
基于3.0GHz频率的S波段船用导航雷达系统研究及实现
2016-09-21 06:09马天明
山东农业大学学报(自然科学版) 2016年4期
马天明
武汉理工大学航运学院,湖北武汉430063
基于3.0GHz频率的S波段船用导航雷达系统研究及实现
马天明
武汉理工大学航运学院,湖北武汉430063
针对目前国内民用船用雷达导航系统价格高这一问题,设计了一套基于3.0GHz频率的S波段船用导航雷达系统。在分析了测距原理和距离模糊问题的基础上,确定采用多重脉冲重复频率测距算法进行目标的测距,同时给出了雷达方程的计算公式。然后对雷达系统的发送机和接收机的设计指标进行了分析,提出了系统的具体设计指标。最后给出雷达系统中的频率源、低噪声放大器及混频器的实现方法并对其进行了仿真,仿真结果表明设计的基于3.0 GHz频率的S波段船用导航雷达系统的指标很好的满足了设计要求。
3.0GHz;船用雷达;指标
随着我国经济的快速发展,航运船只数量也大幅度增加。雷达导航系统在观测海上船只、海岸、浮标和导航方面起着重大作用,对保障船舶航运的安全具有重要意义。但目前国内船只的导航系统基本都采用可靠性高、价格低的日本产品,民用船用导航雷达系统无法自主研发,将直接对我国船舶工业的基础稳固产生影响。在雨雾环境中,S波段海面反射小、衰减低[1-3],特别适用于恶劣天气下的目标探测。因此,必须进行S波段民用船用导航雷达系统的研制,这对我国航运事业的发展具有举足轻重的意义。
1 测距原理与雷达方程计算
1.1测距原理
如果可以精确地的测出电磁波发射时刻至点从波从目标反射回来时刻的时间间隔[4],那么就能够得出目标和雷达间的准确距离。设电磁波从发射至返回所经历的时间长度为t,传播速度为光速C,待测目标与雷达距离为R,则距离R如式1所示:

由于待测目标回波的延迟时间通常会比脉冲重复周期长,从而导致收、发脉冲的对应关系产生混乱,进而使同一待测目标的距离读数产生多种可能,所以需要在信号接收时通过运算消除模糊。本文所设计的民用船用雷达导航系统要求测距不模糊距离R大小为10 km,而且在海杂波附近对目标的检测能力强、精度高。为此使用多重脉冲重复频率测距法,在不模糊距离R大小为10 km、脉冲宽度τ大小为250 ns、占空比为10%的条件下,目标与雷达的距离如式2所示:
式中,f1和f2表示雷达系统的发射频率,t1表示雷达系统电磁波的发射时刻,t2表示雷达系统电磁波的接收时刻,C表示电磁波传播速度。
1.2雷达方程
雷达方程是依据雷达参数、目标特性、传播路径和所要求的测量性能来计算雷达在各种工作模式下的最大测量距离的方程式。目前使用较多的是一次雷达方程,在考虑了目标的截面积、最小可检测信号和系统损耗的基础上,给出了系统采用的雷达方程。
1.2.1雷达方程根据相关文献可知[5,6],雷达的最大测量距离Rmax与雷达参数和目标特性间的关系如公式3所示:

式中,Pt表示雷达的发射功率,G表示雷达的天线增益,σ表示待测目标的散射截面积,λ表示雷达电磁波的波长,Simin表示雷达系统的最小可检测信号,A表示雷达接收天线的有效接收面积。在左式中,雷达最大测量距离Rmax与λ1/2为反比关系,而右式中,Rmax却与λ1/2为正比关系。这是因为在天线面积不变、波长λ增加时雷达天线的增益下降,使雷达的作用距离减小;而当天线增益保持不变的情况下,波长加长时又要求天线的有效面积增加,而其又导致作用距离加大。式3虽然给出了雷达作用距离与各参数的定量关系,但在雷达的实际工作环境中,还有两个无法准确确定的量:目标有效反射面积σ和最小可检测信号Simin,因此通常是将它作为一个估算公式,对雷达各参数对作用距离的影响进行考察。
1.2.2目标的雷达截面积雷达是通过目标对雷达波的二次散射功率来发现目标的,故目标的雷达截面积如公式4所示:

式4表达的意思为:平面波照射条件下,接收机处每单位立体角内得到的反射功率再乘4π就是待测目标处每单位的入射功率密度。
1.2.3系统损耗在雷达系统目标侦测的过程中,会有射频传输损耗、天线波束形状损失、叠加损失、设备不完善损失及其它损失[7,8]。将各种损失引入公式3,可以得到实际情况下雷达的最大作用距离,具体如公式5所示:

式中,τ表示接收机噪声带宽的倒数,Gt,Gr表示天线增益,Fn表示接收机噪声系数,D0表示检测因子,CB表示带宽校正因子,L表示雷达各部分的损失系数。在估算目标距离时,射机功率、天线增益、工作波长、接收机噪声系数以及接收机噪声带宽均为已知;而目标散射截面积能够依据待测目标来确定,首先在雷达方程中采用其平均值代入,然后计算它的起伏损失;CB和损失L能够依据雷达设备的具体情况查表或估算得出;检测因子的值与检测质量、目标起伏特性以及积累脉冲数及积累方式因素有关,能够依据具体的检测条件计算得出。将上述这些因素考虑在内,按公式5的雷达方程就能够估算出自由空间内雷达的最大作用距离。
1.2.4方程计算以式5为雷达方程,取玻尔兹曼常数k=1.3806505*10-23J/K,T0=300 K,Fn=5 dB,D0=20 dB,CB=1,L=15 dB,Gt=Gr=20 dB,σ=30 dB,λ=0.1m。然后分别对常用的雷达脉冲宽度80 ns,250 ns和900 ns进行计算,发射功率Pt与雷达最大作用距离的计算结果如图1~3所示:

图1 τ=80ns时量程与发射功率的关系Fig.1The relation between Rmaxand Ptwhenτ=80ns

图2 τ=250ns时量程与发射功率的关系Fig.2The relation between Rmaxand Ptwhenτ=250ns

图3 τ=900ns时量程与发射功率的关系Fig.3The relation between Rmaxand Ptwhenτ=900ns
从图1~3中可以看出,在τ=80 ns时,量程为10 km时雷达的发射功率约为100W左右;在τ=250 ns时,量程为10 km时要求雷达的发射功率约为32W左右;在τ=900 ns时,在发射功率约为2500W时,雷达的量程能够达到40 km以上。综合考虑到雷达总体指标与成本,选取τ=250 ns,Pt=32W作为本文所设计雷达系统的脉冲宽度和发射功率。
为了计算接收机的接收功率,取Pt=32W,σ=30 dB,λ=0.1m。计算得出雷达系统在最大作用距离Rmax=10 km时,接收机的接收功率Pr=-98 dBm。由于解调器通常采用二极管,所以二极管的必要输入功率一般为0 dBm(约为1mW),故通过输送给二极管的功率和接收机输入端口的最小功率就能够计算出接收机各级的增益值大小。
2 雷达系统指标设计
2.1发射机指标设计
综合民用船用雷达系统的总体指标、雷达方程和测距方法,提出雷达发射机的设计指标(表1)。

表1 发射机链路指标Table 1 Indexes of transm itter circuit
发射机系统链路框图如图4所示:

图4 发射机系统框图Fig.4 The transm itter system
2.2接收机指标设计
综合民用船用雷达系统的总体指标、雷达方程和测距方法,提出雷达发射机的设计指标(表2)。

表2 接收机链路指标Table 2 Indexesof receiver circuit
接收机系统链路框图如图5所示:

图5 接收机系统框图Fig.5Receiver system
3 关键模块实现及仿真
3.1频率源的设计
本文采用微波锁相频率源,锁相器为ADF4153分数N分频锁相器,该芯片的工作频率高,可以通过高频系统的倍频装置使频率源系统结构简化,进而降低设备成本和功耗。该芯片的射频频率高达4GHz,最大鉴相频率为32MHz,相位噪声基底能够达到-214 dBc/Hz;而且该芯片具有3线串行接口,能够通过外接单片机进行控制;参考晶振频率选取10MHz,环路带宽选择200 kHz、相位裕量选择450、则输出频率的中心频率为3GHz、鉴相频率为20MHz、电荷泵的增益为5mA,压控振荡器灵敏度选择90MHz/V。
3.2限幅器的设计
根据民用船用雷达系统的需求,要求限幅器具有1000W以上的抗烧毁功率,因此第一级限幅二极管的脉冲抗烧毁功率必须大于1000W。根据此要求,最终决定采用MA-COM公司的MA4L401为雷达系统限幅器的第一级限幅二极管,其为台式封装结构,适用频率可高达9GHz,理论上能够承受2000W的脉冲功率冲击。
3.3低噪声放大器的设计
3.3.1放大管的选择放大管使用近年来应用广泛的场效应晶体管,通过比较最终采用最终选择了Aglient公司的ATF-54143型号场效应晶体管。在3GHz处,采用3V,60mA偏置时,匹配良好的直流偏置电路理论上能够达到的最佳性能的噪声系数大小为0.6 dB、增益大小为14.5 dB、输出1 dB的压缩点大小为20.5 dBm,能够满足民用船用雷达系统的使用需求。
3.3.2稳定性分析采用ADS仿真软件对管子的稳定性进行分析,若K>1则表示管子绝对稳定。本文所设计的低噪声放大器稳定性系数K,在2.5~3.5GHz的频段范围内,K均大于1,因此无需再进行管子的稳定性设计。
3.3.3匹配电路的设计考虑到噪声、增益、电路体积等,最终选用性能优良、结构简单且调试方便的L型匹配结构。对于各级间的匹配,通过一个电容与电阻的并联RC低通网络来实现阻抗变换,同时降低增益滚降,进而增加工作频段的低端稳定性。将理想微带线转换成实际使用的带有物理长度的微带线。表3为匹配微带线的电长度对应的相移量和计算的物理长度,全部微带线的特征阻抗大小均为50Ω。

表3 匹配微带线的电长度和物理长度对应关系Table 3 The corresponding relation between electric and physical lengthsmatchingm icro-strip line
3.3.4低噪声放大器的仿真对设计的低噪声放大器进行稳定性、最大增益及噪声系数等参数的仿真,仿真结果如下:在3GHz处,最大增益为约为17.578 dB,噪声系数约为0.8 dB,放大器的输入、输出反射系数均在-15 dB以内,并且整个电路的稳定性较高,很好的满足了雷达系统的设计指标。
本节设计的低噪声放大器工作频率为2.5~3.5GHz,在工作频带范围内达到了增益G>15 dB,噪声系数NF<1.0 dB,输入输出驻波比小于1.5,很好的完成了雷达系统的设计指标。
3.4混频器的设计
3.4.1分支桥定向耦合器设计本文设计的分支桥定向耦合器,在3GHz工作频率时,S11曲线与S12曲线的值均在-35 dB以下,这就说明耦合器的端口隔离度和端口反射系数都能够达到要求。1端口到4端口、1端口到3端口有3 dB左右的信号衰减,但仍然满足雷达系统的设计要求。
3.4.2混频器总电路特性仿真
3.4.2.1滤波器的功能仿真雷达系统的射频信号频率为3.0GHz,本振信号频率为2.94GHz,因此中频信号的频率应为60MHz,仿真结果如图6所示,从图中可以输出信号的频谱中含有该频率成分,功率值大小约为-43 dBm,这就说明混频器功能正常。
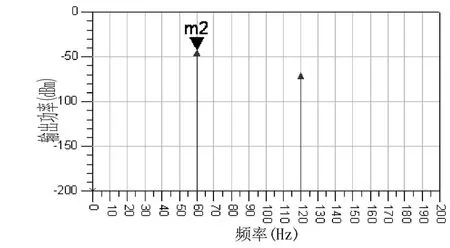
图6 混频器输出特性Fig.6Output characteristicsofm ixer
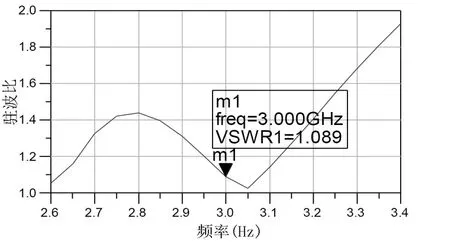
图7 混频器的输入驻波比Fig.7 Input standing-wave ration ofm ixer
3.4.2.2本振功率的选择混频器的本振功率大小对混频器的性能有非常大的影响。对本振功率进行扫描,扫描范围定位0~15 dBm。扫描结果显示:当本振功率大小为12 dBm时,输出信号中的中频信号功率达到峰值,峰值大小为-43 dBm,变频损耗大小为3 dB。
3.4.2.3混频器的输入驻波比仿真从图7中能够看出,当雷达的工作频率为3GHz时,混频器的输入驻波比大小为1.089。
本节设计的混频器,其射频频率大小为3.0GHz,本振频率大小为2.94GHz,射频端口至本振端口的隔离度高于35 dB,且本振端口至中频端口的隔离度也高于35 dB。当射频输入功率大小为-40 dBm、本振功率大小为12 dBm时,输入驻波比为1.089,混频损耗为3 dB,很好的满足了雷达系统对混频器的要求。
4 总结
目前我国民用船用导航雷达系统多为日本产品、价格较高。因此如何实现高性能、低成本的国产导航雷达是一项非常重要的工作。本文在对测距原理和雷达方程进行分析的基础上,完成了一套基于3.0GHz频率的S波段船用导航雷达系统的初步方案设计,确定采用多重脉冲重复频率测距算法进行目标的测距,同时给出了雷达发射机、接收机的主要功能模块的实现方案。但本文设计的雷达系统的初步方案都是在比较理想的情况下获得的,实际工作中往往难以达到,而且雷达通常工作在较为复杂的环境中,所以在后续的工作中,接收机、发射机的性能等指标都应留有一定的余量。
[1]Thomas B,Rea S,Moyna B,et al.A 320-360 GHz Sub-harmonically Pumped Image Rejection M ixer Using Planar Schottky Diodes[J].IEEEM icrowave&W ireless Components Letters,2009,19(2):101-103
[2]刘璟怡,费元春.S波段低噪声放大器CAD设计[J].现代雷达,2004,26(5):59-61
[3]Halim MHC,Aziz MZAA,Othman AR,et al.Low Noise Amplifier for front end transceiver at 5.8 GHz[C].Penang:InternationalConference on Electronic Design,2008:1-4
[4]王飞,马胜前.S波段锁相频率合成器的设计[J].安徽职业技术学院学报,2009,8(4):16-19
[5]杨爱军,王红艳.分布式雷达产品生成系统设计[J].山东农业大学学报:自然科学版,2011,42(4):543-545
[6]张迎春.宽带高增益低噪声放大器[J].低温与超导,2007,35(3):269-273
[7]齐国清,索继东,张润泽.船舶导航雷达新技术及发展预测[J].大连海事大学学报:自然科学版,1998,24(3):54-58
[8]徐俊艳,何友,杨卫华.基于小波和神经网络的雷达目标识别方法研究[J].山东农业大学学报:自然科学版,2005,36(2):290-292
Research and Implementation of S Band Marine Navigation Radar System Based on 3.0 GHz Frequency
MA Tian-m ing
SchoolofNavigation/Wuhan University ofTechnology,Wuhan 430063,China
Aim ing at the problem of the high price of domestic civil marine radar navigation system,a S band marine navigation radar system based on 3.0 GHz frequency was designed.Based on the analysis of the principle of distance and distance ambiguity,themethod ofmultiple pulse repetition frequency ranging algorithm was used to carry out the target distancemeasurementand the calculation formula of the radar equation was given.Then the design index of the transm itter and the receiver of radar system was analyzed and put forward the specific design index system.Finally,radar system w ith the frequency source,low noise amplifier and mixer was realized and simulated.The simulation results showed that the design based on 3.0GHz frequency S-band ship in navigation radar system indicatorswellmetw ith the design requirements.
3.0GHz frequency;marine radar;index
TN202
A
1000-2324(2016)04-0548-05
2016-01-12
2016-03-28
马天明(1995-),男,山东龙口人,本科,主要研究方向为风景园林规划设计、建筑设计.E-mail:mtm950501@126.com
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
数字通信世界(2020年5期)2020-06-15
电子制作(2019年19期)2019-11-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
电子制作(2017年7期)2017-06-05
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
浙江大学学报(工学版)(2016年9期)2016-06-05
