
Zigbee路由协议在VANET监控系统中的应用分析
2016-09-26 11:28于春玲
智能计算机与应用 2016年4期
关键词:车联网
于春玲

摘要:本文以VANET的应用需求为出发点,提出一种基于双层拓扑结构的网络模型,并使用Network Simulator 2.0版软件完成了模型仿真,分析了簇树、AODVjr以及ZBR三种路由协议在相同车联网环境下的性能表现。最终表明,ZBR路由协议能够在确保较短时延以及较高分组递交率的条件下,很好的实现网络开销的降低。
关键词:车联网;NS2;路由协议;AODVj
中图法分类号:TP393 文献标识码:A
Abstract:Based on the application of VANET demand as the starting point, this paper puts forward a Network model based on two-layer topology, and use the Network Simulator version 2.0 software to complete the model simulation. After that, the paper analyses the cluster tree and the AODVjr and ZBR three types of routing protocols in the same car performance under the networked environment. Eventually show that ZBR routing protocols to ensure shorter time delay and high packet submit rate under the condition of good implementation, based on which,network overhead is reduced.
Key words:Vehicular Ad Hoc Networks;NS2;routing protocol;AODVj
0 引言
车队整体行进的过程中,需要关注的主要问题有车载自组网内自身车况、车队周边情况的互通和感知,车载自组网与传统移动Ad hoc网络(MANET)存在较大不同,这是由于车辆在行驶过程中容易受到道路、环境等多方面的作用和影响[1]。因此车辆数据的感知,均是依靠车身的传感网络。本文致力于分析高速移动环境下,3种ZigBee网络路由协议在NS-2仿真器中的性能表现。
1 双层网络模型
基于设备功能的区别, ZigBee网络中的设备可以根据802.15.4标准分为2类:简化功能设备(Reduced Function Device,RFD)和全功能设备(Full Function Device,FFD)两类。其中,RFD是按照具体应用的需要能够完成IEEE802.15.4全集协议的部分功能,而FFD则具备了IEEE802.15.4全集协议的全部功能。由此,ZigBee网络中的设备将细分为协调器、路由器以及终端设备,其中协调器和路由器属于FFD,而终端设备则可以是简化和全功能设备。需要注意的是,在ZigBee网络中,必须有一个FFD来作为协调器[2]。
ZigBee网络支持网状、星型以及簇树状3种拓扑结构。网状拓扑结构就本质而言便是点对点对等拓扑结构,在这种网络构成中设备多数为FFD类型,借助多跳通信方式能够实现范围较广的覆盖,且拥有自组织和修复的能力。不过网络难以做到无限的放大,这是因为伴随网络的发展,丢包和延迟问题将会凸显。相对而言簇树状拓扑结构类属于网状拓扑结构,网络中的RFD则是作为簇树状中的叶子节点。在星型网络拓扑结构建设环节中,首先启动的全功能设备承担了协调器角色,这种拓扑结构适合节点数较少、距离较近的网络。
研究中,以车队监控系统监测自身车况、感知周边环境态势、保障网络通信实际需求为出发点,本文提出了一种车域网和车载网双网融合的链式拓扑网络模型。
车域传感网[3]于业界中也称车域网,是利用众多分布在车辆中的传感装置所组成构建的无线网络,具体参见图1所示。这些传感器设备能够通过系统合作实现对不同环境和位置情况的感知,例如环境中的温湿度、车辆自身的速度情况等。该网络能够完成对单台车辆各项参数的感知、传递和融合任务。
同时,车辆自组织网络(Vehicular Ad Hoc Networks),在业界中简称之为VANET,原理设计便是将携有无线通信模块的车辆当作网络中的节点,基本构建则如图1所示。行进中的车辆借助分布和多跳方式实现通信,无需其它设施便能获取道路行驶车队间的实时通信。
2 几种ZigBee路由协议
2.1 Cluster-Tree路由算法[4]
当节点接收分组之后,便将分组向下一节点进行传输,此过程没有路由发现,节点也无需对路由表提供维护。这种算法的优势在于降低了路由节点能耗以及协议的开销,同时也能降低网络对节点存储能力的依赖程度。劣势在于通过簇树建立的路由通常并非最佳路径,因而容易引起分组时延增加,以及加大深度较小节点的任务量,而相对应深度大节点的业务量却很小,也就是形成了通信的不均衡,由此将供电能力有限的节点失去功能,对网络稳定性造成影响。
2.2 AODVjr算法[5]
这种算法与传统AODV算法存在一定区别,即简化版。AODVjr算法中规定只允许分组的目的节点能够进行RREP回复,即便中间结点存在与目的节点的路由也不能完成对RREP的回复。AODVjr中不包含AODV算法中的先驱节点列表,即在相当程度上简化了路由表结构。AODVjr节点假设探测到下条链路中断情况,则为此可借助一定任务节点完成对RREP分组信息的转发,同时对网络中受影响的源节点派发通知。AODVjr算法中,RERR只对传送分组失败的源节点提供转发,这就无需先驱节点列表作为支持。在数据传输的环节中,如果网络中出现链路中断,AODVjr算法将自动展开本地修复,此过程仅允许目的节点实施RERR回复。如果AODVjr本地修复失败,则将RERR传输到数据分组的源节点,借此告知其链路中断无法实现到目的节点的通信。相应格式也就设置简化为包含不可到达的地址信息,而非多个不可到达的地址信息。AODV节点按照一定周期实现HELLO分组的发送,提供节点连通数据;AODVjr算法中并不涉及该过程,而仅是按照分组或者MAC层所发送的信息老婆买个自己哦更新节点列表的及时更新。
2.5 ZigBee路由[6]
在该路由中能够将节点分为RN+和RN-2种。前者是指拥有足够存储空间、计算能力运行AODVjr算法的节点;RN-则是指不具备充足存储和计算能力而实现AODVjr算法运行的节点。当RN-获得分组后仅仅能运行簇树算法。
3仿真实现
3.1 NS2平台介绍
NS2(Network Simulator Version 2)是面向对象、离散时间驱动的一种网络环境模拟器。NS2模拟器是免费的,并且向公众提供开源代码,因而使得网络开发更为便捷。发展至今,其涵盖的模块已经涉及到网络技术的众多方面,因此NS2已然成为时下使用最为广泛的一种网络模拟工具[7]。
NS2主要由3个部分组成,分别为:时间调度器、网络设置模型库以及网络元素对象库。具体地,调度器主要提供对当前时间的记录以及实现网络时间链表中事件的调度服务,是仿真平台中的重要设计组成。网络元素对象包括着:代理(Agent)、链路(Link)、节点(Node)、数据源(Data Source)等类型要素;其中节点、代理、链路继承了时间处理器以及NS Object,发挥对多项事务的处理功能[8]。
NS2使用分裂对象模型,也就是将对象分为Otcl类对象以及C++类对象2个部分完成描述。针对分裂对象模型,NS配置了编译和解释两级体系结构。编译层部分是由C++类构成,C++语言虽然执行速度较快,不过修改和编译速度却显缓慢,因此仅仅适用于编译层协议细节的描述;前端则是Otcl(Oject Tool Com-mand Language)解释器,能够修改迅速并支持交互操作模式,适用于模拟环境的建立和设置。NS2内核定义了层次编译类结构;同时在解释器中也含有类似的解释类结构,因此用户在创立新的仿真对象之后,解释器便对其进行初始化并完成相应的对象建立映射。
3.2 仿真场景设置
设置过程旨在实现对高速行进的车队在特定环境中ZigBee网络中三种路由协议的性能进行详细分析,实验使用表1中的仿真参数。
MAC层应用IEEE802.15.4协议,并对不同路由协议推出结果对比。模拟场景选取600*200矩形,配置11个节点,所有节点均绑定7个终端节点,选定的场景持续100s时间。流量场景选取数据流cbr,车辆间主节点间能够实现交互通信,车内子节点仅能与自身车辆主节点实现通信,却无法与其他车主节点通信。同时选取shadowing模型作为无线传播模型, Man-hattan模型为移动节点模型。另外,应用层使用大小为85bytes的CBR数据包,发包速率设定为1P/s。使用ZBR路由时,网络中配置了5个RN+节点。
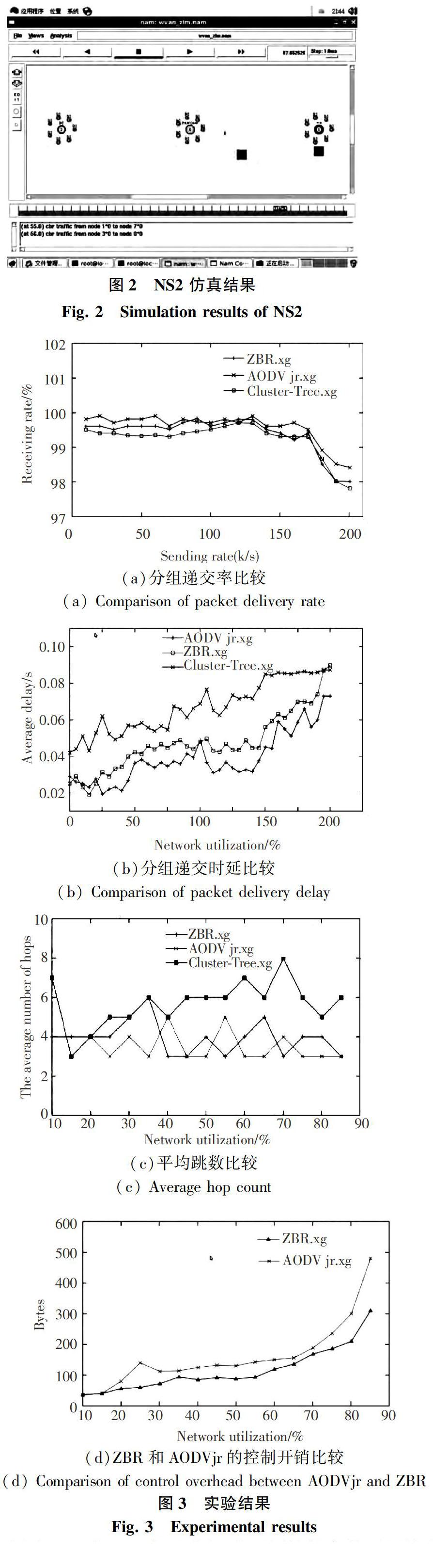
使用NS2仿真器进行模拟。执行命令:ns wpan_zlm.tcl,完成模拟之后,打开“.nam”的动画模拟图像,便可以清晰看到车载网中的整个通信过程,具体模拟结果如图2所示。
4 仿真结果分析
(a) 分组递交率比较
(a) Comparison of packet delivery rate
(b)分组递交时延比较
(b) Comparison of packet delivery delay
(c)平均跳数比较
(c)Average hop count
(d)ZBR和AODVjr的控制开销比较
(d) Comparison of control overhead between AODVjr and ZBR
丢包率、数据吞吐量以及平均时延是表征一个网络性能优良与否的主要参数。而端到端的丢包率、平均时延以及数据吞吐量则需在不同数据发送速率条件下设计执行观测[1]。本文研究实验中借助对数据源发起数量以及通信速率的调节,实现对网络信道在差异化占空比条件下的控制开销、平均时延、分组递交率以及平均跳数的对比分析,对3种不同协议完成了应用分析,结果参见如图3所示。
由图3(a)中可以直观看出,在不同协议条件下网络所实现的递交率相差很小,即便在200k/s的发送速率条件下,网络实现的分组递交率均维持在98%的水平,能够获得优良性能。
由图3(b)、(c)中进一步看出采用簇树协议展现了较高的平均跳数和递交时延。ZBR路由实现的平均跳数为3.5,AODVj路由实现的平均跳数为4。就递交时延分析而言,ZBR性能略高于AODVjr。
由图3(d)观察控制开销情况,可以明显观察到ZBR具有明显的优势。Cluster-Tree无需配置路由,所需控制开销为零,而AODVjr协议却要保证节点配备足够的计算和存储能力,虽然该种协议均能搜寻到距离最优的路径,但是需要维持路由表作为代价,因此控制开销较大。综合而言,ZBR协议则综合了上述2种协议的优点,能够在较短时延和较高分组递交率的条件下,有效降低了网络控制开销。
5 结束语
Cluster-Tree协议算法原理简单、计算量小,适合移动性弱且规模较小的网络,而ZBR协议因为RN+节点具备优选原则,在最终性能方面要优于其它2种协议,适合在稳定性强、规模大的网络中使用。不过这种协议要求节点具备一定的存储空间和计算能力,因此一定程度上会增加硬件成本。后续研究即表现在RN+节点优选原则算法仍有待发展,这必将显著改进、并有效提升ZBR路由协议的性能。
参考文献
[1] 肖玲,李仁发,罗娟.车载自组网的仿真研究综述[J]. 系统仿真学报,2009,21(17):5330-5335,5356.
[2] Jiang Ting,Cheng-lin.Zigbee Technology and Application[M].BeiJing University of Posts and Telecommunications Press,2006:46-115
[3] 李瑞锋.基于车域网技术的车载无线终端的研制[D].南京:东南大学,2007
[4] 白乐强,王玉涛.基于非均匀分簇机制的ZigBee混合路由算法.计算机应用,2016,36(1):81-86
[5] 洪锡军,车克南,张激.无线自组网路由协议研究.计算机工程,2005,31(8):105-107
[6] 刘瑞霖,向勇.车载自组网链路接入协议对比分析[J].计算机应用,2011,31(S2):5-8
[7] 马崇霄,吴长奇;.基于网络仿真器NS2的Ad hoc网络路由协议仿真.电子测量技术,2008,31(5):75-79
[8] 刘洋,詹宜巨,蔡庆玲.空分复用无线自组网跨层设计的NS2仿真研究[J].系统仿真学报,2012,24(7):1412-1417
猜你喜欢
中国广播(2016年11期)2016-12-26
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年10期)2016-06-16
商(2016年8期)2016-04-08
商(2016年4期)2016-03-24
无线互联科技(2015年6期)2016-03-05
无线互联科技(2015年5期)2016-03-04
物联网技术(2015年7期)2015-07-21
电子技术与软件工程(2015年6期)2015-04-20
