
基于区域检测的多尺度Harris角点检测算法
2016-10-11 07:59:17吴鹏徐洪玲李雯霖宋文龙张佳薇
哈尔滨工程大学学报 2016年7期
吴鹏,徐洪玲,李雯霖,宋文龙,张佳薇
(东北林业大学机电工程学院,黑龙江哈尔滨150040)
基于区域检测的多尺度Harris角点检测算法
吴鹏,徐洪玲,李雯霖,宋文龙,张佳薇
(东北林业大学机电工程学院,黑龙江哈尔滨150040)
针对传统Harris算法检测的角点遍布整个图像和对尺度变化较敏感的问题,本文提出将区域检测方法和多尺度Harris角点检测算法相结合,使检测到的角点数目更少,以提高后续的图像匹配重建的效率。首先,利用区域检测的算法构造图像显著图,采取腐蚀膨胀操作提取出目标区域作为候选的检测区域;其次,利用多尺度结合非极大值抑制的方法改进Harris算法,检测图像的角点并标记。仿真结果表明:本文方法能进一步提高角点检测的精确度和速度,同时在不改变任何参数的情况下,对于图像旋转能够减小角点提取的差异,增强算法的多尺度性。
角点;Harris算法;区域检测;多尺度方法;非极大值抑制;图像旋转
角点是图像的一个重要局部特征,包含物体重要的特征信息,可表现为灰度值突然变化的像素点或物体轮廓边缘线的相交点。角点具有算法适应性强、过程简单、结果稳定等优点,检测到的角点精度和稳定性更是对后续的图像匹配、图像拼接、物体识别等视觉处理任务有直接的影响[1],因此角点检测在图像处理和模式识别中具有非常重要的作用。
目前的角点检测算法主要可以分为以下两种:基于边缘的角点检测算法和基于灰度变化的角点检测算法。第1类首先对图像进行边缘链码的提取,依据相邻码值之间的差别来确定是否为角点,这种算法存在计算量大、过程不稳定等缺点[2]。第2类是由曲率和梯度的计算来提取角点,典型的代表算法有:Moravec算法、Harris算法、SUSAN算法等[3]。其中Harris算法以计算简单、检测角点理想、稳定性较高等优点被广泛应用,但是如果对特定目标进行检测时,Harris算法提取到的角点遍布于整个图像,不能准确提取目标物体,且对于尺度变化的图像,检测结果差异很大等问题[4]。
文献[5-6]将尺度不变特征理论引入到Harris特征检测算法中,实现尺度不变的Harris特征点检测,但是这种算法检测到的特征点并不稳定。文献[7]通过研究Harris尺度不变性的关键点检测子,纠正了Harris尺度不变性检测子是不稳定的错误结论。文献[8]将尺度空间与Harris算子相结合,通过设定阈值TH来获得较稳定的角点,但阈值TH的设定是固定的,对不同图像不具有通用性。文献[9]通过结合尺度空间和自适应阈值的方法,检测到的伪角点较少,但提取的角点遍布整个图像,不利于对目标物体的检测。本文在文献[9]的基础上应用一种区域检测的方法优化多尺度Harris检测算法,与传统的Harris算法作对比实验,验证本文算法的合理性。
1 Harris角点检测算法
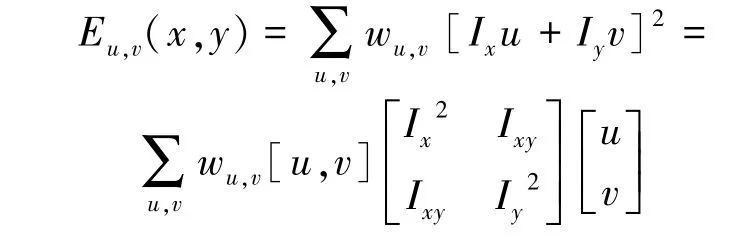
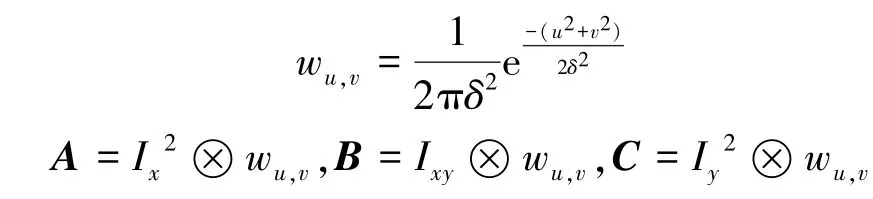
1988年,C.Harris和M.J.Stephens提出了Harris特征点提取算子,是运用微分运算和自相关矩阵来检测图像的角点[3]。假设一幅图像,高斯窗口以像素点(x,y)为中心,在x方向和y方向分别移动(u,v)后,产生的灰度强度变化平均能量计算公式:

式(1)由泰勒公式展开并忽略高阶项得
通过计算矩阵M,可以得到Harris算子的角点响应函数CRF为
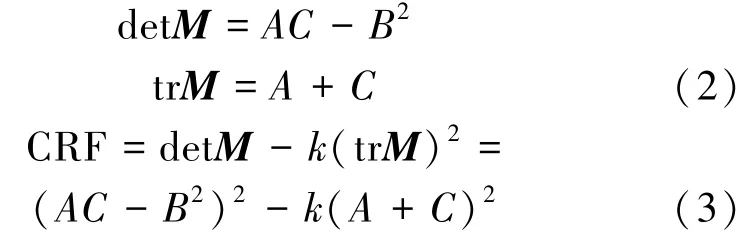
式中:detM表示矩阵M的行列式,trM为矩阵的迹,k是一个经验值,一般取0.04~0.06。
当某点计算的CRF值在局部区域内为极大值并大于设定阈值TH时,则该点是需要提取的角点。
由以上方法检测出的角点图如图1所示。通过结果图可以知道,实际应用中,Harris算子是一种简单稳定的角点检测算子,但图1(b)检测到的角点存在于整个图像,并不利于对特定目标的分析和提取;并且Harris算子对尺度变化敏感,如在不改变任何参数下,对于图像旋转一定角度,图1(c)检测的结果相对图1(b)而言,角点密集度降低,背景区域角点检测结果差异更明显。

图1 传统Harris角点检测算法检测结果图Fig.1 Detection results of traditional Harris corner detection algorithm
2 基于区域检测Harris多尺度角点检测
针对Harris上述问题,本文提出了优化的区域检测算法和改进的多尺度Harris角点检测算法。有效的实现目标物体的提取和检测,提高图像的自动处理能力。
2.1区域检测算法
从信息理论角度,图像的信息可以分为冗余和变化两个部分。由于人类的视觉对变化区域的敏感性,区域检测就是保留图像中的变换部分,去除冗余部分,获得图像的显著图。本文应用一种图像视觉显著性的简单计算模型,通过计算对数残差谱来提取显著性区域[10-11]。对于一幅自然图像I(x,y),检测的区域就是利用逆傅里叶变换计算得到在空间域的显著图。为获得更好的视觉效果,使用高斯滤波器wx,y,显著图可由式(4)~(7)计算:


式中:A(I)为图像的幅度谱,P(I)为图像的相位谱,R(I)为图像残差谱,hn(I)是一个n×n的均值滤波的卷积核,本文n取3,S(x,y)表示最终获得的显著图。
为了得到图像的目标区域,需要对显著图进行二值化处理,就需要阈值对背景和目标两类进行分割,获得二值图像表示为
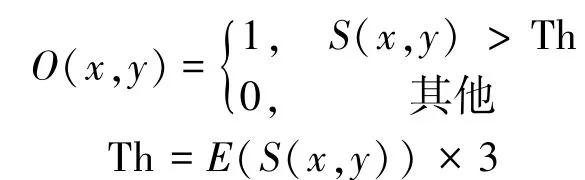
式中:Th为分割的阈值,E(S(x,y))表示显著图灰度的平均值。
2.2优化的区域检测算法
Th的值对图像目标和背景的分割效果有直接影响,本文中采用一种自适应阈值方法[12]。由图2 (a)可以知道,显著图中白色代表前景部分,黑色代表背景部分,使得两部分的信息熵之和最大的灰度值就是图像的最佳分割阈值Th:

式中:pi表示显著图中灰度值i出现的概率,L是显著图中像素灰度值的最大值。
由图2(b)可以发现,生成的二值图在背景部分仍然会有许多分散的、小的显著区域,干扰目标部分的选择,使生成的目标图不够明确。
因此,本文在阈值分割之后,对生成的二值图像进行先腐蚀再膨胀的形态学操作,消除背景部分小的白色区域,填充目标部分细小的黑色空洞,与邻近部分融为一体,平滑目标物体的边界。这种方法可有效形成目标部分的目标图,同时并不会改变原来物体的面积,分割效果更佳准确。A(x)代表操作时选择的结构元素,对空间E中的每一点x,开运算的过程即先腐蚀再膨胀的操作可以定义为
通过此方法获得的显著性区域检测分割结果如图2(c)。

图2 显著性区域检测分割图Fig.2 Significant region detection segmentation figures
2.3改进的多尺度Harris角点检测算子
尺度空间是引入尺度变化的核函数,与原图像卷积获得图像在多尺度空间下的空间序列。本文改进的多尺度Harris角点检测算子的计算步骤为:
1)引入尺度空间因子,计算自相关矩阵。设尺度空间积分因子为δD,尺度空间微分因子为sδD,自相关矩阵计算公式为[13]:
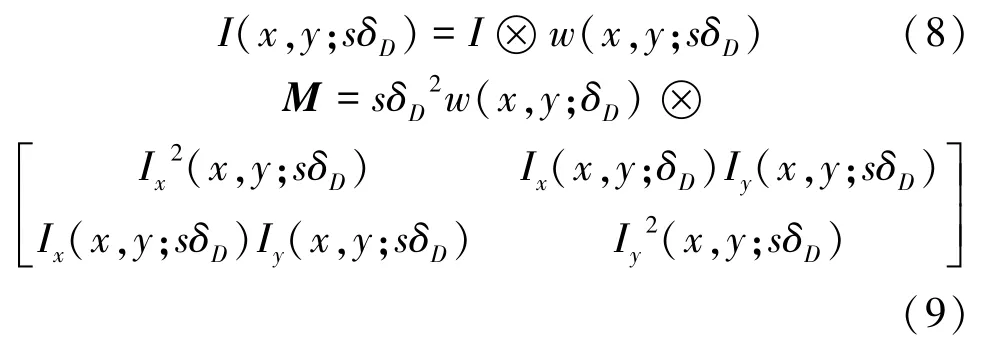
式中:s为常数,s<1。
2)计算角点响应函数。为了避免k值选取的随机性影响图像的角点检测效果,使结果不令人满意,本文中,对Harris算法的角点响应函数进行了如下改进[14],定义为

3)局部非极大值抑制。为了实现Harris算子对旋转图像的适应性,提高算法的自动处理能力,选取半径为2的圆形模板。根据圆的性质,图像旋转时能保证非极大值抑制中心点不变,在模板区域获得极大值点,模板的数学表达式描述和图形如下

获得的最大值R(i,j)的点就为角点,记录其位置(i,j),对角点进行标记。

图3 半径为2的圆形模板Fig.3 Circular template with a radius of 2
2.4本文算法流程图
通过以上分析,对Harris角点检测算法进行改进,本文算法的流程图如图4所示。
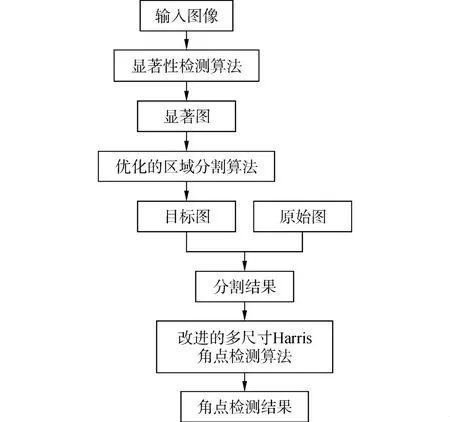
图4 本文算法的流程图Fig.4 Flow chart of algorithm in this paper
通过此方法获得的角点数目较少,并且多集中于目标区域内,滤除背景的角点干扰,提高角点检测性能。
3 实验结果与分析
为了验证该算法的有效性,利用同一幅图像进行仿真分析。本文算法中利用区域检测算法结合多尺度Harris算法,应用本文算法和文献[9]的算法对原图像及旋转后的图像进行角点检测,结果如图5所示;传统Harris算法和本文算法检测角点的数目和时间如表1所示。
由实验得到结果图5和表1的数据,和图1中的检测结果作对比可知,应用本文算法检测到的角点多集中于目标物体上,滤除背景上的大部分角点,提高了角点检测的精度,减小了后续的角点匹配与重建的计算量;同时相对于传统的Harris算法对于旋转图像检测角点结果差异大的缺点,本文算法能够有效的抑制Harris算子的旋转差异性,提高算法的多尺度性。

表1 传统Harris算法和本文算法的检测结果对比Table 1 Results comparisons of traditional Harris algorithm and this algorithm
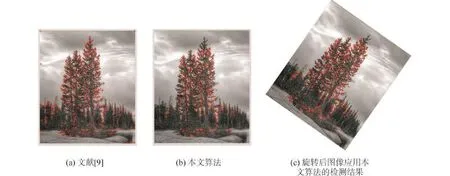
图5 两种算法实验结果Fig.5 Experimental results of two algorithms
4 结论
本文结合已有算法的一些优点,针对Harris角点检测算法存在的一些缺点进行了研究。该方法利用优化的区域检测算法,更加准确的检测出目标区域;然后对多尺度Harris角点检测算法进行改进,引入微分和积分尺度因子,去除影响因子k,采用圆形模板进行非极大值抑制,克服尺度敏感性,具有一定自适应能力。通过实验对本文提出的算法与传统的Harris算法做比较,仿真结果表明:
1)传统的Harris角点检测算法检测到的角点多且分散,对于旋转后的图像,检测结果存在较大的差异性;
2)本文算法检测到的角点数目相对较少,而且一定程度上缩短了检测时间;
3)对于旋转后的图像应用本算法检测误差较小,具有良好的稳定性和可靠性。
本文算法虽然提高了角点检测效率,但却未能真正达到对目标的精确检测,在以后的工作中将继续研究。
[1]徐贤锋,檀结庆.一种改进的多尺度Harris特征点检测方法[J].计算机工程,2012,38(17):174-177. XU Xianfeng,TAN Jieqing.An improved multi-scale Harris feature point detection method[J].Computer engineering,2012,38(17):174-177.
[2]QUDDUS A,FAHMY M M.An improved wavelet-based corner detection technique[C]//Proceedings of the IEEE International Conference on Acoustics,Speech,and Signal Processing.Phoenix,USA:IEEE,1999,6:3213-3216.
[3]HARRIS C,STEPHENS M.A combined corner and edge detector[C]//Proceedings of the 4th Alvey Vision Conference.Manchester,UK:Blackwel,1988:147-151.
[4]SCHMID C,MOHR R,BAUCKHAGE C.Evaluation of interest point detectors[J].International journal of computer vision,2000,37(2):151-172.
[5]高晶,吴育峰,吴昆,等.基于角点检测的图像匹配算法[J].仪器仪表学报,2013,34(8):1717-1725. GAO Jing,WU Yufeng,WU Kun,et al.Image matching method based on corner detection[J].Chinese journal of scientific instrument,2013,34(8):1717-1725.
[6]MIKOLAJCZYK K,SCHMID C.Scale&affine invariant interest point detectors[J].International journal of computer vision,2004,60(1):63-86.
[7]程邦胜,唐孝威.Harris尺度不变性关键点检测子的研究[J].浙江大学学报:工学版,2009,43(5):855-859. CHENG Bangsheng,TANG Xiaowei.Study of Harris scale invariant keypoint detector[J].Journal of Zhejiang university:engineering science,2009,43(5):855-859.
[8]黄帅.基于Harris尺度不变特征的图像匹配算法研究[D].合肥:合肥工业大学,2010. HUANG Shuai.Research on image matching algorithm based on scale invariant feature[D].Hefei:Hefei University of Technology,2010.
[9]温文雅.一种改进的Harris多尺度角点检测算法[J].重庆理工大学学报:自然科学,2012,26(8):94-97. WEN Wenya.An improved algorithm for Harris multi-scale corner detection[J].Journal of Chongqing university of technology:natural science,2012,26(8):94-97.
[10]HOU Xiaodi,ZHANG Liqing.Saliency detection:a spectral residual approach[C]//Proceedings of 2007 IEEE Conference on Computer Vision and Pattern Recognition. Minneapolis,MN:IEEE,2007:1-8.
[11]李海洋,文永革,何红洲.一种改进的SIFT特征点检测方法[J].计算机应用与软件,2013,30(9):147-150. LI Haiyang,WEN Yongge,HE Hongzhou.An improved SIFT feature point detection method[J].Computer applications and software,2013,30(9):147-150.
[12]张巧荣,景丽,肖会敏,等.利用视觉显著性的图像分割方法[J].中国图像图形学报,2011,16(5):767-772. ZHANG Qiaorong,JING Li,XIAO Huimin,et al.Image segmentation based on visual saliency[J].Journal of image and graphics,2011,16(5):767-772.
[13]汪华琴,谈国新,钱小红,等.一种基于曲率尺度空间的自适应角点检测方法[J].计算技术与自动化,2007,26(2):123-127. WANG Huaqin,TAN Guoxin,QIAN Xiaohong,et al.An adaptive corner detector based on curvature scale space [J].Computing technology and automation,2007,26 (2):123-127.
[14]NOBLE J A.Finding corners[J].Image and vision computing,1988,6(2):121-128.
本文引用格式:
吴鹏,徐洪玲,李雯霖,等.基于区域检测的多尺度Harris角点检测算法[J].哈尔滨工程大学学报,2016,37(7):969-973.
WU Peng,XU Hongling,LI Wenlin,et al.Multi-scale Harris-corner detection algorithm based on region detection[J].Journal of Harbin Engineering U-niversity,2016,37(7):969-973.
Multi-scale Harris-corner detection algorithm based on region detection
WU Peng,XU Hongling,LI Wenlin,SONG Wenlong,ZHANG Jiawei
(College of Mechanical and Electronic Engineering,Northeast Forestry University,Harbin 150040,China)
In this paper,we address the problems associated with the Harris-corner detection algorithm,in which corners are extracted from the entire image and there is sensitivity to scale change.We combine region detection and the multi-scale Harris-corner detection algorithm,such that fewer corners are detected and more efficient subsequent image matching and reconstruction is achieved.First,we use the region detection algorithm to construct an image saliency map,and use the erosion and dilation operations to extract the target region as a candidate detection region.Next,multi-scale method combines with non-maxima suppression method is used to improve Harris algorithm,to detect the corners and mark.Simulation results show that the method achieves better accuracy and speed in corner detection.Furthermore,without changing any parameters,this algorithm reduces the differences due to the extracted corners and enhances the multi-scale of the algorithm for image rotation.
corner detection algorithm;Harris algorithm;region detection;multi-scale method;non-maxima suppression;image rotation
10.11990/jheu.201507028
TP391.4
A
1006-7043(2016)07-969-05
2015-07-09.网络出版日期:2016-05-13.
国家自然科学基金面上项目(31470714);中央高校基本科研业务费专项资金项目(2572014CB14);哈尔滨市科技创新人才研究专项资金项目(2014RFQXJ127);黑龙江省博士后科研启动金项目(LBH-Q14006).
吴鹏(1980-),男,副教授,博士;张佳薇(1975-),女,副教授,博士.
张佳薇,E-mail:zjw@nefu.edu.cn.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160513.1344.018.html
猜你喜欢
数学物理学报(2021年2期)2021-06-09 08:54:26
矿产勘查(2020年8期)2020-12-25 02:47:14
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
魅力中国(2016年42期)2017-07-05 21:16:42
电子科技(2016年12期)2016-12-26 02:25:49
数学物理学报(2016年3期)2016-12-01 05:36:27
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
软件导刊(2015年8期)2015-09-18 13:24:38
