基于MC34937的无刷直流电机智能化驱动控制系统
2016-10-12 00:30:33赵鸿宇扈宏杰韩磊
电气传动 2016年4期
赵鸿宇,扈宏杰,韩磊
(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.飞思卡尔半导体(中国)有限公司,天津300385)
基于MC34937的无刷直流电机智能化驱动控制系统
赵鸿宇1,扈宏杰1,韩磊2
(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.飞思卡尔半导体(中国)有限公司,天津300385)
MC34937是一款新型的场效应晶体管(FET)前置驱动器,专用于三相电机控制,具有稳定的数字精度。介绍的基于MC34937的电动自行车无刷直流电机智能化驱动控制系统,提供了更灵活的软、硬件方案,并大大降低了控制系统成本,具有较高的实用价值。实验表明系统启动及空载运行平稳,突然加、减负载时电机转速稳定。
无刷直流电机;智能化;驱动系统;MC34937
无刷直流电机(BLDCM)既具有交流电机运行可靠的优点,又具有传统有刷直流电机优越的调速性能。无刷直流电机凭借其构造简单、运行可靠、调速性能好等优点,被越来越多地应用在电动车领域。无刷直流电机驱动一般由专门的控制芯片来完成。放在电机中的霍耳位置传感器把相应的换相信号传入控制芯片中,控制功率开关根据控制芯片的控制来轮流驱动三相线圈,使电机按要求运行[1]。
电动自行车使用过程中不需要有很高的速度,但是需要频繁加减速和启动,所以电动车驱动控制系统需要有较高的瞬时功率以及功率密度。除了一般的驱动要求,理想的驱动方式应均匀加速、减速和启动,在突然加、减负载时电机转速稳定。
传统的控制芯片控制电机的方法相对单一,过流和过压的保护性能存在缺陷,专用的三相门极驱动器,可实现智能化的驱动方式。MC34937是一款新型的工业级三相门极驱动器,集成了控制和保护直流三相电机所需的逻辑电路以及传感、监控和控制功能,非常适合用于分数和整数的电机控制。
1 智能化驱动系统控制策略
对于自行车电机控制系统,为了满足无超调、抗负载扰动能力强、实时性和快速响应性好的要求,采用转速环、电流环双闭环的控制策略。速度环为外环、电流环为内环,内环外环均采用PI调节,双闭环控制系统结构如图1所示。
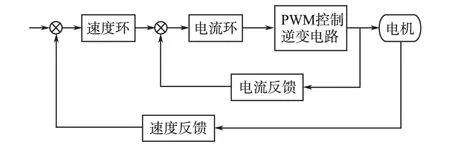
图1 双闭环控制系统结构Fig.1 Double closed loop control system structure
无刷直流电机转速负反馈单闭环控制系统可在保证系统稳定的条件下实现转速无静差,但不能完全按照需要来控制动态过程的电流和转矩。如果对系统的动态性能要求较高,例如要求快速启动、制动等,单闭环控制系统就难以满足要求。为了改善无刷直流电机控制系统的动态特性,就很有必要在速度负反馈单闭环控制系统的基础上再引入电流负反馈环来控制系统动态过程的电流和转矩。
根据电动车的控制特点,本系统采用的专用驱动芯片MC34937,不仅可以极大程度的简化编程,提高控制性能,而且可以减轻单片机的工作负担,更大程度的丰富控制器功能。在供电方面,由于蓄电池是电动车上唯一的电源,但是控制电路和三相逆变器所需的电压是不同的。本文设计了1个电压转换电路,使36 V直流电压转化成5 V的直流电压,同时满足控制电路和三相逆变器的供电要求。
2 系统硬件组成
无刷直流电机具有三相定子绕组以及一个表面装配有永磁体的转子。无刷直流电机通常也被称为电子换相电机,在转子上没有电刷,换相会在特定的转子位置上以电子方式执行[2]。定子磁路通常是由磁性钢片制成,通过设定永久磁铁的磁化方式和在转子上的分布使得定子上的反电动势为梯形波。无刷直流电机比直流电机更可靠,数字控制和电力电子电路取代了机械换相器的功能,并根据转子位置驱动相应的电机绕组[3]。
系统的硬件结构如图2所示,分为以下几个模块:控制电路模块、智能驱动模块(MC34937单片机为前置驱动器的电路)、三相逆变器模块、直流电源模块。在直流电源的供电下,控制电路模块通过MC34937驱动三相逆变器。设计PCB板时,使功率电路和控制电路两部分尽量分开,保证互不干扰。

图2 控制系统硬件组成Fig.2 The consist of control system hardware
2.1智能驱动模块
MC34937智能驱动模块通过6个直接输入控制信号连接到5.0 V的单片机上,SPI端口用于器件设置以及异步复位、使能和中断信号,如图3所示,图3中标出了主要管脚的连接方法。
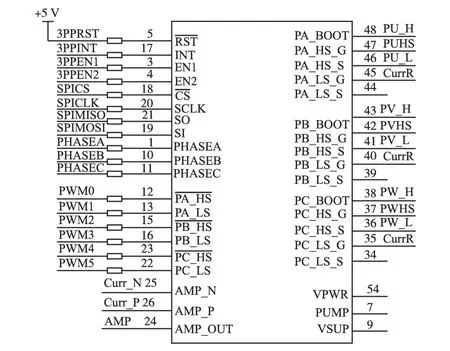
图3 MC34937模块示意图Fig.3 MC34937 module diagram
单片机通过控制MC34937来完成对无刷直流电机的操作,这样做可以大大降低单片机的编程难度,使控制电机变得简单方便。
MC34937是一款工业级三相门极驱动器,专门配置于三相电机控制,具有稳定的数字精度,它便于配置无刷直流电机的电机驱动系统,MC34937的优点主要有:1)电压的工作范围较宽,能支持12 V,24 V和48 V电机控制应用,保证电机即使在电压发生变化的情况下也可以正常工作;2)外部FET的栅极驱动能力大于1.0 A,这样可以降低RDS(ON)和提供充足的电流,来实现预期转矩控制的电机;3)可以无故障的处理来自外部大功率FET的反向电荷注入,从而提高可靠性;4)用户可以通过SPI端口设置死区时间来优化电机性能;5)集成了控制和保护直流三相电机所需的逻辑电路以及传感、监控和控制功能,可以方便用户检测故障。
2.2三相逆变器模块
三相逆变器模块接受控制电路的要求,将直流母线电压逆变为交流电压加在电机的绕组上,从而使电机连续转动。
无刷直流电机去掉了直流电机中的换相器,在定子上装配上了电枢绕组,转子上装配永磁铁。控制电路采用三相星形绕组全控桥电路,定子绕组U,V,W以星形方式连接,位置传感器位于电机相绕组轴线,当位置传感器即霍耳元件检测到转子位置时会反馈回控制电路,控制电路根据反馈的数据,触发导通MOSFET,使电机转动[4]。
无刷直流电机在任意时刻会有两相绕组导通,而第3相绕组会处于悬空状态。功率管的触发状态有6种,每隔60°(电角度)换相1次,每次换相1个功率管,每1个功率管导通120°(电角度)。如图4所示,设无刷直流电动机的开始导通Q1和Q6,电流从Q1管流入U相绕组,再从V绕组流出,经Q6回到电源。此状态维持60°(电角度)后开始换相,功率管Q6关断,而功率管Q2导通,此时导通相为V,W相。这样每经过60°(电角度)就进行1次换相,各功率管的导通顺序是Q6Q1,Q1Q2,Q2Q3,Q3Q4,Q4Q5,Q5Q6。
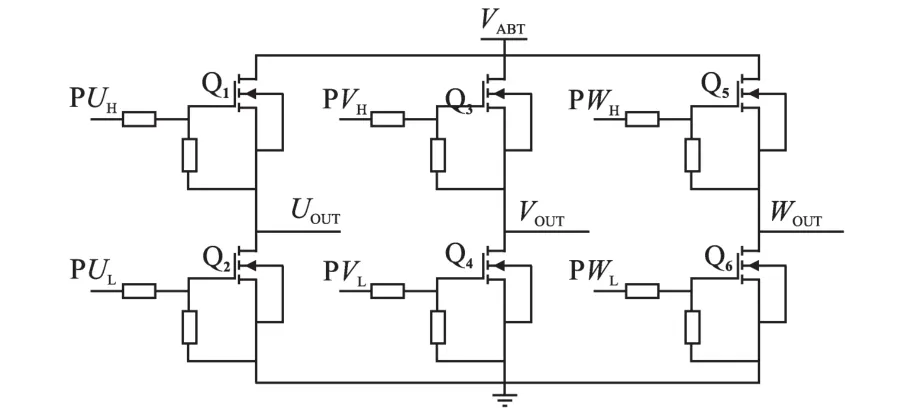
图4 三相逆变器Fig.4 Three phase inverter
2.3直流电压模块
直流电压模块是整个控制系统的能量源泉,电动车上只有蓄电池作为电源,但是控制模块和三相逆变器模块需要的电压是不同的。三相逆变器需要16 V到36 V的直流电压作为母线电压输入,而控制电路需要5 V的直流电压,所以设计了这个电压转换电路。
如图5所示,图5中VBAT为16 V到36 V直流电压,在直流电压模块中,通过使用LM5007芯片,使36 V直流电压转化成5 V的直流电压,为控制板和霍耳传感器提供工作电压。这种控制方法只需输入16 V到36 V直流电压,而不再需要单独输入5 V直流电压,控制方法大大化简。
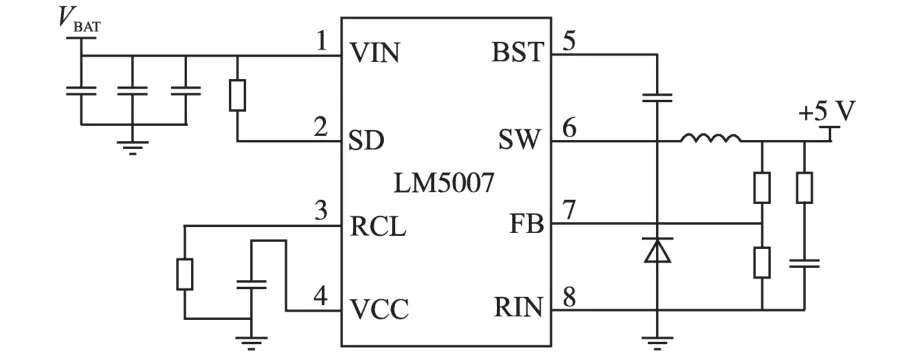
图5 直流电压模块示意图Fig.5 DC voltage module diagram
2.4控制电路
控制电路使用的单片机为飞思卡尔的KE02Z64,该系列的单片机包含1组强大的模拟、通讯、定时和控制外设,具有低功耗、高稳定性和高性价比。主要负责信号的接收和处理、控制策略的实现,是系统控制好坏的关键。电路图如图6所示。
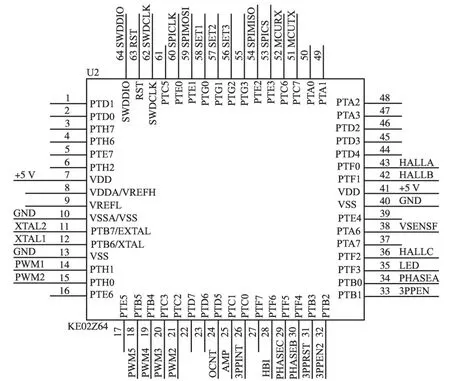
图6 控制电路模块示意图Fig.6 Control circuit module diagram
图6中给出了主要管脚的连接方法,根据工作任务不同可分为以下2个模块。
1)最小系统模块。电源电路、时钟振荡电路、复位电路,这是微处理器能正常工作的前提。
2)功能模块。滤波电路、AD转换、SPI通信、处理位置传感器输入信号等功能。
3 系统软件设计
系统软件主要由主程序和各中断子系统组成。主程序先进行系统的初始化,然后判断电动机的初始位置,等待中断。中断子程序负责计算电机的及时速度和检测转子位置等。程序框图如图7所示。
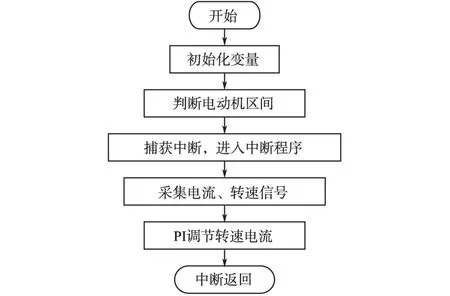
图7 软件框图Fig.7 Software description
直流无刷电机一般希望使用在当负载变动时,速度可以稳定于设定值而不会变动太大。所以本系统采用电流和速度闭环调速,运用PI整定,使电流和速度稳定在一定范围内。
在双闭环控制系统中,将转速环作为外环,电流环作为内环。对于电流环来说,系统根据霍耳传感器反馈的转子位置信息,确定是哪一组的MOSFET导通,来进行电流换相。对于速度环,作用是使系统的转速跟随给定的变化,稳态时消除静差,抑制负载变化带来的扰动,系统根据旋转编码器的信息得出转速的大小,然后与之前设定的转速相比较,通过PI整定得到1个输出,这个输出信号作为电流环的给定信号。系统检测出实际电流大小,与给定信号相比较,通过PI整定最后得到PWM占空比的大小。
4 实验结果
实验电机采用欧码(AUMA)无刷直流电动机,额定电压36 V,额定功率350 W,材质为铝合金;霍耳元件距离120°(电机1周共3个霍耳元件,每隔120°放置1个);实验直流电源采用SHUANGYE生产的电动车锂电池,额定电压36 V,容量12A·h,重量3.2 kg。
测试条件为电压36 V,测试结果如图8和图9所示,图8为空载50 s后,加恒转矩8 N·m。图9 为0~30 s空载,30~70 s加负载到8 N·m,最后减到4 N·m又加到8 N·m。
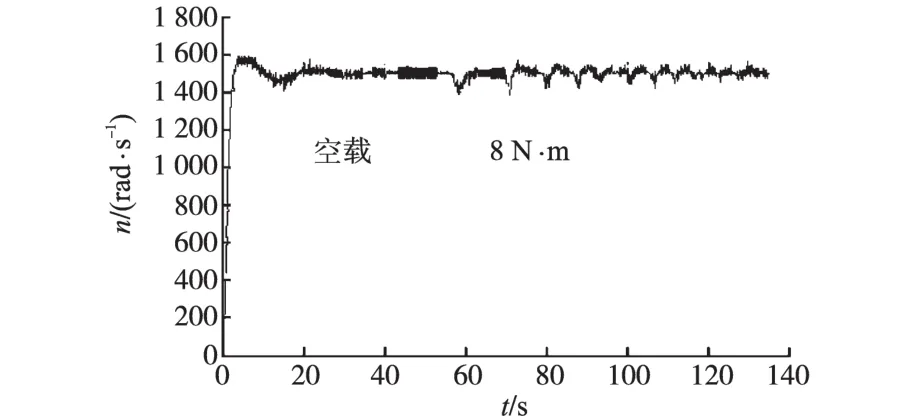
图8 无刷直流电机加载实验Fig.8 Brushless DC motor increasing load experiment
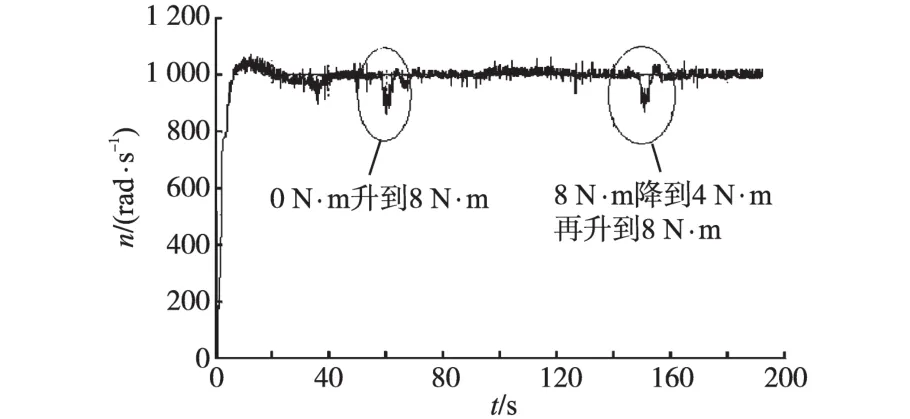
图9 无刷直流电机改变负载实验Fig.9 Brushless DC motor changing load experiment
从图8、图9中可以看出,采用上述控制方法,电机平稳启动,空载运行稳定。突然加载和突然减小负载时,电机的转速都能稳定在设定转速而不发生大的变化。电机转速曲线响应较好,设计控制的策略达到了预期的效果。
5 结论
本文介绍了一种基于专用驱动芯片MC34937的电动自行车用无刷直流电机智能化驱动控制系统,与传统的控制芯片控制电机系统相比,提供了更灵活的软、硬件方案,并大大降低了控制系统成本,具有较高的实用价值。实验表明上述无刷直流电机系统的控制效果好,有较好的可行性。
[1] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[2] 刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
[3] 叶金虎.现代无刷直流永磁电动机的原理和设计[M].北京:科学出版社,2007.
[4] 张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87-91.
Brushless Motor Intelligent Drive System Based on MC34937
ZHAO Hongyu1,HU Hongjie1,HAN Lei2
(1.School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China;2.Freescale Semiconductor,Tianjin 300385,China)
The MC34937 is a new field-effect transistor(FET)pre-driver designed to enable three-phase motor control configurations with stable digital accuracy.Presented an intelligent drive system of the brushless DC motor based on MC34937.This system provided a more flexible hardware and software solutions,and greatly reduced the cost of the control system and was of high practical value.Experiments show that the system is smooth and steady when it starts and idle runs,and the motor speed keeps stable with sudden add or subtraction of the load.
brushless DC moto(rBLDCM);intelligent;drive system;MC34937
TM351
A
2015-09-15
赵鸿宇(1992-),女,硕士研究生在读,Email:zhaohongyu1992@buaa.edu.cn
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
莆田学院学报(2021年5期)2021-11-13 06:36:38
甘肃科技(2020年20期)2020-04-13 00:30:22
汽车维护与修理(2019年3期)2019-08-08 02:29:10
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
电子制作(2017年1期)2017-05-17 03:54:12
电测与仪表(2016年1期)2016-04-12 00:35:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17