基于人车环境协同的车辆弯道行驶安全预警系统
2016-10-10 08:20赵树恩李玉玲
北京工业大学学报 2016年1期
赵树恩,屈 贤,李玉玲
(重庆交通大学机电与汽车工程学院,重庆 400074)
基于人车环境协同的车辆弯道行驶安全预警系统
赵树恩,屈 贤,李玉玲
(重庆交通大学机电与汽车工程学院,重庆 400074)
为了解决车辆弯道行驶安全问题,在虚拟仪器LabVIEW开发环境下设计了一套基于人车环境协同的车辆弯道行驶安全预警系统.通过分析影响车辆行驶安全性的人、车、路、环境等因素,运用层次分析法和权的最小平方法建立基于人-车-路-环境的车辆行驶安全度静态综合评价体系;引入安全系数k,结合车辆行驶安全临界车速和车辆行驶安全度评价模型,构建基于人车环境协同的车辆弯道行驶安全预警模型,运用TruckSim仿真验证了模型的有效性.在虚拟仪器LabVIEW开发环境下,设计了一套车辆弯道行驶安全预警系统,并进行了仿真验证.结果表明:该预警系统可对驶入弯道且有危险的车辆进行预警,能有效提高车辆行驶安全性.
行驶安全;弯道;虚拟仪器;预警系统
车辆在弯道行驶时,往往会因为车速过高而发生车辆侧翻、侧滑等危险状况.据统计,70%以上的重特大交通事故均发生在视距不良、路侧险要、技术指标较低的弯道路段上[1].因此,对车辆转弯安全性进行研究可有效提高车辆行驶安全性,减少交通事故的发生.
目前,国内外学者针对车辆安全预警进行了大量研究,取得了较丰硕的研究成果.张德兆等[2]结合弯道曲率、驾驶员特性及车辆动力学性能等参数计算弯道最大安全车速,通过引入风险状态预估函数对弯道车辆的安全状态进行判断,但未考虑环境因素对车辆安全性的影响.余贵珍等[3]研究了车辆弯道防侧翻预警算法,通过硬件在环驾驶模拟试验台对该算法的有效性进行了验证.郭烈等[4]结合安全车速和车辆运动学模型,设计了直道制动减速阶段的速度控制器,试验结果表明:该控制器可以有效避免侧翻侧滑等危险状况.于志新[5]建立了重型车三自由度车辆模型,设计了一套重型车辆侧翻预警系统,验证了系统的有效可靠性.Lee等[6]基于地图数据库和车辆定位设备研究了一种弯道车速控制系统.上述研究很少有人考虑人、车、环境等因素对车辆行驶安全性的影响,不能较准确地对车辆行驶安全状态预警.
本文结合车辆动力学原理和基于人-车-路-环境的车辆行驶安全度,建立基于人车环境协同的车辆弯道行驶安全预警模型,在此基础上,基于虚拟仪器设计车辆弯道行驶安全预警系统.
1 基于人-车-路-环境的车辆行驶安全度综合评价
1.1车辆行驶安全度评价体系
人、车、路、环境是影响车辆行驶安全度的四大主要因素,它们之间既相互关联又相互制约.考虑到影响因素的不确定性和复杂性,对影响车辆行驶安全度的人、车、路、环境等因素进行多层次分析,通过对车辆行驶安全性影响因素的分析和文献[7]建立如表1所示的多层次车辆行驶安全度综合评价指标体系.
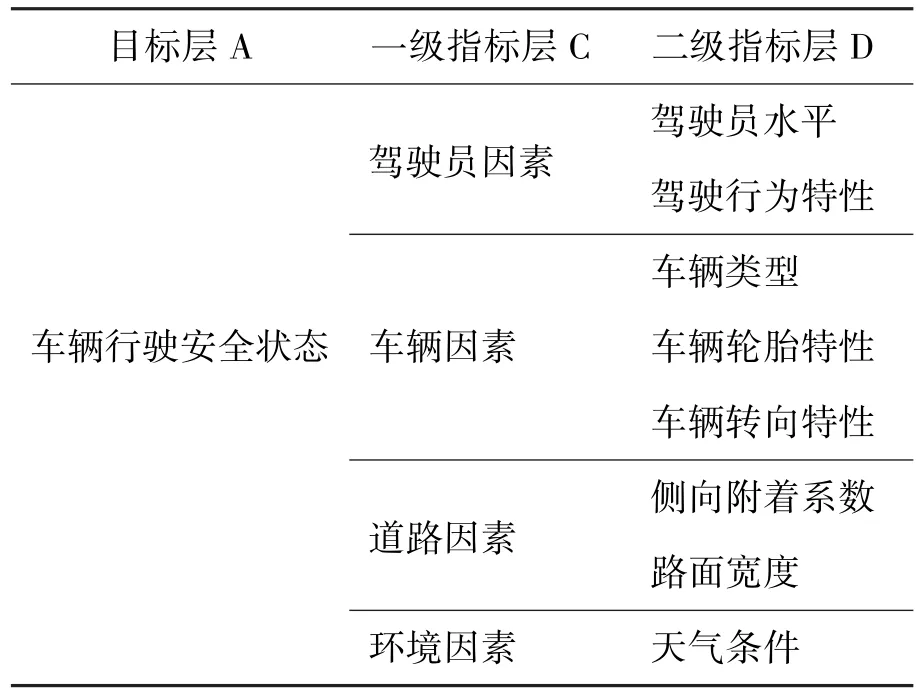
表1 车辆行驶安全度综合评价指标体系Table 1 Level hierarchical structure of vehicle driving safety degree
1.2评价指标的量化
驾驶员行为特性受驾驶员心理、生理综合条件的影响最为重要.根据症状自评量表SCL90[8],将驾驶员行为特性分为5个等级:1级代表驾驶员没有焦虑、疲劳症状;2级表示有点症状,但表现并不明显;3级表示有症状,表现程度为轻到中度;4级表示有症状,其程度为中到严重;5级表示症状的频度和强度十分严重.车辆因素包括车辆轮胎性能、转向助力特性、车辆类型等.按胎压将车辆轮胎特性分为5个等级,按转向助力压力将转向助力特性分为5个等级,按车辆尺寸将车辆类型分为大货车、大客车、小货车、小客车和轿车等5类.道路指标包括侧向附着系数和路面宽度2部分.根据《公路工程技术标准》[9]和《公路路线设计规范》[10],则各评价指标相对应的评分准则见表2.
1.3基于权的最小平方法的综合评价模型
1.3.1综合评价模型
人-车-路-环境对车辆行驶安全度的影响是相互独立的.因此,采用线性模型对其进行综合评价
1.3.2权重系数的确定
本文采用权的最小平方法确定权重,该方法是由Chu等[11]于1979年提出的层析分析法中一种较新的排序方法,其基本思想是用对判断矩阵(非一致矩阵)A=(aij)在约束条件∑ωi=1,ωi>0下,用极小化解ωθ=(ω1ω2ω3… ωm)T作为排序权向量[11].
构造拉格朗日函数L(ω,λ)
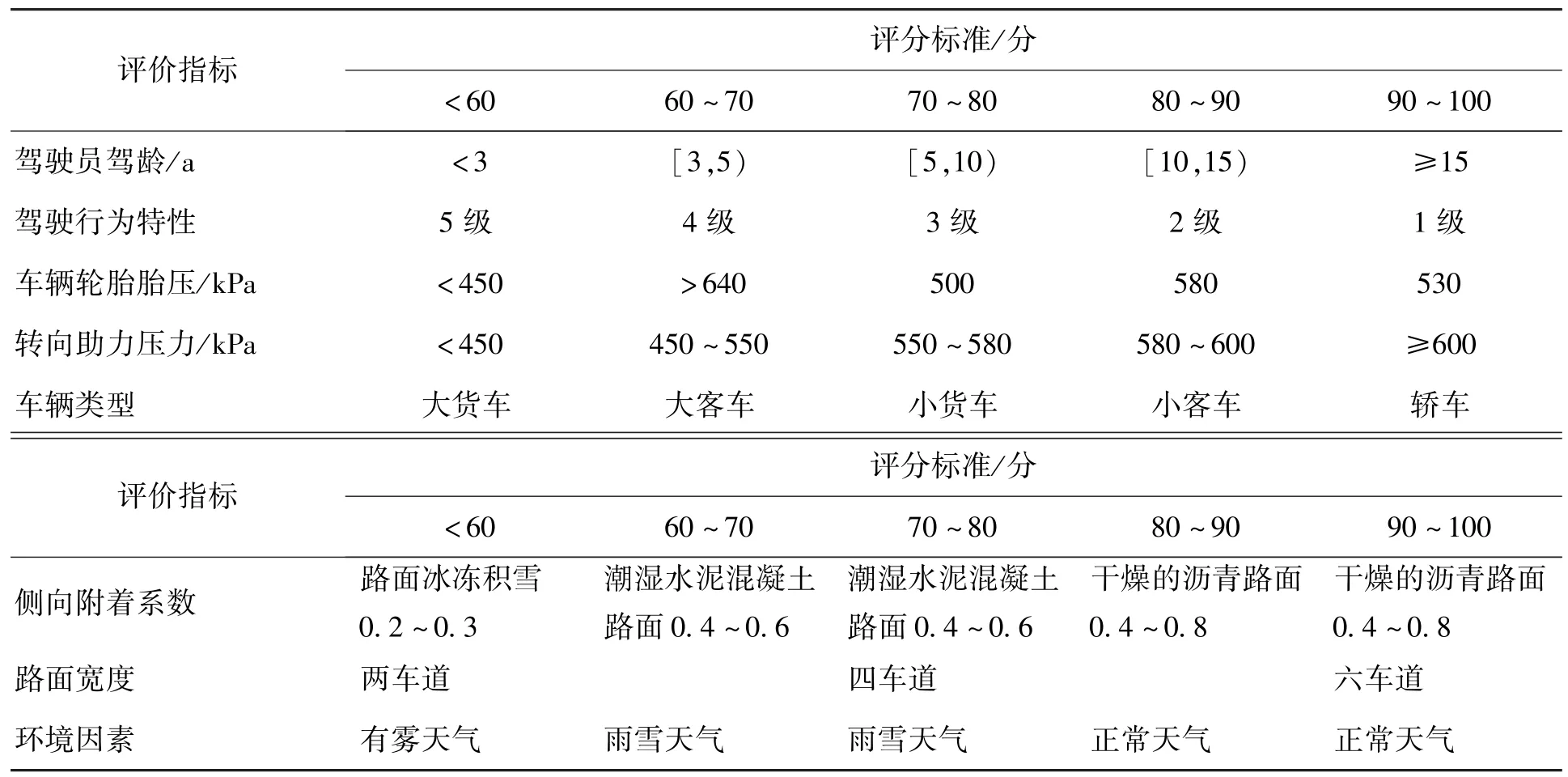
表2 评价指标的评分准则Table 2 Scoring criteria of evaluation index
对式(3)进行整理,用矩阵形式表示为
与式(4)结合,整理可得ωθ为
式(5)求权重的方法称为权的最小平方法,其中
判断矩阵(非一致矩阵)A=(aij),采用Saaty教授[13]提出的“1~9标度法”来构造.判别标准见表3.
以影响车辆行驶安全的人、车、路、环境4个因素作为准则层评判因子,采用权的最小平方法对各影响因素进行权重分配.根据表3,对指标重要性两两比较,得判断矩阵为
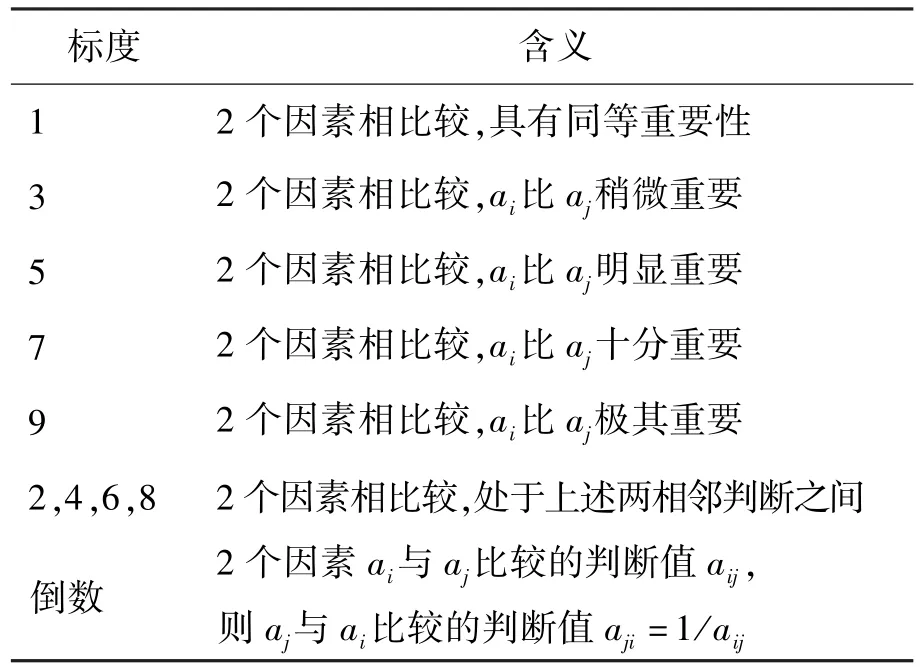
表3 “1~9”评判标度准则Table 3 “1~9”evaluation criteria scale
利用式(6)求出矩阵C,及其逆矩阵为
所以则基于权的最小平方法的准则层各影响因素权重分配为
同理,可得指标层评价指标权重分配,如表4所示.
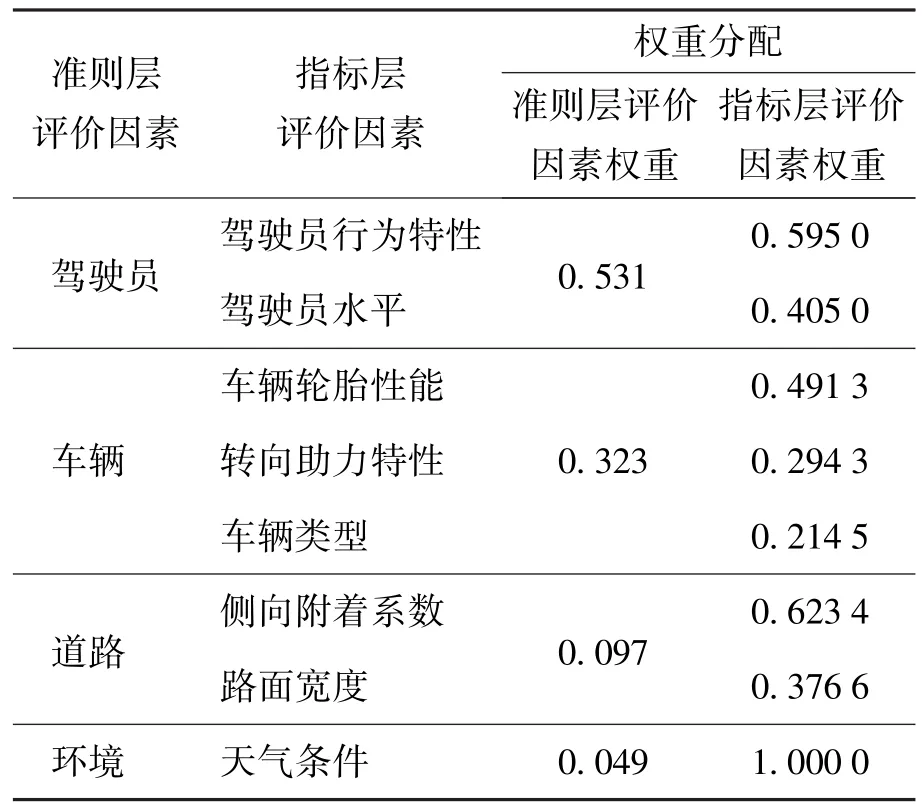
表4 各指标因素权重分配Table 4 Weight distribution of factors
1.3.3评价模型的确定
结合以上分析,则基于权的最小平方法构建的车辆行驶安全度综合评价模型为
式中xi为驾驶员、车辆、道路、环境等因素的评分.
驾驶员因素评价模型
车辆因素评价模型
道路因素评价模型为
环境因素评价模型为
夜间行驶条件比白天差,为了更准确地表现夜间环境条件,在白天环境基础上乘以系数0.8.式中:为驾驶员行为特性评分;为驾驶员水平评分;为车辆轮胎特性评分;为转向助力特性评分;为车辆类型评分;为侧向附着系数评分;为路面宽度评分.
2 基于人车环境协同的安全预警模型
2.1基于车辆动力学的弯道行驶安全车速
2.1.1侧滑极限工况下的车速计算
当地面提供的摩擦力不足以平衡车辆重力和离心力的侧向合力时,汽车就会发生侧滑.图1为汽车在有横坡路面转弯行驶时的车辆受力图.
当汽车有向外侧滑移的倾向时,路面法向和切向平衡方程[14]为
式中:N1、N2为车轮垂直力;m为汽车总质量;g为重力加速度;Ff为侧向附着力;Fj为转向时所受离心力.其中
式中:v为汽车转向速度;R为汽车转向半径;φy为侧向附着系数.
侧滑发生的临界条件为
联合式(12)(13)(14)得侧滑临界速度为
由于横坡角度很小,用横坡度值代替坡度角,tan θ=sin θ=ih.则
式中ih为横坡度值.
2.1.2侧翻极限工况下的车速计算
如图1所示,汽车在弯道转弯时,当内侧车轮N1=0时,汽车将发生翻滚,则
将式(13)代入式(17),则在有横坡路面转弯时发生侧翻的临界速度为
式中:b为汽车轴距;hg为质心高度.
结合式(16)(18),则基于车辆动力学的车辆弯道行驶安全速度模型为
2.2基于人车环境协同的安全预警模型
考虑到车辆行驶安全性受驾驶员、车辆、道路和环境等因素的综合影响,本文在基于车辆动力学的安全行驶速度模型的基础上,引入一个能够反映车辆行驶安全静态综合因素的安全系数k,从而实现车辆行驶安全度静、动态影响因素的协同与耦合.安全系数k是运用SAS软件[15-16]进行逐步回归分析得到的.具体操作步骤为:1)制作变量间的散点图,寻求变量间的相关性;2)确定变量间可能的函数形式;3)对变量进行回归分析,确定回归方程.经过大量模拟验算及验证,最后确定k值为
式中y是由式(7)得出车辆安全行驶安全度.结合式(19)(20),可得基于人车环境协同的车辆弯道行驶安全预警模型为
3 预警模型验证
本文运用商业软件TruckSim对车辆安全预警模型进行仿真分析[17-18],选取客车为实验对象,设定仿真环境为天气状况晴朗、路面干燥;驾驶员具有3 a驾驶经验,身体健康,依据症状自评量表SCL90评估,驾驶员心理、生理状况欠佳,为3级;车型选择客车,车龄6 a,各方面性能一般;平坦沥青路面,双向二车道,行驶道路弯道居多.客车和道路的主要参数如表5所示.
通过构建2条由200 m直道和2个半径不相同的弯道组成的沥青路面环形跑道对车辆行驶安全车速仿真分析,其中弯道半径分别设置半径为40、60 m.图2为弯道半径为40 m的道路模型.
速度匀速变化的客车在通过环形跑道时车辆发生侧偏、侧翻的速度即为仿真得到的车辆临界安全车速.图3为车辆速度变化图.图4为车辆偏离轨道的横向位移l变化图.
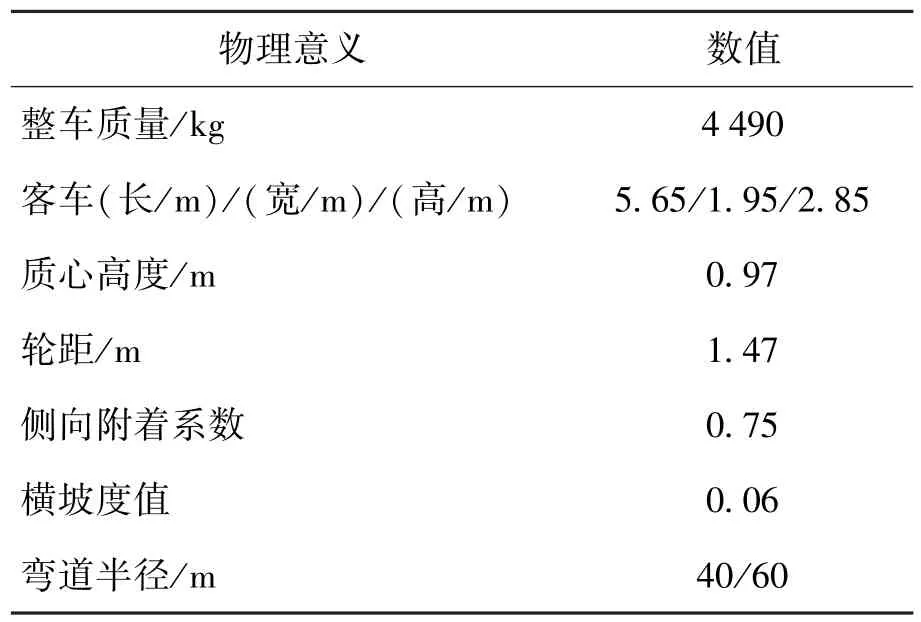
表5 道路和车辆的主要参数Table 5 Main structural parameters of vehicle and road
从图3、4可以看出,车辆驶入弯道后,车辆严重偏移车道线,发生侧滑危险.
通过软件仿真得到车辆横向失稳的阈值与基于车辆动力学模型(式(19))和基于人车环境协同的预警模型(式(21))求出的阈值见表6.
从表6可以看出,预警模型计算的车辆安全临界速度相对动力学模型计算的速度相对保守,预警时能够给驾驶员提供充足的反应及操作时间.相对于仿真速度模型,预警模型计算的安全临界速度与其相近,模型具有有效性和可靠性.
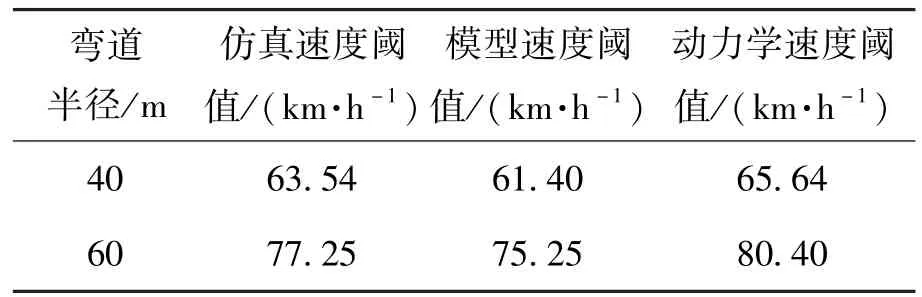
表6 速度阈值比较Table 6 Speed comparison
4 预警系统设计
结合安全预警模型,在虚拟仪器LabVIEW开发环境下,设计了一套基于人车环境协同的车辆弯道行驶安全预警系统.该系统包括前面板设计和后面板程序框图搭建.其中,前面板主要包括参数设置、控制按钮、数据显示等模块;程序框图用于放置图形化代码,表述程序运行状态,主要包括车辆行驶安全度模块、安全车速计算模块、预警模块等.预警系统的程序框图如图5所示.
针对上述仿真条件,将驾驶员信息、车辆基本参数、道路环境等参数信息输入预警系统前面板.车辆在半径为40 m的转弯安全行驶和危险行驶时对应的前面板分别如图6、7所示.
从图6可以看出,车辆实际行驶速度55 km/h小于安全车速61.4 km/h,显示屏提示“车辆行驶安全!”报警灯不报警,显示为绿色.
从图7可以看出,车辆实际行驶速度62 km/h大于安全车速61.4 km/h,显示屏提示“车速过高,危险!请减速慢行!”,报警灯报警,显示为红色.综上所述,设计的预警系统可实时显示安全车速,准确对车辆行驶安全状态进行判断预警.
5 结论
1)运用车辆动力学原理建立车辆弯道行驶安全临界速度模型,引入安全系数k,结合基于权的最小平方法的车辆行驶安全度,建立了基于人车环境协同的弯道车辆安全行驶预警模型.
2)结合安全预警模型,在虚拟仪器LabVIEW环境下设计了车辆弯道行驶安全预警系统.仿真结果表明:该预警系统可给予驾驶员危险警示,具有较好的可操作性,对减少交通事故的发生具有较大的现实意义.
[1]董红召.车路集成环境下车辆防撞预警安全状态判别模型的研究[J].汽车工程,2011,33(9):778-780. DONG H Z.A research on safety status identification modelforvehiclecollisionwarningundervehicle infrastructureintegrationcondition[J].Automotive Engineering,2011,33(9):778-780.(in Chinese)
[2]张德兆,王建强,李升波,等.基于风险状态预估的弯道防侧滑超速预警系统[J].公路交通科技,2009,26(增刊1):44-48. ZHANG D Z,WANG J Q,LI S B,et al.Risk prediction based curve anti-sideslip speed warning system[J]. Journal of Highway and TransportationResearchand Development,2009,26(Suppl 1):44-48.(in Chinese)
[3]余贵珍,李芹.车辆弯道行驶侧倾稳定性分析与侧翻预警研究[J].北京工业大学学报,2014,40(4):574-579. YU G Z,LI Q.Roll stability and early-warning of vehicle driving in the curve[J].Journal of Beijing University of Technology,2014,40(4):574-579.(in Chinese)
[4]郭烈,黄晓慧.汽车弯道防侧滑/侧翻控制器设计[J].大连理工大学学报,2013,53(4):579-585. GUO L,HUANGXH.Sideslip/rolloveravoidance controller design for vehicle driving on curve lane[J]. Journal of Dalian University of Technology,2013,53 (4):579-585.(in Chinese)
[5]于志新.重型车辆侧翻预警系统的开发[J].计算机测量与控制,2012,20(9):2523-2528. YU Z X.Development of rollver warning system for heavyduty vehicles[J].Computer Measurement Control,2012,20(9):2523-2528.(in Chinese)
[6]LEE Y H,DENG W.A simulation study of vehicle curve speed control system[C]∥2006 International Mechanical Engineering Congress and Exposition.New York:ASME,2006:163-171.
[7]陈红,周继彪.公路隧道运行环境安全评价指标与方法[J].长安大学学报(自然科学版),2013,33(4):55-56. CHEN H,ZHOU J B.Safety evaluation indexes and method for traffic environment of highway tunnels[J]. Journal of Changan University(Natural Science Edition),2013,33(4):55-56.(in Chinese)
[8]吴旷怀.道路工程[M].北京:中国建筑工业出版社,2012:121-135.
[9]ABUT H,HANSEN J.DSP for In-vehicle and mobile systems[M].Boston,USA:Springer,2005:179-193.
[10]中建标公路委员会.公路工程技术标准:JTG B01—2014[S].北京:人民交通出版社,2014.
[11]CHU A T W,KALABA R E,SPINGARN K.Comparison of two methods for determine the weights of belonging to fuzzy sets[J].Journal of Optimization Theory and Application,1979,27(4):531-538.
[12]中交第一公路勘察设计研究院.公路路线设计规范:JTG_D20-2006[S].北京:人民交通出版社,2006.
[13]SAATY T L.Fundamentals of decision making and priority theory[M].Pittsburgh:RWS Publication,2000.
[14]杜栋,庞庆华.现代综合评价方法与案例精选[M].北京:清华大学出版社,2008:101-110.
[15]余志生.汽车理论[M].北京:机械工业出版社,2009:205-300.
[16]冯力.回归分析方法原理[M].北京:中国金融出版社,2004:180-215.
[17]宋马良.基于单目视觉的弯道行车预警研究[D].昆明:昆明理工大学,2013. SONG M L.Research on curve driving warning based on monocular vision[D].Kunming:Kunming University of Science and Technology,2013.(in Chinese)
[18]NAKAOLA M,PONGSATHOM R,NAGAI M.Study on forwardcollisionwarningsystemadaptedtodriver characteristicsandroadenvironment[C/OL]∥International Conference on Control,Automation and Systems 2008.[S.l.]:IEEE,2008:2890-2895[2015-10-14].http:∥ieeexplore.ieee.org/xpl/articleDetails. jsp?arnumber=4694250.Doi.10.1109/ICCAS.1008. 4694250.
(责任编辑 郑筱梅)
Curve Driving Safety Warning System for Vehicle With Driver-vehicle-environment Synergy
ZHAO Shuen,QU Xian,LI Yuling
(College of Mechanical&Automobile Engineering,Chongqing JiaoTong University,Chongqing 400074,China)
To solve the driving safety warning problem of vehicle on curve roads,a driving safety warning system of vehicle on curve roads based on driver-vehicle-environment synergy was designed with LabVIEW.The multi-level static comprehensive evaluation index system for driving safety was established by AHP and weighted least squares method.Meanwhile,the static factors of driver,vehicles,roads,environment impacting on safety were considered.The safety speed on curve based on vehicle dynamics and safety degree evaluation model were combined by the safety coefficient k.Then,the warning model based on driver-vehicle-environment synergy was built.The validity of model was verified with TruckSim.Finally,the driving safety warning system of vehicle on curve roads based on LabVIEW was designed.Besides,the system was simulated.The results show that the warning system can judge and warn whether the vehicle is in safe or not when driving on curved roads.And it can improve the safety of the vehicle effectively.
driving safety;curve;virtual instrument; warning system
U 46
A
0254-0037(2016)01-0112-07
10.11936/bjutxb2015020042
2015-02-27
重庆市科委科研资助项目(cstc2014jcyjA6007);国家博士后基金资助项目(2014M562259,XM2014084);山地城市交通系统与安全重庆市重点实验室开放基金资助项目(KTSS201305)
赵树恩(1972—),男,教授,主要从事车辆系统动力学及综合控制、道路交通安全技术方面的研究,E-mail:zse0916@163.com
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
民用飞机设计与研究(2020年4期)2021-01-21
海峡姐妹(2020年8期)2020-08-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年11期)2019-07-04
电子制作(2019年10期)2019-06-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车与安全(2016年5期)2016-12-01
汽车维护与修理(2015年5期)2015-02-28