
步行割灌机行走部分结构设计与研究
2016-10-10 03:25杨春梅郭明慧
森林工程 2016年5期
杨春梅,郭明慧,马 岩,王 爽
(东北林业大学 机电工程学院,哈尔滨 150040)
步行割灌机行走部分结构设计与研究
杨春梅,郭明慧,马岩,王爽
(东北林业大学 机电工程学院,哈尔滨 150040)
为研究目前能够满足进行爬山而且能够自主作业的小型设备,提出一种步行割灌机行走部分的设计。阐述新型步行割灌机行走部分的工作原理和结构设计,以及对步行机构、行走机架和控制机构进行参数设计和计算。步行机构的行走是将动力传递到曲轴上的输入轴,由输入轴传递到凸轮,凸轮带动腿向前行走。对曲轴主轴径、长度、曲柄等参数进行设定,选用组合式曲轴,加入凸轮机构进行防震,利用两只脚通过连接板的连接,构成一组具有良好的结构稳定性、较强的机动性能和跨越能力、近似平行四边形的机构将步行机构设计出来。利用方钢管承载重力小,具有足够刚度,良好抗震性的特点将其应用于行走部分的行走机架,并与步行机构用曲轴相连接。采用牙嵌式离合器,依据离合器的接合过程对摩擦转矩进行分析,计算出控制机构主要参数。最后将该行走部分应用于步行割灌机,得到所需合理的爬山机构。结果表明:该设计可实现割灌机爬山和自主作业的功用。
割灌机;爬山机构;行走部分;结构设计
0 引 言
割灌机在林业上用于林地清理、幼林和成林抚育、次生林抚育改造等多种作业。主要以切割直径18 cm以内的多种林木和杂草。目前割灌机在林业、园艺和农牧等多个行业都有广泛的应用[1]。割灌作业是城市园林绿化必不可少的工作,园林工人在清除杂草、修剪灌木时经常使用割灌机来完成绿化作业[2]。而我国灌木树种资源极为丰富,根据沙生灌木的生物学特性,每3~5 a就需进行平茬。平茬收割时若手工劳作,其劳动强度大且生产效率低,因此只有使用专业的割灌机械才能提高生产效率[3]。割灌机是割除灌木、杂草的便携式机械,靠高速旋转的锋利刀片切割树木枝桠、藤蔓或半木质化草株[4]。
在如今这个机械行业越来越发达的时代,机械的各种机构也靠着先进的方向迈进,能够满足人类工作作业的机器也越来越多,但是,很多机器都是可以满足在路面平整或者没有坡度的路面行走,能够满足进行爬山而且能够自主作业的小型机械设备的种类少之又少。本文将介绍这种能够爬山且自主作业割灌机的行走部分。林间步行割灌机的行走机构在整机设计中尤为重要,在复杂的林区环境下工作,设计时要考虑机器良好的越障能力和防倾覆能力[5-7]。行走机构也称行路机构,如图1所示,主要由前导杆系、行走机架、后导杆系、左步行机构、离合器以及右步行机构组成。行走机架与步行机构用螺钉相连接,机架位于驾驶室的下部,二者都是由前后导杆系相连,驾驶室安装在导杆系的上方,导杆系的下部连接行走机架。
本文设计的步行割灌机中的行走部分主要由行走部分机架、前后导杆系、步行机构和控制机构等组成。步行割灌机的行走机构在整机的最下方,起到支撑驾驶室与割灌部分的作用,同时也是用于前进的主要部件。

1.前导杆系 2.行走机架 3.后导杆系 4.左步行机构 5.离合器 6.右步行机构 7.减速汽油机1.Leading bar system 2.Walking frame 3.Rear guide bar system 4.Walk left institution 5.The clutch6.Walk right institution 7.Speed gasoline engine图1 步行割灌机行走机构Fig.1 Walking mechanism of walking brush breaker
1 设计需求
根据步行割灌机设计初始考虑,作为可以在林间既能直线行走,又可以在有坡度的地面上行走,同时具备一定的转弯功能,所以该行走部分的设计应从行走、越障和爬坡等方面考虑。此步行割灌机主要是用于林区复杂的环境,不仅可以使机器有一定的直线行走能力,还可以具有一定的越障能力,这种机器可以解决轮式或履带式机械在林区行走的不足[8],因此步行割灌机在设计过程中的设计需求见表1。
根据现阶段我国人工灌木林的现状,对割灌机的参数进行确定:林间步行割灌机需跨越有一定高度的障碍物,如小型灌木和杂草,越障高度可以达到100 mm;可以在林间进行平稳的速度行走,行走速度达到3~8 km/h;由于林间的道路崎岖不平等各种复杂环境,机器的整体设计应趋于小巧、灵活等特点,使机器可以方便在林间自由工作,所以外形尺寸应保证在1800 mm×1200 mm×1900 mm;步行割灌机可以进行爬坡,但是爬坡角度应有一定的限制,角度过大,整个机器爬坡难度增大,消耗能源较大,因此爬坡角度限制在35°以内为最好;由于步行割灌机在转向、爬坡和作业等都是由操作者控制,所以整个机器的质量不易偏大,质量过大将会影响整个机器的行走速度和浪费能源,因此整个机器的质量不应该超过150 kg;对于步行机整机的四周不应该有棱角,否则可能会刮断林区的灌木或杂草;步行割灌机的外部尽可能采用轻型质量的材料,这样可以减小整机的质量,防止由于笨重而产生不必要的影响。
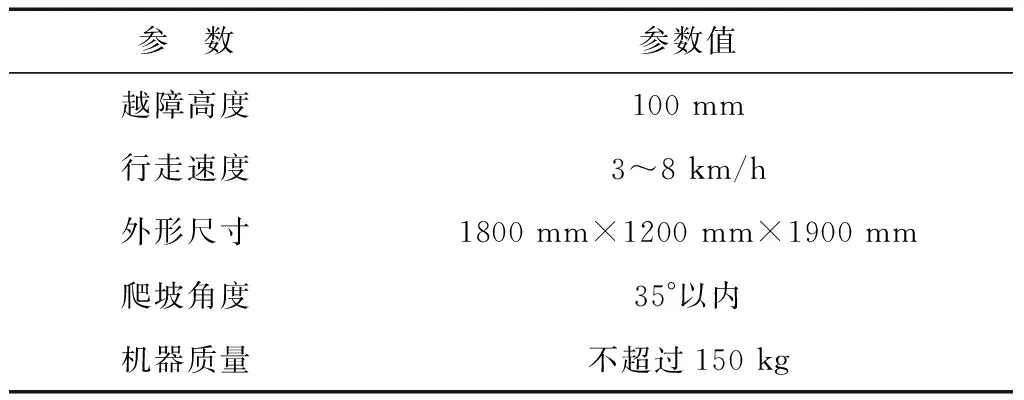
表1 林间步行割灌机设计需求
2 步行割灌机步行机构设计
如图2所示,步行割灌机的步行机构主要是由曲轴、端轴、轴承座、连接板、前底脚与后底脚等组成。在此次设计的行走机构共有8个平行四边形机构,每个四边形机构有两只脚支撑,这样就可以保证不同的四边形机构上每个角之间的轴向夹角形成90°,每一个侧面的四只脚在不同时间内交错着地,这样保证了在任何时间都至少有两只脚在地面上,而这两只脚分别在机器行走机构的两侧,这样既可以保证机器本身可以顺利向前方向行走,又可以保证行走时的稳定性。
步行割灌机的行走方式相比较传统的履带式和轮式机器来说,有更大的优势在于较强的活动能力和牵引能力,跨越障碍的能力也有较大的优势[9]。该行走部分是一种仿生行走机构,如图3所示,两只脚通过连接板的连接构成一组近似平行四边形的机构,即平面四连杆机构[10],共有8个平面四连杆机构,左右对称。与众不同的是,通过汽油机驱动多组行走机构实现行走,具有良好的结构稳定性,系统的平衡难度补偿也降低,对于其有着较高的机动性能和跨越能力。此设计的导向机构是曲柄摇杆机构为该设计的关键点。在设计计算机构的自由度时,只需要考虑一个平面四连杆即可,其他的都为虚约束,只是为了使步行割灌机稳定而设计的,不会影响机器的自由度的计算。

1.曲轴 2.端轴 3.轴承座 4.后底脚 5.连接板 6.前底脚 7.凸轮1.The crankshaft 2.End shaft 3.The bearing seat 4.Rear bottom foot 5.Connect plate 6.Before the foot 7.The Cam图2 步行机构Fig.2 Walking mechanism

图3 平面四连杆机构Fig.3 Planar four-bar linkage
在设计该步行机构的自由度时,机械具有确定运动的条件是机构的原动件数等于自由度数,因原动件为1个,故自由度数只需考虑一个即可,如图3所示,其他7个都为该机构的虚约束,对于机器的整体自由度没有产生任何影响。四边形自由度计算公式[11]为:F=3n-2PL-PH,其中n是该机构总活动构件数,PL为该机构低副的数目,PH为该机构高副的数目,在本机构的设计的自由度中,n=3、PL=4、PH=0得出自由度F=1。
在设计该机构的后底脚时,考虑到其跨越地面的稳定性,故采用三角形肋板的稳定结构,后底脚为120°的三角形,且为了保证其稳定性和强度要求,将脚底板设计为长360 mm,宽45 mm的钢板形式。因其前底脚之前需要加装割灌部分的圆锯片、防护罩等,故前底脚为后底脚同型的不对称结构。
步行机构的行走是将动力传递到曲轴上的输入轴,由输入轴传递到凸轮,在凸轮转动时,行走机构的第一条腿也随之转动,凸轮转动的角度与腿的转动角度相同,之后其余腿也随之转动,这样每条腿都会向前行走[12]。反之当动力传递到曲轴为反转时,每条腿便会向后行走,形成步行机构的倒挡。行走机构中第一条腿由凸轮带动旋转,凸轮代替曲柄,目的是抵消机器在行走时产生的震动,凸轮与底脚关系如图4所示。
1.凸轮 2.后底脚1.The Cam 2.Rear bottom foot图4 凸轮与后底脚连接图Fig.4 CAM with foot after connection diagram
轴承座是用于支撑步行机构脚与曲轴的作用。连接板是用于连接同一方向的两只脚,两只脚通过连接板的连接构成一组近似平行四边形的机构(如图2(a)所示),该机器左右两侧共有8个平行四边形机构,这些机构通过汽油机提供动力,由步行机构的曲轴依次将一侧的四个腿抬起,而四个腿抬起的高度取决于曲轴曲柄的长度,四个腿的曲柄所成的角度依次相差90°,这样可以保证每次行走时整机至少有两条腿在地面上,具有良好的结构稳定性,这种机构有着较强的机动性能和跨越能力。
2.1曲轴的分类及分析
曲轴机构大致可分为:整体式和组合式。本文采用的是新型组合式偏心轮轴曲轴机构,该曲轴机构为四拐曲轴,每一个曲拐都是由两个被曲柄销连
接在一起的曲柄臂组成。四个曲拐通过多个主轴颈完成连接在一起。组合式偏心曲轴相比较传统整体式曲轴的优点有:
(1)曲轴是由多点支撑,与传统大跨距的两个端点的结构相比,刚性和强度大大增强,有利于承受较大的弯矩 。
(2)各个零部件的制造也是十分简单,热处理质量好控制,而不像整体式曲轴加工工艺那样困难。
(3)拆卸方便,可以用滚动轴承为转动副,有利于润滑,能够提高曲柄机构的运动性能。
2.2曲轴的设计
通过步行机构即可实现机器的行走,它是模仿人的行走姿势而设计的[13],此设计采用的平行四边形机构可以使机器行走稳定,为避免相互之间产生干涉现象,引入了曲轴[14]。本次设计的曲轴与汽车中的曲轴不同,该曲轴共有四个拐,每个拐上都与步行机构的腿相连,而这个拐的长度就是曲柄的长度。
图5为该四拐曲轴端面示意图,若将第一曲柄转角设为X1=X,则第二曲柄转角为X2=X+270°,第三曲柄转角为X3=X+180°,第四曲柄转角为X4=X+90°。四个曲柄的角度在任何情况下都各自成90°。
通常情况下,曲轴主要是将活塞的往复运动转变成自身的圆周运动。但是本文在设计曲轴时是将它作为步行割灌机行走部分的主要部件,整个机器是以模仿人的行走方式为基准,所以曲轴的尺寸和质量影响着整机的工作性能,曲轴的强度影响整机的寿命。
因此在设计曲轴的过程中,首先应该准确地选择要设计的参数、计算变量等多个方面,使设计达到最优。
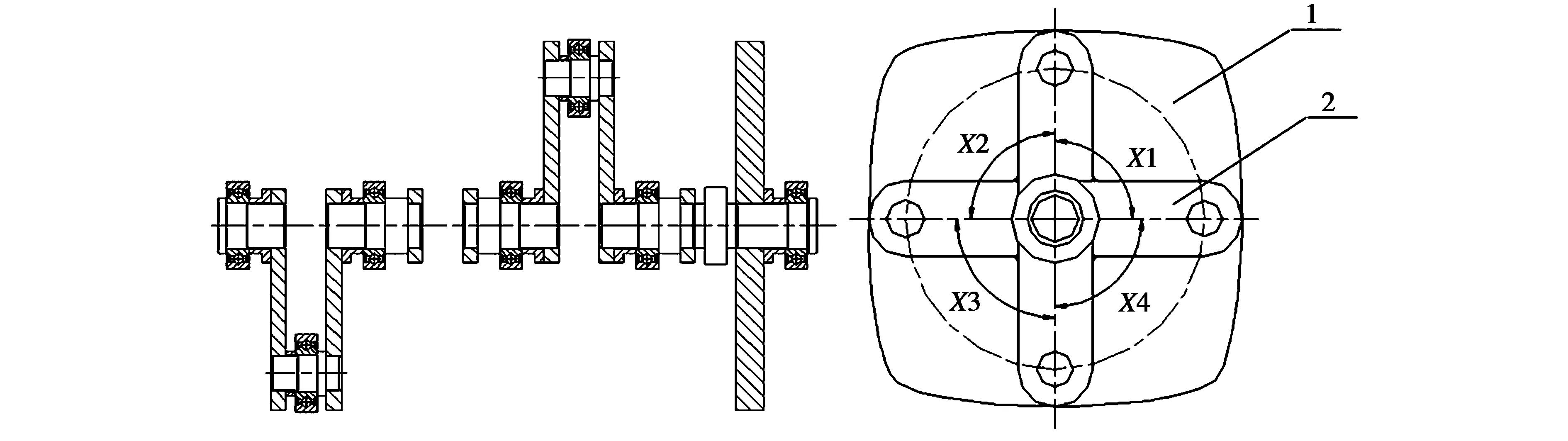
1.凸轮 2.曲柄1.The Cam 2.The crank图5 四拐曲轴示意图Fig.5 Sketch of four-turn crankshaft
曲轴的参数设定:
主轴径:

(1)
主轴的长度L=451 mm。
式中:C为由轴的材质和承载情况确定的参数129;P为轴传递的功率2.1,kw;n为主轴的转速295,r/min。
在曲轴的设计过程中,曲柄的长度值也是非常重要的,曲柄的长度主要是由步行割灌机的速度、越障能力和整个机器的尺寸决定的。
曲柄长度:由该步行割灌机的越障能力为100 mm可确定曲柄长度为120 mm。
曲柄高度:
F/πdh≤[σ]。
(2)
式中:F为曲柄受重力,N;D为曲柄轴径,mm;H为曲柄高度,mm;[σ]为曲柄材料的许用应力120 MPa。
由公式(2)解得曲柄厚度为8 mm。
曲柄宽度:已知曲柄上的孔为20 mm,可知该件的边缘与零件外形边缘不平行时,该最小距离应不小于材料厚度8 mm,取10 mm,故步行割灌机最终曲柄尺寸参数确定为:长度120 mm,宽度40 mm,厚度8 mm,如图6所示。
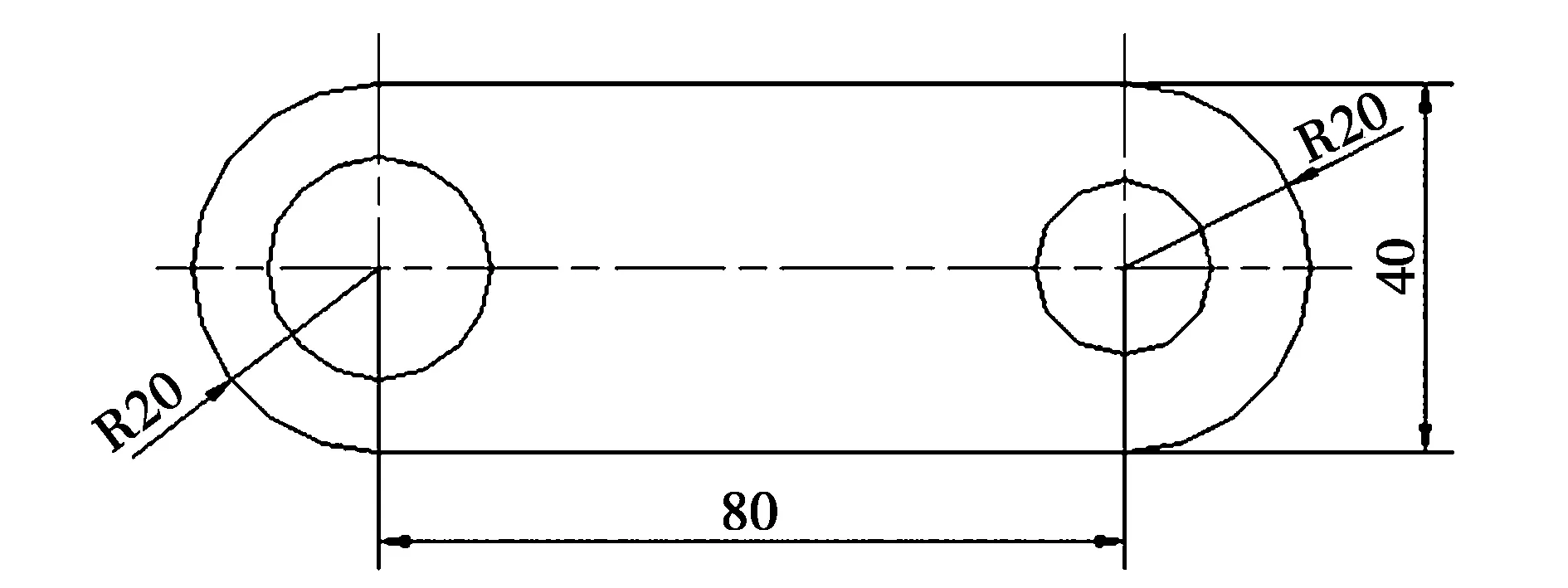
图6 曲柄结构图Fig.6 Crank structure
在设计此曲轴曲柄臂的形状时大多数都分成圆形和椭圆形,圆形曲柄的优势是便于机械加工和抛光,因此采用圆形曲柄臂,表面抛光是增强曲轴疲劳强度的重要方法之一。正确合理选择曲柄臂的厚度和宽度,可以保证曲轴的刚度和强度达到最优值。曲柄臂的抗弯模数用Wσ来表示:

(3)
式中:b为曲柄臂的宽度,mm;h为曲柄臂的厚度,mm。
由公式(3)可以得到,在增加曲柄抗弯能力上,增加曲柄的厚度比宽度要好得多。例如,h增加10%,Wσ提高21%;而宽度增加10%,抗弯强度只增加了10%,造成这种原因是曲柄臂越宽导致应力分布不平衡。
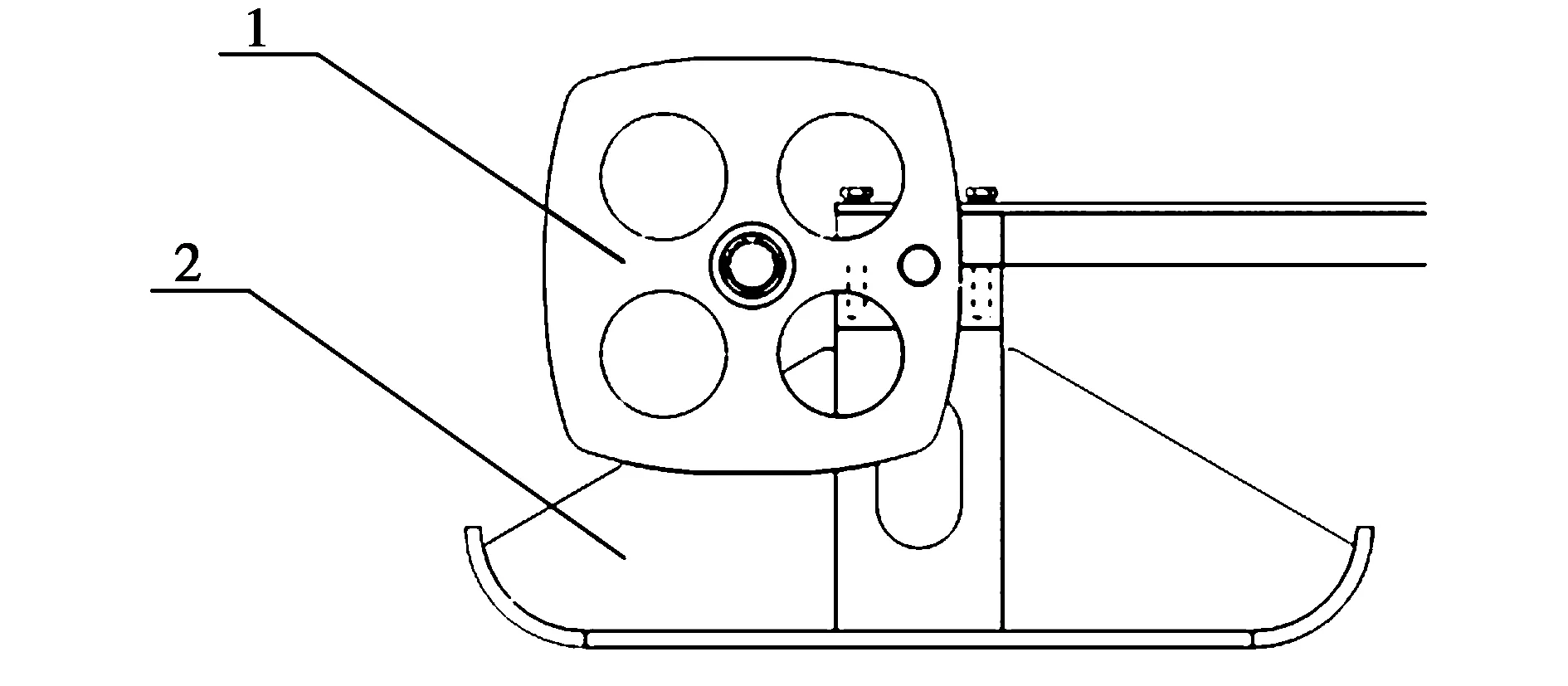
根据以往的曲轴设计常分为整体式和组合式两大类,为了方便安装步行割灌机,采用组合式曲轴,曲轴的材料选用45钢,曲轴的结构示意图如图7所示。

1.轴套 2.端轴 3.曲柄 4.销轴 5.隔套 6.中间轴 7.凸轮 8.输入轴1.The collar 2.End shaft 3.The crank 4.The pin 5.Spacer tube 6.Intermediate shaft 7.The Cam 8.Input shaft图7 曲轴结构图Fig.7 The crankshaft structure
3 步行割灌机行走机架设计
行走部分机架(如图8所示)是由不同的方钢管焊接和折弯而成,它的功用是支撑步行机构和连接各个零件,可以缓冲行走过程中步行机构的震动。
1.行走机架 2.离合器托架 3.汽油机后托板 4.汽油机前支板 5.肋板1.Walking frame 2.The clutch bracket 3.The plate after the gasoline engine 4.The plate before gasoline engine 5.Floor图8 步行割灌机行走部分机架Fig.8 The frame of walking part of walking brush breaker
选择方钢管的优势在于本身机器的承载重力小,而且价格也较便宜,适合在质量小的机器上使用,而且具有足够的刚度,良好的抗震性,可以尽量减小热变形和内应力,防止步行机在运动过程中发生形变。在机架的上部有汽油机前支板、汽油机后托板、离合器托架和肋板。汽油机前支板主要是对汽油机的一种支撑,汽油机后托板主要是托住汽油机,起到固定汽油机的作用。
前后导杆系主要是起着连接的作用,它的上部即是驾驶平面,下部则是行走机架。
离合器托架是用于托住离合器,将离合器固定在行走机架上。
4 步行割灌机控制机构选用
由操作者控制步行割灌机的起步、停止、转弯和越障,将市场买的农用机器的扶手作为步行割灌机的控制装置,在割灌作业过程中,起步、停止、转弯和越障等功能可以有操作者通过扶手进行控制[15]。本次设计在控制方向方面选择用牙嵌式离合器,牙数一般取值在3~60,如图9所示为步行割灌机控制元件图[16]。

1.离合器固定端 2.离合器滑动端 3.平键 4.下滑动轴 5.上滑动轴 6.拨叉1.The fixed end of the clutch 2.The clutch sliding side 3.The flat key 4.The drop shaft 5.Sliding shaft 6.Fork图9 步行割灌机控制元件图Fig.9 Control components of walking brush breaker
牙嵌式离合器通过两个相互嵌合的半离合器牙齿嵌合传递动力,由于该离合器牙齿结构的特殊性,其齿在结合过程中受到滑动端与固定端的转速差影响较大,因此简要分析离合器在结合过程中的4个阶段。
从图10(a)可以看出,离合器滑动端在操纵力的作用下与固定端的齿顶面相接触,在转速差的作用下逐渐向固定端的牙槽伸进,该阶段为接合的初期。
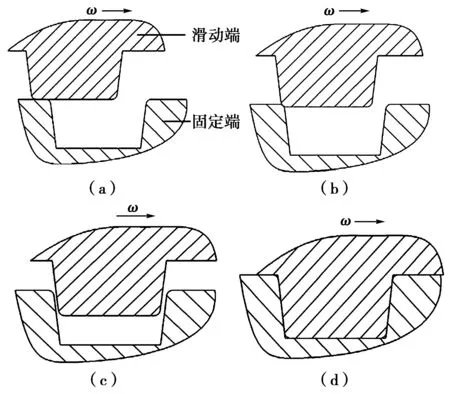
图10 离合器结合过程Fig.10 Clutch combination process
从图10(b)可以看出,滑动端的齿顶面滑过固定端的侧面,逐渐开始向牙槽靠近。
从图10(c)可以看出,滑动端的齿顶面已经开始进入固定端的牙槽内。
从图10(d)可以看出,滑动端的齿顶面已经完全进入固定端的牙槽内。
离合器滑动端的齿顶面在操纵力的作用下与固定端相互接触时有摩擦力产生,因此,二者的转速差也逐渐减小,假设在这段时间内操纵力大小不变,则可以计算滑动端的摩擦转矩,图11为齿顶面受到摩擦的示意图。

图11 齿顶面摩擦示意图Fig.11 Addendum surface friction
图11中ω为牙嵌式离合器的角速度;φ2为从动件牙顶面过渡圆角两侧起点对应的圆心角;α0为滑动端的齿顶面的起点与固定端侧面圆角起点对应的角度。
对滑动端进行摩擦转矩的动力学微分方程[17-19]:

(4)
对公式(4)进行二次微分方程:

(5)
式中:α0为滑动端的齿顶面的起点与固定端侧面圆角起点对应的角度;ω0为所对应的角速度。
由公式(4)可以推出角度差为:

(6)

5 结论与讨论
根据步行割灌机行走部分的行走原理对其行走部分进行了设计,分析行走部分每一个部件的功用及原理,分析行走机构行走原理,对曲轴、行走机架以及离合器控制机构进行设计分析,设计出了参数合理的曲轴及离合器控制机构,确定了割灌机行走部分的整体布局。
传统的轮结构和履带结构的机械设备,它们在爬山的过程中已将一部分动力耗费掉,剩余的动力也就不足以满足剩下的割灌,该行走部分已实际应用于割灌机中,可大大提高割灌机的工作效率与质量,使得割灌机的爬山和自主作业功用能够并行实现。但步行割灌机主要是用于林区割灌,如果想要作为家庭用的小型割草机及园用的草坪收割机,其质量偏大且不够灵活,因此,考虑降低其质量是下一步需要完善的问题。
[1]梁桂清.我国割灌机的现状和发展前景[J].广西机械,2000(1):24-26.
[2]顾正平,沈瑞珍.国内外园林绿化机械现状与发展趋势[J].林业机械与木工设备,2004,32(2):4-8.
[3]王燕,王述洋.割灌机械发展现状及趋势[J].林业机械与木工设备,2007,35(10):4-6.
[4]蔡岩.割灌机安全维护三要点[J].中国花卉报,2010,7:1-2.
[5]王爽,齐英杰,宋春红.基于ANSYS的步行割灌机减震机构设计及研究[J].木材加工机械,2014,(5):1-4.
[6]刘冬梅,杨杭旭.基于ADAMS的步行爬坡机仿真分析[J].林业机械与木工设备,2014,42(12):38-40.
[7]洪庆,曲跃军,刘影,等.山地步行式拖拉机及造林机具的研究[J].林业机械与木工设备,2015,43(7):24-25.
[8]Grand C,Amar F B,Plumet F,et al.Stability and traction optimization of a reconfigurable wheel-legged robot[J].International Journal of Robotic Research,2004,23(10-11):1041-1058.
[9]李宁,余国胜.灌木收割机理及装备研究[J].安徽农业科学,2009,37(4):1862-1864.
[10]王忠.平行四边形机构的拓展及其应用[J].机械设计,2005,22(12):57-58.
[11]王知行.机械原理[M].北京:高等教育出版社,1999.
[12]尹静,马岩.林间步行机器人脚凸轮减震系统研发[J].木材加工机械,2010,20(6):27-30.
[13]刘静,赵晓光,谭民.腿式机器人的研究综述[J].机器人,2006,28(1):81-88.
[14]董立涛,刘荣昌,王庆祝,等.曲轴的强度研究方法与曲轴疲劳寿命的提高[J].拖拉机与农用运输机,2004(4):18-20.
[15]许汶祥.新型割灌机的设计研制[J].林业机械与木工设备,2002,30(2):11.
[16]蒋开苏.割灌机离合器工作特性的研究[J].中南林学院学报,1995,15(2):122-127.
[17]郭占正,张喆玉,张建峰,等.牙嵌式离合器速差特性研究[J].机械传动2013,37(5):93-96.
[18]杨春梅,杨博,宋文龙.林间小型履带采伐机驱动轮的设计与分析[J].林业科技,2015,40(2):32-34.
[19]马岩,杨春梅,张明松,等.轻便型履带式风力灭火机行走机构的设计及爬坡实验验证[J].森林工程,2014,30(6):55-58.
Walking Structure Design and Research of Walking Brush Breaker
Yang Chunmei ,Guo Minghui,Ma Yan,Wang Shuang
(College of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040)
In order to find out the small devices which can satisfy climbing and do autonomous task at present,this article puts forward a kind of walking part design of the walking brush breaker.It has clarified the working principle and structural design of the new walking brush breaker,as well as design parameters of the walking structure,walking frame and control structure in details.The structure transport the power is passed on to the input shaft of crankshaft,then the power transmission also by the input shaft to the cam and the cam driven legs to walking forward.The diameter of a crankshaft principal axis,length and crank are set,it chooses the combined crankshaft and takes in the cam structure to shock absorption.It uses two feet to connect the junction plate,in order to constitute a pair of approximate parallelogram walking structure.The structure has good structure stability,strong maneuverability and spanning capacity.The square steel tube has the characteristics of bearing small gravity and enough stiffness,good vibration resistance,so it is applied to walking part of the frame and uses the crankshaft to connect with the walking structure.The claw coupling is used in the control structure,based on the claw coupling engaging process,the friction torque is analyzed,and the diameter of control structure is designed.Until now,the reasonable parameters of the crankshaft and clutch control mechanism have been designed and the walking part of walking brush breaker overall layout has been ascertained.Finally,make the walking part used in walking brush breaker,so the reasonable mountain climbing structure has obtained.The result shows that this design can make the brush breaker’s climbing and autonomous task function has achieved.
brush breaker;climbing structure;walking structure;structure design
2016-02-15
国家林业行业公益专项资助(201504508)
杨春梅,副教授,博士。研究方向:林业机械设备方面的研究。E-mail:ycmnefu@126.com
杨春梅,郭明慧,马岩,等.步行割灌机行走部分结构设计与研究[J].森林工程,2016,32(5):48-54.
S 776.21+1
A
1001-005X(2016)05-0048-07
猜你喜欢
机械工程师(2021年4期)2021-04-19
装备制造技术(2019年12期)2019-12-25
设备管理与维修(2019年22期)2019-12-19
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2019年4期)2019-04-04
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年5期)2018-01-19
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
油气田地面工程(2014年5期)2014-03-09
