
基于DIDSON的鱼群检测及鬼影抑制方法
2016-09-26 07:20刘军清雷帮军李伟生
计算机应用与软件 2016年3期
简 夏 刘军清 陈 鹏 雷帮军 李伟生
(三峡大学计算机与信息学院 湖北 宜昌 443002)
基于DIDSON的鱼群检测及鬼影抑制方法
简夏刘军清陈鹏雷帮军李伟生
(三峡大学计算机与信息学院湖北 宜昌 443002)
双频识别声纳(DIDSON)能在浑浊黑暗的水下获得清晰的视频数据。对双频识别声纳拍摄的鱼群视频进行目标检测是后续跟踪、识别的前提。首先分析双频识别声纳图像噪声特性和鱼体亮度统计特性;基于此,提出并实现一种声纳鱼群检测方法,并就检测中的鬼影问题提出了抑制方法;最后利用形态学滤波去除孤立噪点。实验结果表明,该方法在鱼体目标轮廓清晰度、鱼体大小准确度方面明显优于经典方法,且满足实时跟踪、识别的应用要求。
双频识别声纳鱼群检测背景差分法鬼影抑制
0 引 言
双频识别声纳是近几年出现由美国华盛顿大学研发,能在可视度为零的水下获取清晰的数据影像[1]。与其他声纳设备相比,优势突出,是目前唯一一款使用声学透镜来压缩波束的声纳。
鱼群统计对于水下养殖以及珍贵鱼类保护具有重要的应用价值[2,3]。Pavlov[4]等利用DIDSON观测勘察加半岛虹鳟鱼回游产卵的情况,大致测定出了该地虹鳟鱼回游距离和数量。在文献[5]中,基于前向声纳视频,提出一种水下目标检测与跟踪方法,该方法首先利用Gabor滤波器进行图像预处理,然后采用Kalman滤波器进行检测与跟踪。Han等利用DIDSON视频,提出了一种鱼群迁移规模统计方法,该方法首先利用相位相关法进行背景消除,然后利用轮廓滤波进行检测跟踪,并采用卡尔曼滤波来避免重复统计[6]。Petreman和Michal分别就DIDSON进行鱼群统计可能存在的误差进行了分析评估,并提出了相应的解决办法[7,8]。Juza和Kresimir所在课题组就鱼群对于拦网的反应行为进行了分析,其数据来源即为DIDSON[9,10]。Alistair则就南非河口关闭期间海冰区鱼群的行为进行了声纳监控[11]。国内董剑锋等学者对双频识别声纳图像处理进行了初步研究,并运用到幼香鱼计数上[12,13]。
上述方法主要是针对鱼群进行大致的统计分析,缺乏较为准确的定量分析。而已有研究表明,利用DIDSON视频进行鱼群各种应用,其关键是鱼群检测方法的精度[6-9]。本文在分析DIDSON数据图像噪声特性和鱼体亮度统计特性的基础上,对已预处理的数据影像进行目标检测,并对检测目标中的鬼影提出一种抑制方法。最后通过形态学开闭运算去除孤立噪声点,获得较为理想的鱼群目标检测结果。为后续跟踪、识别奠定良好的基础。
1 DIDSON图像特性分析
1.1DIDSON图像的噪声特性
已有研究表明,水下环境噪声是服从高斯分布的随机信号[15],但理论证明较为复杂。本文采用一种简单的数学统计方法对DIDSON图像噪声特性进行分析。选取同一频率、同一位置拍摄的DIDSON数据影像,对其n帧数据进行统计平均,将得到的图像作为无噪声图像,并通过原数据图像与无噪声图像之差作为噪声图像,并对噪声图像进行统计拟合。
(1)
本文对1000帧分辨率为510×307的图像序列进行统计分析,其中n取40,无噪图像与噪声如图1所示,(a)、(b)为第1帧、第20帧原始图像,(c)为40帧平均后得到的图像,(d)、(e)为对应的噪声图像。获得1000帧噪声图像Ri,然后进行噪声分布特性拟合,即统计1000帧噪声图像的灰度直方图分布规律,并对该数据进行核密度估计和正态分布概率密度估计,实验结果如图2所示。

图1 原始图像、无噪图像及噪声图像

图2 随机噪声的频率归一化直方图及拟合曲线
图2中,正态分布概率密度估计能很好地拟合噪声图像的灰度频率分布,因此可知在DIDSON数据影像中含有大量随机噪声,且噪声服从高斯分布。需要说明的是,这里分析过程中没有考虑鱼群游动时因水波纹导致的干扰信号。该干扰信号主要是以阴影或者鬼影图像的方式呈现,在目标检测后需要进行抑制。
1.2DIDSON鱼体亮度分布统计分析
声纳图像从亮度分布而言主要包括三个区域:高亮区域、阴影区域和背景区域。其中高亮区域主要是由声波在目标表面反射造成,即为鱼体目标;阴影区是由于鱼体遮挡导致声纳难以达到的区域;背景区域是指没有鱼体的拍摄区。因此DIDSON鱼群数据影像中鱼体亮度主要分布在高亮区域。声纳图像中像素点的亮度代表了相应空间的回波强度,相对于光学图像而言,声纳图像是无色的,习惯用黑色代表弱回波,白色代表强回波,中间由灰度表示,其灰度级为0~255。综上所述,采用灰度图像的统计方法可以统计声纳图像中鱼体亮度的统计分布特性。本文选取了120帧鱼群图像序列进行统计分析,首先人工标注鱼体目标的坐标,对相应位置的灰度值进行统计分析,图3为鱼体目标的灰度直方图分布图。
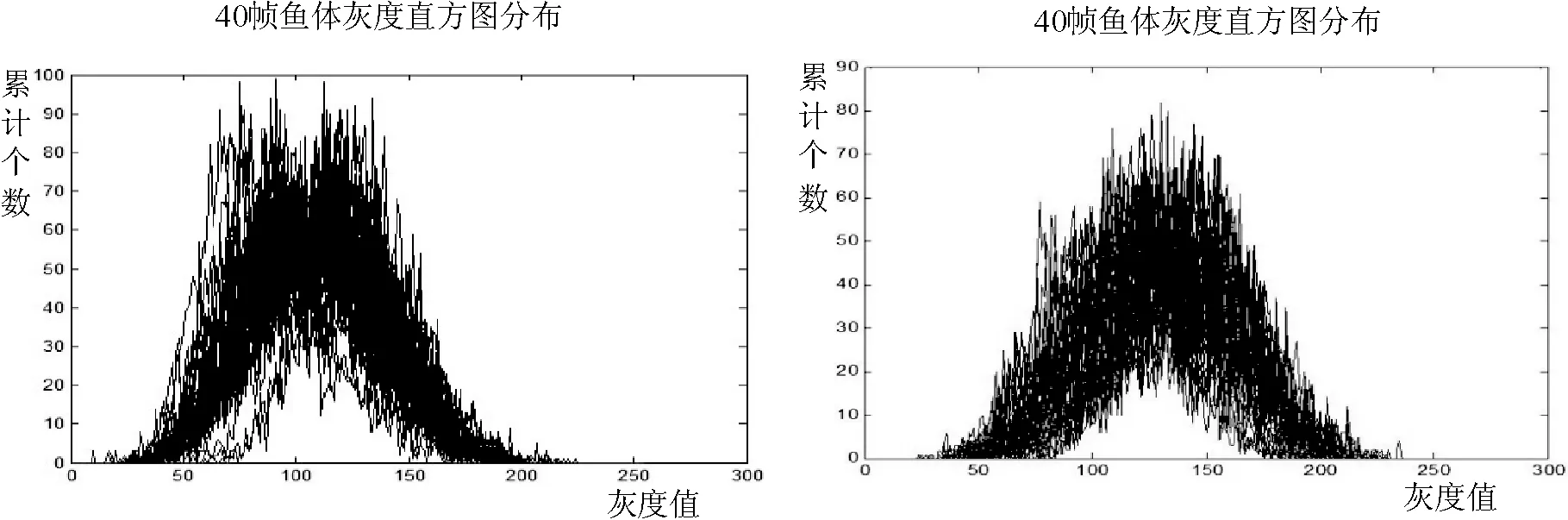
图3 每40个鱼体的灰度直方图分布
图3中的二个图均为每40帧的鱼体目标直方图统计结果。由图可知,鱼体目标的90%以上的灰度值分布范围为[60, 180]。该数值为后续进行鱼群检测及鬼影抑制提供了阈值设置依据。
2 鱼群目标检测算法
由于声纳图像本身的信息小于随机噪声信息,因此采用光学图像的目标检测算法检测鱼群效果较差。检测结果含有大量孤立噪声点,鱼体轮廓含有大量毛刺,若第一帧图像含有鱼体,其背景差分法检测结果中含有鬼影。
本文充分利用声纳图像噪声特性和鱼体亮度统计特性,在背景差分法基础上提出了一种DIDSON鱼群目标检测及鬼影抑制方法。思路:分析声纳图像特性,其噪声为随机高斯噪声,鱼体目标属于高亮区域且灰度值范围为[60, 180];其次采用背景差分法寻找可能出现的鱼体目标点;利用声纳高亮区域特性,对初步检测的鱼体目标点进行鬼影判断去除鬼影;最后采用形态学开闭运算去除孤立噪声点。其整体目标检测流程如图4所示。

图4 本文算法流程图
2.1背景差分法及鬼影问题
背景差分法:设背景模型为M(x)={v1,v2,…,vN},其中N个样本值均为已被判断为背景的像素值。记v(x)为x点处的像素值,设定阈值R,计算{v(x)-R,v(x)+R}区间内与样本模型M(x)相交的样本值个数,若数值大于预设的某个最小值,则将当前像素点x的像素值v(x)判断为背景,否则为前景。
由于采用一帧建模,如果模型初始化时出现目标,会将前景目标点误判为背景。当前景目标点离开后,当前像素值无法与背景样本集匹配,导致背景像素点被错误地检测为前景点,形成鬼影。另外,背景差分法模型更新缓慢,导致其目标检测结果错误传播,严重影响后续的跟踪或识别。
2.2本文鬼影抑制方法
通过对DIDSON数据图像的特性分析可知声纳图像中的鱼体目标属于高亮区域。本文基于此特性提出了鬼影抑制方法。其基本思想:采用背景差分法初步寻找出当前帧中的“前景像素点”;对这些“前景像素点”进一步判断,若此像素点的像素值大于阈值T,即判断为前景,否则认为是鬼影并判断为背景并更新背景模型。
通过声纳图像特性分析得知,DIDSON图像序列的鱼体高亮区域灰度值主要分布在[60, 180]之间,进行鬼影抑制时选择合适的阈值非常重要。当阈值取值太小时,包含的随机噪声点较多,检测效果不佳,导致鬼影抑制不完全;阈值取值过大时,高亮区域边缘像素值部分被去除,导致目标范围缩小。因此选择合适的阈值是关键,通过大量实验验证,阈值T取[70, 80]时目标检测结果较好。如图5所示,不同阈值对同一帧图像的背景去除结果不同。当T=60时,图像中存在大量噪声;当T=90时,高亮区域范围缩小。当T=73时,图像在保留目标范围的基础上极大地减少噪声干扰。

图5 同一帧不同阈值的背景去除结
2.3形态学滤波
鬼影判断后的图像中存在鱼体边缘有毛刺、鱼体有较小的非连通区域、图像中含有较多的孤立噪点等问题。通过形态学开运算的腐蚀阶段可以消除孤立噪声点,膨胀阶段可以恢复非连通区域。形态学闭运算可平滑鱼体边缘,通过上述处理后,检测结果更好。
3 实验结果分析
实验方法:首选选取几种经典的光学图像目标检测算法对DIDSON图像进行目标检测,然后将本文方法与其他经典方法针对小鱼群和大鱼群检测性能进行对比分析。实验环境配置为matlab2009a,内存8GB,处理器为IntelCorei5-3470 3.20GHz、声纳视频帧率为8fps。
3.1常用目标检测
本文选取帧间差模型、平均背景法模型、高斯混合模型、CodeBook背景模型、背景差分法对大鱼群和小鱼群进行目标检测。其大鱼的检测结果如图6所示。

图6 五种方法针对大鱼群的检测结果(白色圈标记的鱼体为鬼影)
图6中,对于声纳视频五种算法的检测结果,其中帧间差模型效果差, 平均背景法和高斯混合模型检测结果中含有大量噪声,CodeBook背景模型和背景差分法检测效果较好。但由于背景差分法是一帧建模,当建模时存在鱼体目标的情况下会出现鬼影且消除缓慢,导致整个图像序列检测结果全部错误,给后续的鱼群计数和跟踪带来极大影响。
3.2本文算法与其他算法对比分析
将本文检测算法与CodeBook背景模型、背景差分法进行性能比较,实验数据同样选取小鱼群视频和大鱼群视频。大鱼群检测结果如图7所示。
图7中,CodeBook算法检测出的目标边缘模糊,且存在大量的误检像素。背景差分法存在严重的鬼影现象(图7中第3行椭圆标记的鱼体为鬼影),鬼影在第78帧以后也未消失。而本文提出的算法在第28帧之前,鬼影已消失,整体检测性能明显优于CodeBook算法和背景差分算法。同时本文算法在鱼体较小的情况下,其检测效果同样较好,如图8所示。

图7 本文方法与其他算法针对大鱼群的检测结果比较
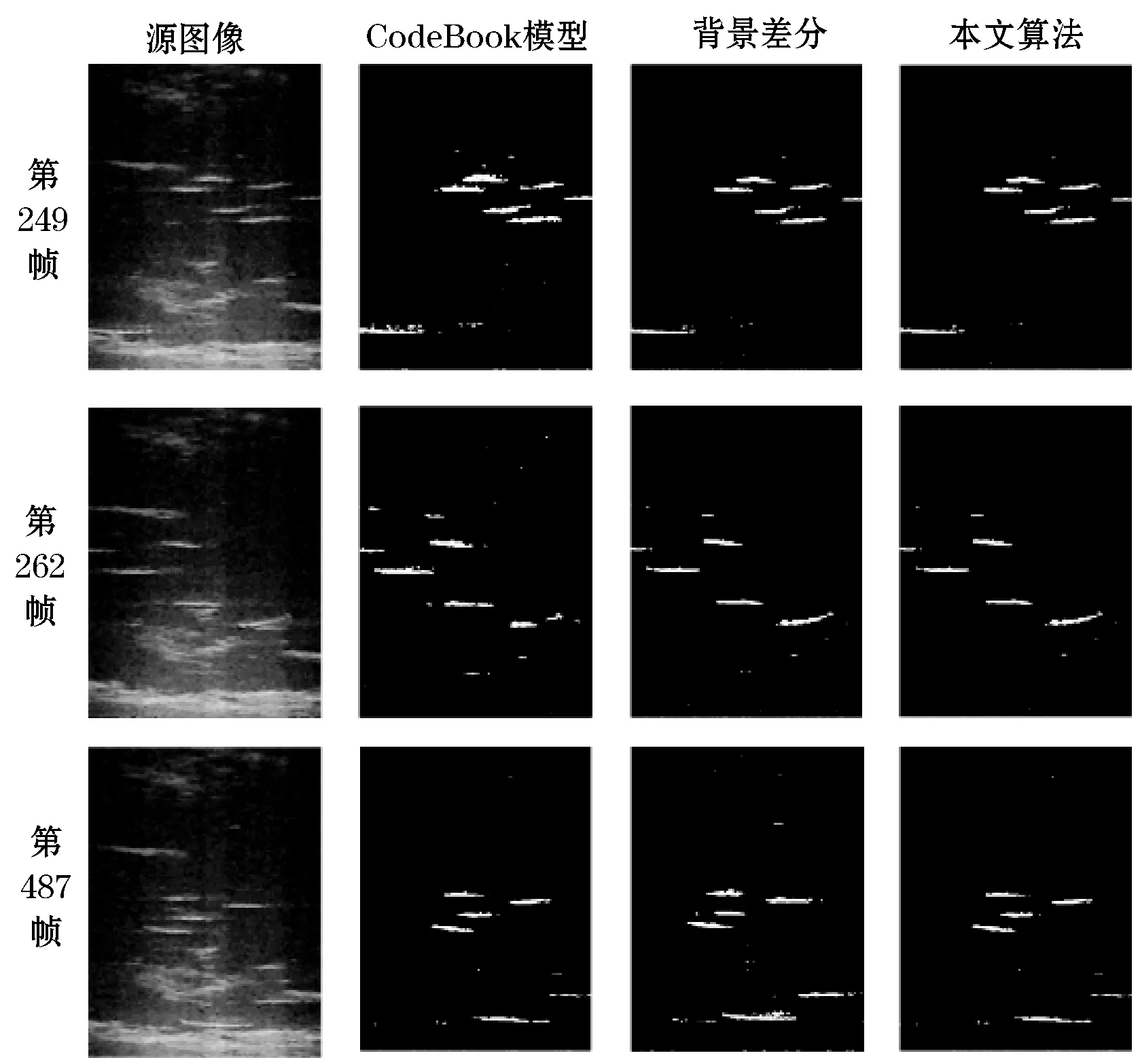
图8 本文算法与其他算法针对小鱼群的检测结
4 结 语
由于声纳图像含有大量噪声信息,采用光学图像的目标检测算法不能满足声纳图像目标检测的要求。针对这个问题,本文提出的方法在保留背景差分法优势的同时能快速抑制鬼影。本文方法与常用目标检测算法相比,其目标检测效果更好,能快速检测出鱼体目标,鱼体轮廓清晰,为后续跟踪、识别处理提供准确的输入数据。且本文提出的算法能满足实时性要求,可应用于水下鱼群监测应用。
[1]ShenW,YangL,ZhangJ,etal.ThesurveyoffisheryresourcesandspatialdistributionusingDIDSONimagingsonardata[C]//IFIP2013:InternationalconferenceontheAdvancesinInformationandCommunicationTechnology,NewYork,US:SpringerPress,2013:366-375.
[2] 张进.基于双频识别声纳DIDSON的鱼群定量评估技术[D].上海:上海海洋大学,2012.
[3] 谭细畅,史建全,张宏.EY60回声探测仪在青海湖鱼类资源量评估中的应用[J].湖泊科学,2009,21(6):865-872.
[4]PavlovDS,BorisenkoES,PashinVM.Investigationsofspawningmigrationandassessmentofabundanceofthekamchatkasteelhead(parasalmomykiss)fromtheUtkholokRiverbymeansofdualfrequencyidentificationsonar[J].JournalofIchthyology,2009,49(11):1042-1064.
[5]XieSR,ChenJB,LuoJ,etal.Detectionandtrackingofunderwaterobjectbasedonforward-scansonar[M].Berlin:SpringerPress,2012.
[6]HanJ,NaotoH,AkiraA,etal.AutomatedacousticmethodforcountingandsizingfarmedfishduringtransferusingDIDSON[J].FisheriesScience,2009,75(6):1359-1367.
[7]PertremanaIC,NicholasEJ,ScottWM.Observerbiasandsub-samplingefficienciesforestimatingthenumberofmigratingfishinriversusingdual-frequencyidentificationsonar(DIDSON)[J].FisheriesResearch,2014(155):160-167.
[8]MichalT,JaroslavaF,HelgeB,etal.EvaluationofpotentialbiasinobservingfishwithaDIDSONacousticcamera[J].FisheriesResearch,2014,155(4):114-121.
[9]JuzaT,RakowitzG,DrastikV,etal.Avoidancereactionsoffishinthetrawlmouthopeninginashallowandturbidlakeatnight[J].FisheriesResearch,2013,147(10):154-160.
[10]KresimirW,ChrisDW,JohnKH.Walleyepollock(Theragrachalcogramma)behaviorinmid-watertrawls[J].FisheriesResearch,2013,143(1):109-118.
[11]AlistairB,PaulDC,AlanKW,etal.DielfishmovementsinthelittoralzoneofatemporarilyclosedSouthAfricanestuary[J].JournalofExperimentalMarineBiologyandEcology,2011,406(1):63-70.
[12] 童剑锋,韩军,沈蔚.声学摄像仪图像处理的初步研究及在渔业上的应用[J].湖南农业科学,2010(9):149-156.
[13] 童剑锋,韩军,浅田昭.基于声学摄像仪的溯河洄游幼香鱼计数[J].渔业现代化,2009,36(2):29-33.
[14]AykinMD,NegahdaripourS.Forward-look2-Dsonarimageformationand3-Dreconstruction[C]//IEEEOceansConference,SanDiego,IEEEPress,2013:23-27.
[15] 陈亮,陈晓竹,范振涛.基于Vibe的鬼影抑制算法[J].中国计量学院学报,2013,24(4):425-429.
FISHSWARMDETECTIONANDGHOSTSUPPRESSIONMETHODBASEDONDIDSON
JianXiaLiuJunqingChenPengLeiBangjunLiWeisheng
(School of Computer and Information Technology,China Three Gorges University,Yichang 443002,Hubei,China)
Dual-frequencyidentificationsonar(DIDSON)cangetclearvideodatafromcloudyanddarkunderwater.TocarryoutobjectdetectiononfishswarmvideocapturedbyDIDSONisthepreconditionofsubsequenttrackingandrecognition.First,weanalysedthenoisefeatureofDIDSONimageandthestatisticalpropertyoffishbodies’brightness.Basedonthatwepresentedandrealisedasonarfishswarmdetectionmethod,aswellasthesuppressionmethodinregardtoghostproblemindetection.Finally,weemployedthemorphologicalfilteringtoremovethesolitarynoisepoints.Experimentalresultsshowedthattheproposedmethodwasobviouslysuperiortoclassicmethodsintheaspectsofsharpnessoffishobjectcontourandtheaccuracyoffishsize.Italsosatisfiedtheapplicationrequirementofreal-timetrackingandrecognition.
DIDSONFishswarmdetectionBackgroundsubstractionGhostsuppression
2014-09-02。国家自然科学基金项目(61272236);湖北省教育厅重点项目(D20131306);三峡大学楚天学者基金项目(KJ20 12B001)。简夏,硕士生,主研领域:智能视觉。刘军清,副教授。陈鹏,教授。雷帮军,教授。李伟生,教授。
TP391.41
ADOI:10.3969/j.issn.1000-386x.2016.03.040
猜你喜欢
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
中外文摘(2017年19期)2017-10-10
印刷技术·数字印艺(2016年11期)2016-12-06
科技视界(2016年6期)2016-07-12
电测与仪表(2016年3期)2016-04-12
电测与仪表(2016年20期)2016-04-11
火控雷达技术(2016年2期)2016-02-06
浙江大学学报(工学版)(2015年1期)2015-03-01
