
无接触供电在导轨式自动导向小车的研究
2016-10-10 09:21刘衡祁
中国科技纵横 2016年14期
刘衡祁
(武汉理工大学 自动化学院,湖北武汉 430070)
无接触供电在导轨式自动导向小车的研究
刘衡祁
(武汉理工大学 自动化学院,湖北武汉 430070)
随着工业化进程的日益推进,对物料传送设备的自动化水平要求越来越高,自动导向小车(Automated Guided Vehicle, AGV)因其高柔性、易扩展等优点而得到了迅猛发展和广泛应用。AGV由于采用可充电蓄电池供电,因此使用就受到蓄电池固有缺陷的制约,在线工作时间受到极大的限制,导致AGV的利用率下降。本项目以工业物料输送系统中典型的自动导向小车(AGV)为应用对象,阐述了无接触供电技术的基本原理、发展过程以及研究现状,探讨了将无接触供电技术应用到AGV的可行性和优势。
AGV 无接触供电 应用
随着工业化进程的日益推进,对物料传送设备的自动化水平要求越来越高,自动导向小车(Automated Guided Vehicle, AGV)因其高柔性、易扩展等优点而得到了迅猛发展和广泛应用。AGV由于采用可充电蓄电池供电,因此使用就受到蓄电池固有缺陷的制约,在线工作时间受到极大的限制,导致AGV的利用率下降。随着工业自动化的发展,自动化物料输送装备对供电技术提出了更高的要求,传统供电方式由于其固有的局限性已经难以满足新的要求。而无接触供电技术(CPS)依靠其安全、可靠、高效、灵活等特点,适应了物流自动化发展的最新要求。
1 项目的研究内容
1.1 感应式耦合无线电能传输机理(ICPT)
ICPT是以耦合的电磁场为媒介实现电能传递,对于AGV用ICPT,是将耦合线圈原边导轨、副边绕组分置于车外地面上和车内底盘上,通过高频磁场的耦合传输电能。该系统主要由发射部分、感应耦合和接收部分组成。其原理如图1所示。发射部分从电网获取电能后经过整流滤波获得直流电,进入逆变器中进行高频逆变,产生的高频交变电流在信号控制电路的控制下经过一次侧谐振电路后注入原边导轨,在临近空间产生高频交变磁通;位于车底盘的副边绕组在靠近原边导轨空间通过感应耦合高频交变磁通获取感应电动势,同时在信号控制电路的控制下经过整流滤波以及稳压调节,从而实现为AGV提供电能。此系统本质上相当于变压器的疏松耦合系统,其一次侧、二次侧之间通过电磁感应实现电能传输,因气隙导致的耦合系数的降低,可以由提高一次侧输入电源的频率加以补偿。AGV感应式耦合无接触供电系统示意图如图2。
1.2 松耦合变压器等效模型
AGV感应耦合无接触供电系统的耦合线圈相当于一个松耦合变压器,变压器的一侧放在地面,另一侧安装在车底盘上,通过中间几十厘米的距离传输能量。由于原副边距离较大,所以耦合系数非常小,不同于传统的紧耦合变压器,AGV的耦合线圈具有较大的漏感。
描述松耦合变压器的模型有漏感等效模型和互感等效模型,漏感等效模型如图3所示。
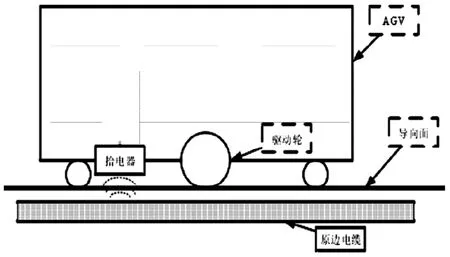
图2 AGV无接触供电系统结构
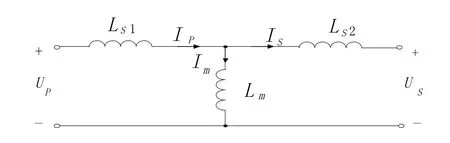
图3 松耦合变压器的漏感模型
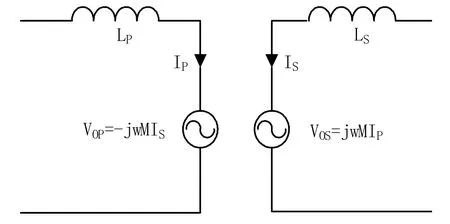
图4 松耦合变压器的互感模型
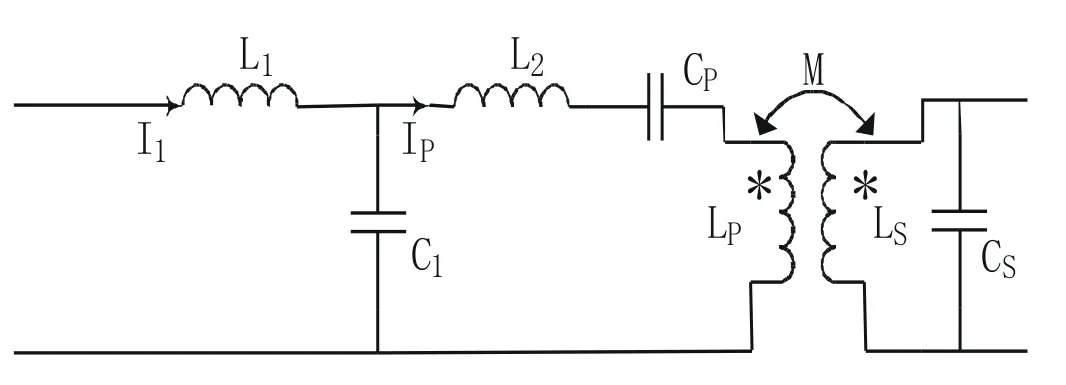
图5 原边LCL副边LC并联的拓扑结构图
如图3所示,忽略变压器原、副边绕组的等效电阻。Ls1和Ls2为原副边漏感值,Lm为励磁电感,漏感等效模型将漏感和励磁电感分开来分析。
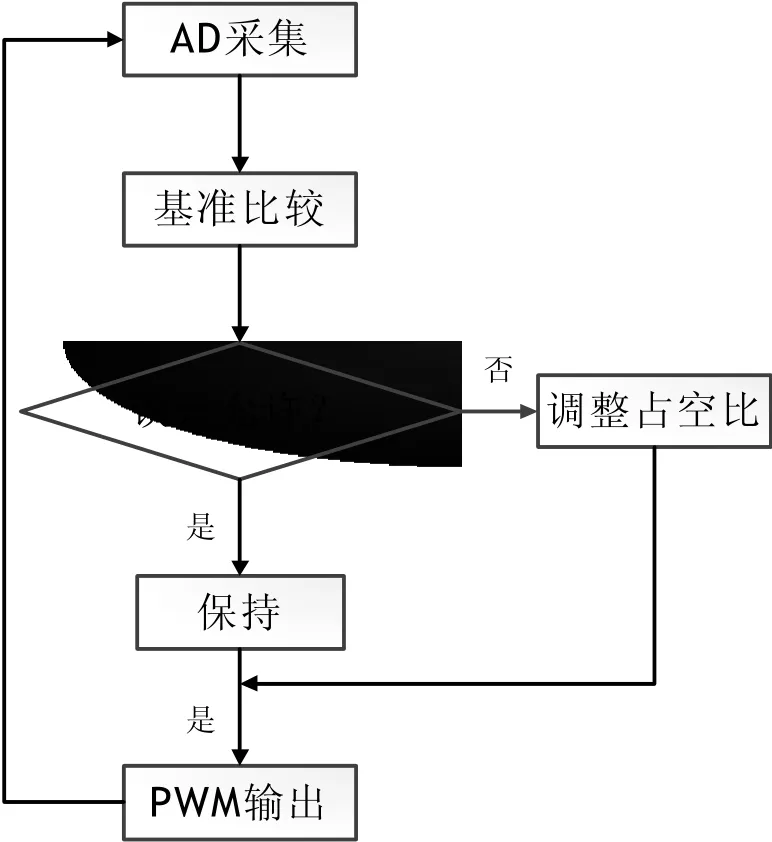
图6 程序流程图
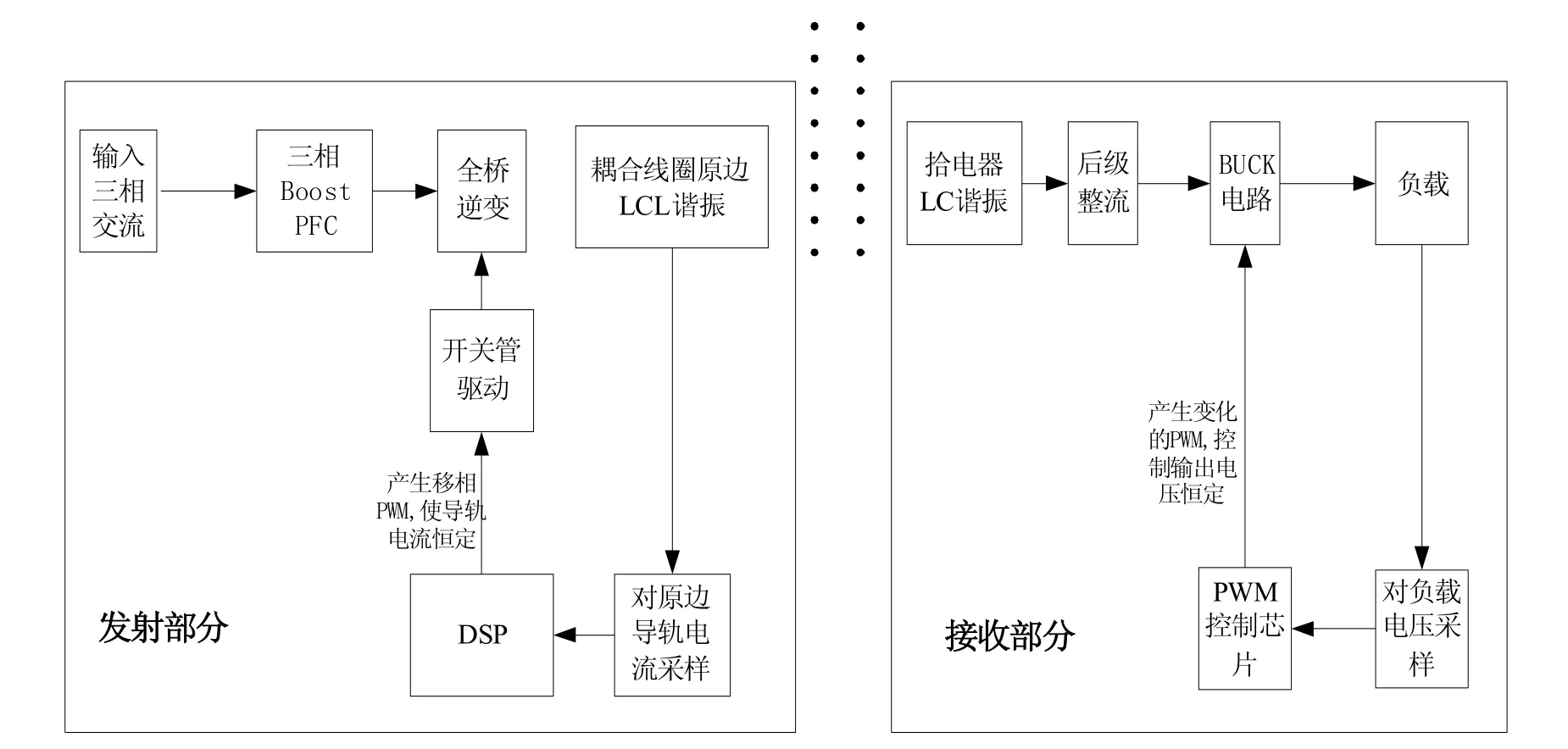
图7 实施方案
松耦合变压器的互感等效模型如图4所示。
忽略变压器原、副边绕组的等效电阻。Lp与Ls分别为原、副边自感,M为互感,-jωMIs为副边磁场在原边的感应电压,jωMIp为原边磁场在副边的感应电压。通过互感模型对松耦合变压器解耦,可以对原副边单独进行分析。
从磁的角度分析,两个模型的主要区别在于计算中的磁通划分不同;从电感的角度分析,漏感等效模型侧重对漏感和激磁电感的分析,互感等效模型侧重对互感和自感的分析,用互感来描述变压器原、副边的耦合关系,而在系统设计时,需要对原副边自感整体分析进行电容补偿,因此互感等效模型不将励磁电感和漏感分开讨论。因此采用互感等效模型对耦合线圈进行分析相对简单。
1.3 原边LCL副边LC并联的补偿拓扑结构
如图5所示,电感L1、L2和电容C1构成LCL结构,当L1和C1的谐振频率等于开关频率时,流过原边导轨的电流Ip为恒定的正弦,不受负载和耦合系数变化的影响,使得副边有稳定的电能,便于给AGV供能。电容Cp与Lp串联,可以减小无功功率,提高电路整体的功率因数。副边电容Cs和自感Ls谐振,在合适的参数设计下,可以很好地实现软开关,减小开关损耗,提高整体电路效率。因此,决定采用LCL和LC并联的方式。
1.4 基于DSP控制的原边恒流
为了满足将来实用AGV无接触供电系统的性能需求,项目目前拟采用DSP:TMS320F28335作为控制核心,以便提高系统的可扩展性。图6为软件流程图,程序实现过程如下:
根据电流传感器的信号电流与原边导轨电流的对应关系,预先设定电流基准,每个PWM周期结束时,进行A/D采样,进入中断服务程序;在中断服务程序中,将A/D采样值与电流基准值比较,根据不同情况,确定调整方式,依据设定的算法进行调节。
1.5 PWM控制芯片实现稳压输出
本稳压方案中开关转换器的控制方式采用最基本的电压型控制,属于单闭环负反馈控制方式。BUCK转换器的输出电压采样以后,与给定的基准电压相比较,产生变化的 PWM,驱动功率开关管,实现输出电压的稳定调节。
1.6 耦合线圈的仿真设计及优化研究
补偿电容仅仅是为了提高功率传输能力,但是并不能改善线圈的耦合性能。而优化耦合线圈的结构,可以提高能量的传输效率,并一定程度上减小电力电子器件的应力。因此优化耦合线圈结构的研究具有重要的意义。耦合线圈之间的磁场效应也是整个无接触式供电的核心和理论基础,研究耦合线圈的磁场状况是项目的关键部分。通过Ansys仿真软件,进行仿真模拟,设计线圈结构,使得线圈耦合程度增强。
············
2 项目研究的实施方案及研究方法
2.1 项目研究的实施方案
AGV无接触式供电装置的技术指标和参数:输入电压:三相AC380V,频率(50±2)Hz;额定输出功率:3.3kW;输出稳压值:直流400V。
电网输出三相交流电经过三相PFC电路,提高功率因数和电能质量,给后级电路提供稳定的直流输入。经过全桥逆变结构,直流电转变为高频交流电,流过耦合线圈原边导轨,在临近空间产生高频交变磁通,位于AGV底盘的副边线圈在靠近原边导轨空间通过感应耦合高频交变磁通获取感应电动势,补偿整流稳压后给AGV供电。发射部分控制:对原边导轨电流隔离采样,反馈到DSP控制中心,产生驱动信号控制逆变桥,实现原边导轨的恒流。接收部分的控制:对负载电压采样反馈到PWM控制芯片实现输出电压恒定。
2.2 项目的研究方法
(1)拾电器电磁机构设计的研究方法:以电磁场理论、磁性材料知识、变压器原理以及磁路设计原理为理论基础,针对AGV的应用提出研究指标,Ansoft Maxwell有限元电磁场仿真软件为工具,最后设计开发电磁机构实物进行实验测试与验证。
(2)拾电器电能处理电路设计的研究方法:以谐振电路、整流滤波电路和稳压电路相关理论为基础,在Simulink中对电路进行仿真,设计并验证电路拓扑的合理性。配合电路设计软件Altium Designer进行电路设计,完成实物电路制作并加以测试与验证。
3 结语
本研究项目旨在通过感应耦合式电能传输技术实现AGV的无接触供电,相比于传统导线连接进行供电的方式,其最大优点是安全,可以避免接触火花和导线裸露造成的安全隐患,即使在恶劣的气候下,如雨雪天,给AGV供电也无触电的危险;其次是便利,采用无接触式供电方式节省充电桩占用的大量土地,使AGV供电不再是制约其发展的困局。本项目通过感应耦合式电能传输技术对AGV供电,促进无接触供电技术的发展与进步。
[1]法勒移动供电贸易(上海)有限公司.非接触供电系统在物流领域的应用[J].物流技术与应用,2007,12(4):100-101.
[2]孙勇,楼佩煌,吴亮亮.非接触供电系统的应用平台研究[J].工业控制计算机,2009(3).
[3]张捍东,董保华.自动化仓库中AGVS的设计.起重运输机械,2006,11:12-16.
[4]杨文华,苏运春,喻锐等.无接触供电技术在AGV中的应用.物流技术与应用,2009,3:86-88.
[5]武瑛,严陆光,徐善纲.新型无接触电能传输系统的性能分析.电工电能新技术,2003,22(4):10-14.
[6]纪寿文,李克强.智能化的物流搬运机器人——AGV.中国物流与采购,2004,2:56-57.
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
电力系统自动化(2021年18期)2021-09-25
湖南电力(2021年2期)2021-05-08
中国特种设备安全(2019年7期)2019-09-10
现代电子技术(2018年11期)2018-06-12
新能源科技(2018年10期)2018-02-15
船电技术(2017年4期)2017-05-24
中学物理·高中(2016年12期)2017-04-22
电测与仪表(2016年11期)2016-04-11
制造技术与机床(2015年10期)2015-04-09
