
多分辨率交通仿真模型综述
2016-09-20 08:32张丽岩李克平
公路工程 2016年4期
马 健, 张丽岩, 李克平
(1.苏州科技学院 土木工程学院, 江苏 苏州 215011; 2.同济大学 交通运输工程学院、同济大学 道路与交通工程教育部重点实验室, 上海 200092)
多分辨率交通仿真模型综述
马健1,2, 张丽岩1,2, 李克平2
(1.苏州科技学院 土木工程学院, 江苏 苏州215011;2.同济大学 交通运输工程学院、同济大学 道路与交通工程教育部重点实验室, 上海200092)
研究了多分辨率交通仿真相关理论的国内外主要研究成果,包括单分辨率交通宏观、中观、微观模型研究、混合交通模型研究及多分辨率交通模型研究。首先对研究现状进行梳理、归纳、分析和总结;同时,对不同模型的特点、应用条件等进行了总结与分析;最后,通过综合分析与评述,指出目前多分辨率交通仿真理论的主要成果和不足,为后续的研究奠定了基础并指明了方向,具有很高的理论指导意义。
交通仿真; 宏观模型; 中观模型; 微观模型; 多分辨率; 单分辨率; 交通模型
0 引言
随着ITS(Intelligent Transport System)技术在交通相关领域研究应用的不断深入,交通管理逐步趋向动态化、信息化和智能化,交通参与者对交通模型精度和效率的要求日益提高。传统交通模型不能或不足以有效处理交通系统在多粒度层面上的模拟仿真,而基于多分辨率建模理论、以集成仿真为手段建立的多分辨率交通模型为解决这些问题提供了一个新的思路和途径。它可以更好地平衡不同粒度下建模的深度与广度,进而平衡仿真的精度与效率,避免了传统仿真“只见树木,不见森林”或者“只见森林,不见树木”的局限性。
本文通过对交通多分辨率理论的研究,从宏观、中观、微观3个不同粒度层面对交通仿真理论和技术进行概括,对不同粒度上的交通仿真各自的适用条件、应用范围、优点与不足进行总结;并从单分辨率交通模型,混合交通模型以及多分辨率交通模型3个不同的角度对多分辨率交通仿真进行综合比较分析研究,具有重要的理论指导意义。
1 单分辨率交通模型综述
所谓单分辨率交通模型,即其为某一特定粒度下的交通模型,主要包括宏观、中观和微观交通模型;宏观模型是对研究对象的粗粒度描述,微观模型是对研究对象的细粒度描述,而中观模型介于两者之间。下面对三者分别加以概述。
1.1宏观模型概述
宏观模型通常将运行的交通车辆与流体相比拟,利用两者的相似性来分析与建立适应交通流特点的模型。目前,国内外学者在交通模型的研究上,大多是在运动学模型的基础上,根据对交通动力学特性的抽象不同,得到不同的动力学模型。交通动力学模型种类非常多,为了研究方便,本文根据动力学模型的表示形式及各向同性(各向异性)性质将其分成密度梯度模型(各向同性模型)、速度梯度模型(各向异性模型)等进行分类讨论。
1.1.1各向同性动力学模型
各向同性动力学模型的控制方程可以表示为如下形式:
(1)
式中:u为车流平均速度,k为交通密度,x和t分别表示空间和时间。ue(k)为平衡状态下平均速度u与交通密度k之间的关系,Tr为弛豫时间或松弛时间,F(k,u)为松弛项中的密度梯度系数项,H为方程的期望项系数,G(k,u)为方程的粘性项或非齐次项。由于这类模型右端都有密度梯度项∂k/∂x,故也称之为密度梯度模型。本文将具有代表性的可统一成密度梯度模型的动力学方程进行汇总,其所对应的F(k,u)、H和G(k,u)的具体形式见表1。

表1 各向同性动力学模型形式化汇总列表及特点分析Table1 Summaryandcharacteristicsanalysisofisotropicdynamicmodels序号模型名称F(k,u)HG(k,u)时间特点1Pipes模型[1]-k·u'e(k)001969最早的动力学模型2Payne模型[2]γTr101971延迟处理;前瞻效应;高密度下稳定性差3Papageorgiou模型[3]γTr1-δusk1983基于Payne模型;考虑匝道流量4Kühne模型[4]F(k,u)k1v2u2x1984模型加入速度二阶导数项;可用于拥挤状态5Ross模型[5]00-u-ufT1988不依赖ue;只能描述加速场景;不适合拥挤状态6Michalopoulos模型[6,7]v·kβ+10ϕT(uf(x)-u)-G1993弛豫时间变量化;不同场景适应性高7Kerner-Konhäuser模型[8,9]F(k,u)1μk2u2x1993解释“幽灵式交通阻塞”;参数敏感性高8ZhangH.M.模型[10]-k·u'e(k)101998解释“时停时走”交通现象;兼容Ross模型9冯苏苇模型[11]F(k,u)ϕe-ϕAkkcrAaheadu21997引入道路面积可变化效应;解释停车对交通“瓶颈”影响10徐伟民模型[12]00-1kPx2002引入交通压力;合理性有待验证11葛红霞模型[13]-u'e(k)+b0·u'e(k)Tr(b0为正的常数)1b0·u'e(k)Tr·k22k2x(b0为正的常数)2006引入粘性项概念;模型数值解及有效性有待进一步验证 注:除名称已有约定或特定情况外,本文为简便起见,模型以文章的第一作者命名,下同。
对于上述的绝大多数模型,系统的特征速度总有一个大于车流的平均速度u,从而导致与该特征速度相关的膨胀波或激波总是从后面向前传播并到达前面的车辆,即后车的扰动会影响前车的行为,这与实际交通情况是相违背的。实际车流是各向异性的,驾驶员主要对来自前方的刺激进行反应而不太受后车行为的影响。然而,当特征速度超过车速时,就会导致“类气体行为”,这一问题在某些条件下会导致车辆会出现倒退的现象。对此,美国学者Daganzo提出了强烈的质疑[14]。
1.1.2各向异性动力学模型
各向异性动力学模型的控制方程可以表示为如下形式:
(2)
式中:F(k,u)为松弛项中速度梯度系数项,H为方程的期望项系数,G(k,u)为方程粘性项或者非齐次项。由于这类模型右端都有速度梯度项∂u/∂x,故也称之为速度梯度模型。本文将具有代表性的可统一成速度梯度模型的动力学方程进行汇总,其对应的F(k,u)、H和G(k,u)的具体形式见表2。
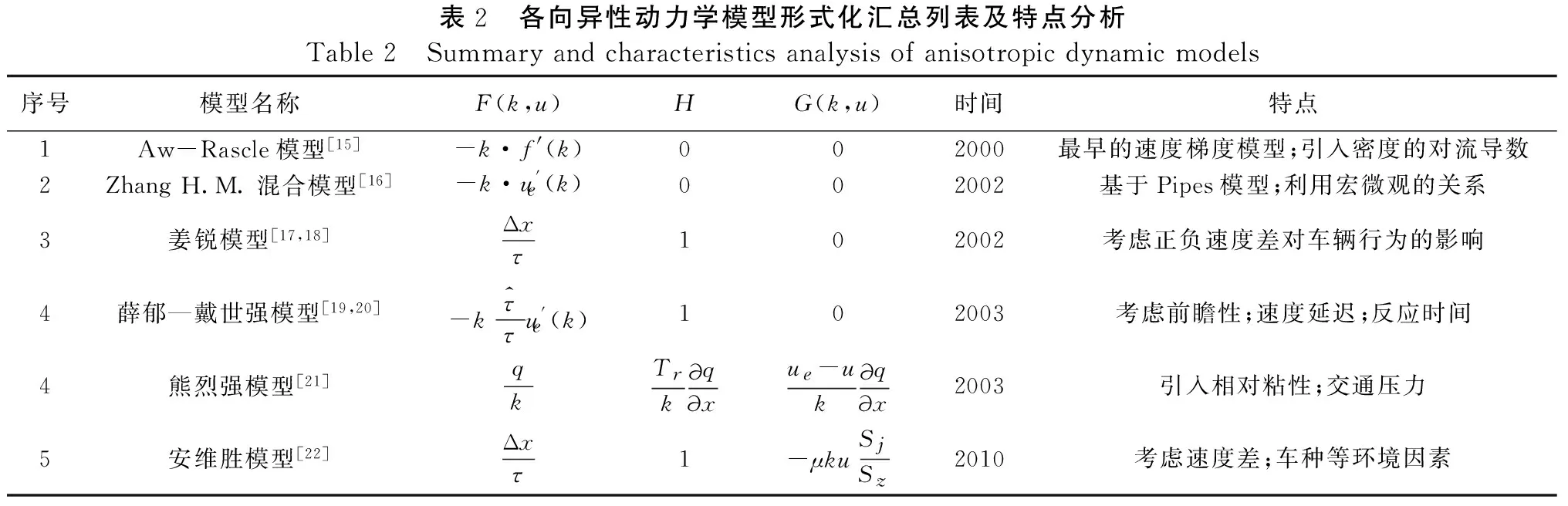
表2 各向异性动力学模型形式化汇总列表及特点分析Table2 Summaryandcharacteristicsanalysisofanisotropicdynamicmodels序号模型名称F(k,u)HG(k,u)时间特点1Aw-Rascle模型[15]-k·f'(k)002000最早的速度梯度模型;引入密度的对流导数2ZhangH.M.混合模型[16]-k·u'e(k)002002基于Pipes模型;利用宏微观的关系3姜锐模型[17,18]Δxτ102002考虑正负速度差对车辆行为的影响4薛郁—戴世强模型[19,20]-kτ^τu'e(k)102003考虑前瞻性;速度延迟;反应时间4熊烈强模型[21]qkTrkqxue-ukqx2003引入相对粘性;交通压力5安维胜模型[22]Δxτ1-μkuSjSz2010考虑速度差;车种等环境因素
对于上述的绝大多数模型,系统的特征速度小于车流的平均速度u,从而导致与该特征速度相关的膨胀波或激波虽总是从后面向前传播,但并不能到达前面的车辆,即后车的扰动不会影响前车的行为,这与实际交通情况是相符合的。实际车流是各向异性的,驾驶员主要对来自前方的刺激进行反应而不太受后车行为的影响。所以,当特征速度小于车速时,并不会导致“类气体行为”,车辆也不会出现倒退的现象[15]。
1.2微观模型概述
交通流的微观模型是以单个车辆为基本研究单元,着眼于单个车辆在相互作用下的个体行为描述与分析,主要包括跟驰模型和元胞自动机模型。国内外的许多学者在这一领域的各个方面都进行了深入的研究,对交通流微观模型的研究积累了很多成果。典型的微观模型如表3所示。

表3 微观模型汇总列表及特点分析Table3 Summaryandcharacteristicsanalysisofmicro-models序号模型名称种类时间特点1Reuschel-Pipes模型[1,23]跟驰模型(刺激-反应)1950最早的跟驰模型;只考虑了两车速度差;不能描述单个车辆的行为2Chandler模型[24]跟驰模型(刺激-反应)1958引入延迟效应;稳定性分析3Gazis模型I[25,26]跟驰模型(刺激-反应)1959着眼于拥挤道路4Edie模型和GHR模型[27]跟驰模型(刺激-反应)1961可扩展模型原型5Newell模型[28]跟驰模型(安全距离)1961假定后车速度依赖于车头间距;可能出现无限加速度情况6Wiedemann模型[29]跟驰模型(心理间距模型)1974后车行为依赖于车头间距;后车行为分为四种情况7Bando模型[30]跟驰模型(安全距离)1995优化速度模型;解决了无限加速问题;可以模拟多种特性;避免红灯转绿灯的不合理加速度现象8Helbing-Tilch模型[31]跟驰模型(安全距离)1998标定Bando模型;提出广义力模型;添加速度差项;延迟时间长9Treiber模型[32]跟驰模型(刺激-反应)2000解决了最优速度模型的可能追尾问题;增加相对速度;易标定、数值计算高效10姜锐模型[33]跟驰模型(刺激-反应)2001基于Helbing-Tilch模型;加速度合理;延迟时间正常11薛郁模型[34,35]跟驰模型(刺激-反应)2002基于Bando模型;考虑相对速度对加速度的影响12184号模型[36,37]元胞自动机1983最早利用元胞自动机研究交通流;规则简单;能很好描述相变现象;各种元胞模型后续研究的基础13NaSch模型[38]元胞自动机1992基于184模型;考虑了车辆加速及随机慢化
刺激反应模型、心理间距模型及安全距离模型有其各自特点,元胞自动机模型也越来越受到各国学者的重视。由于微观交通模型的建立与校正需要采集大量的基础数据和耗费巨额的计算成本,所以比较适用于小范围、精确度高的仿真中,难以被应用到中、大规模的路网上;另外,这类模型对实时性要求较高的场合也不适宜使用。
1.3中观模型概述
中观模型是一种介于宏观与微观之间的道路交通流模型,以车辆群体为研究对象,通常以车队或车群为单元来研究交通的特性,故一般具有较高的运行效率及相对较大的仿真规模。中观交通流模型主要特征是非集计的车辆表示和简化的车辆运动行为。一方面,中观模型与微观模型一样,能够描述路网中的车辆,具有较大的灵活性;另一方面中观模型简化了单个车辆之间的相互作用,提高了计算效率。这一特征赋予中观仿真模型独特的优势[39]。中观模型的种类很多,主要有以下几类:基于气体动力论的中观模型、CTM模型、基于车头时距分布的中观模型及基于微观模型扩展的中观模型。目前具有代表性的中观模型如表4所示。
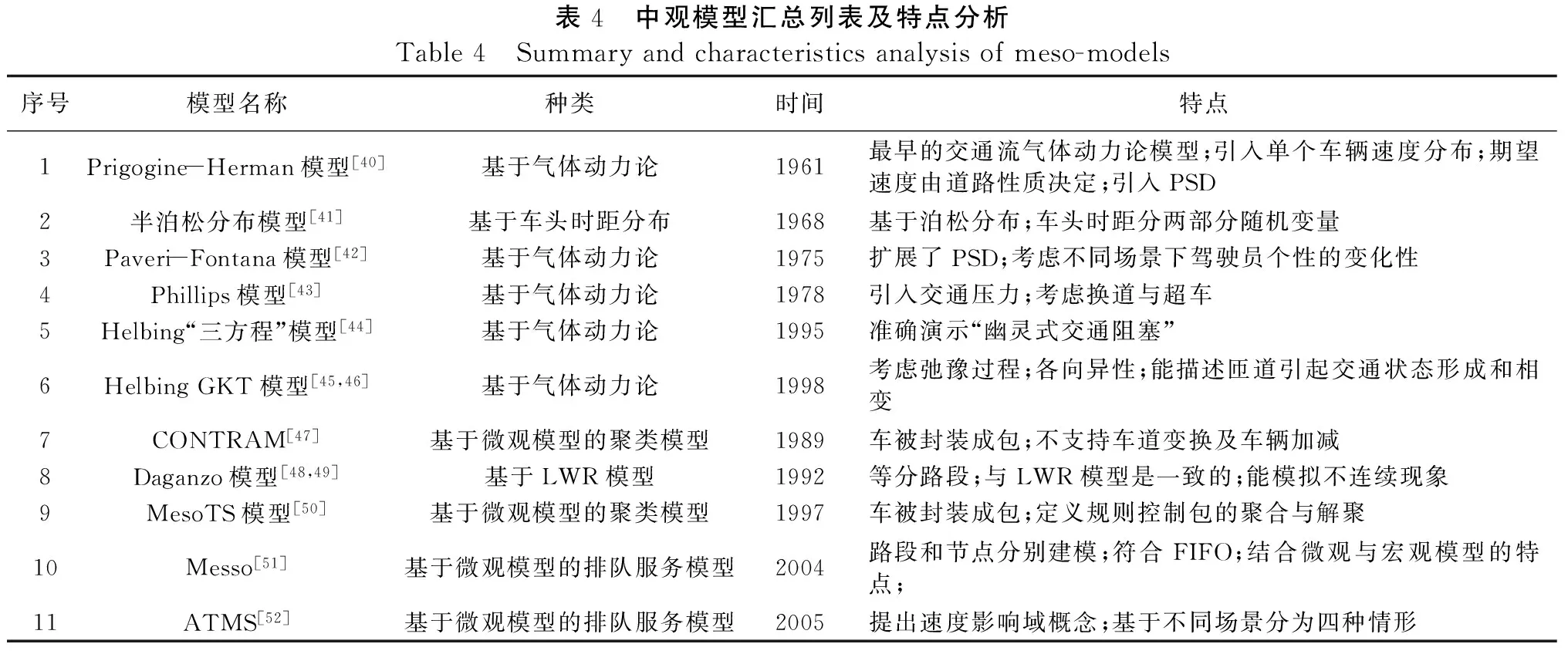
表4 中观模型汇总列表及特点分析Table4 Summaryandcharacteristicsanalysisofmeso-models序号模型名称种类时间特点1Prigogine-Herman模型[40]基于气体动力论1961最早的交通流气体动力论模型;引入单个车辆速度分布;期望速度由道路性质决定;引入PSD2半泊松分布模型[41]基于车头时距分布1968基于泊松分布;车头时距分两部分随机变量3Paveri-Fontana模型[42]基于气体动力论1975扩展了PSD;考虑不同场景下驾驶员个性的变化性4Phillips模型[43]基于气体动力论1978引入交通压力;考虑换道与超车5Helbing“三方程”模型[44]基于气体动力论1995准确演示“幽灵式交通阻塞”6HelbingGKT模型[45,46]基于气体动力论1998考虑弛豫过程;各向异性;能描述匝道引起交通状态形成和相变7CONTRAM[47]基于微观模型的聚类模型1989车被封装成包;不支持车道变换及车辆加减8Daganzo模型[48,49]基于LWR模型1992等分路段;与LWR模型是一致的;能模拟不连续现象9MesoTS模型[50]基于微观模型的聚类模型1997车被封装成包;定义规则控制包的聚合与解聚10Messo[51]基于微观模型的排队服务模型2004路段和节点分别建模;符合FIFO;结合微观与宏观模型的特点;11ATMS[52]基于微观模型的排队服务模型2005提出速度影响域概念;基于不同场景分为四种情形
中观交通仿真模型解决了以往宏观交通仿真模型不能描述排队长度和延误等详细交通状态指标,以及微观交通仿真模型不能描述OD对大规模交通系统产生的影响等问题,所以中观仿真模型在交通领域有着其独特的优势[53]。
与宏观模型相比,在一定程度上中观模型能够包含更多车辆(群)相互作用的细节;而与微观模型相比,由于中观模型不关注单个车辆的动力学特性,因此,具有更好地计算效率[54-56]。目前,绝大多数先进的用于离线或在线交通预测的系统均采用中观模型作为核心仿真器。中观模型沟通了微观世界和宏观世界,对中观模型的研究能进一步促进对交通现象本质的理解。
2 多分辨率交通仿真模型研究进展
由于单分辨率交通仿真有其固有的局限性,使得多分辨率交通仿真受到越来越多的重视,逐渐成为交通仿真领域的研究热点。关于多分辨率交通仿真,可以从混合模型的不同粒度层次来划分为“两层混合模型”及“三层及以上混合模型”。对于同一分辨率层次的两个及以上模型的混合则不属于多分辨率仿真模型。下面具体介绍不同粒度层次的混合仿真模型。
2.1两层混合模型研究进展
2.1.1宏观与微观混合交通模型
此类模型的核心思想是:用宏观模型仿真全路网,只对部分路段或子路网进行微观仿真,在微观模型边界处对交通流的描述进行聚合解聚。此类模型的代表性研究包括:Lerner[57](2000)实现了微观模型PELOPS与宏观模型SIMONE的混合,论文讨论了从宏观模型到微观模型的随机解聚方法以及从微观模型到宏观模型的聚合方法;Mange[58](2000)实现了微观模型SITRAB+与宏观模型SIMRES的混合,着重研究了跟车模型与宏观模型可同时满足的五项限制,从而探讨了宏观模型与微观模型的兼容性;Ludovic[59](2007)提出了基于LWR原则的宏观与微观模型,探讨了宏观模型指标与微观模型指标间的一致性和转换问题;此类模型着重于宏观和微观模型在理论上的一致性,较少地关注不同分辨率模型优势的发挥。
2.1.2中观与微观混合交通模型
此类模型的核心思想是:分别用中观模型与微观模型仿真部分路网,采用特定手段在边界节点处实现从中观至微观及微观至中观的转换。此类模型的研究是当前交通系统混合仿真的研究热点。早期的研究成果有Jayakrishnan[60](2001)等人实现的微观PARAMICS模型与中观DYNASMATR模型的混合,其中强调了微观模型不适合用来描述路径选择行为;Nizard[61](2002)实现了微观MITSIMLab模型与中观Metropolis模型的混合,并着重研究了利用微观模型仿真结果对中观模型进行校正;Wilco Burghout[51](2004)提出的MiMe混合模型实现了微观模型MITSIMLab与中观模型Messo的混合,不但讨论了两种模型边界的接口(属性映射)问题,同时探讨了利用虚拟路段思想进行出行中动态路径选择的方法;Huajing SHI[62](2006)实现了中观CTM模型与微观离散跟车模型的混合;DynaCHINA[53](林勇等,2010)是山东科学院自动化研究所林勇博士自主研发的动态网络交通流分析与实时路况预测系统,其基本原理是中微观层次的参数根据模型中宏观层次的交通参数而确定。
此类模型是当前交通系统混合仿真研究的热点,但是此类研究往往基于跨分辨率交互,使得这类模型存在扩展性(如在此基础之上实现DTA)和稳定性(系统的高耦合性)方面的问题。目前,交通混合模型的研究越来越受到国内外学者的重视,同时,在该领域的各个方面也取得了一定的成果,其中具有代表性的两层混合模型见表5。

表5 两层混合仿真模型汇总列表及特点分析Table5 Summaryandcharacteristicsanalysisoftwolevelhybridtrafficsimalationmodel序号模型名称种类时间特点1Lerner[57]宏观与微观模型的整合2000微观模型PELOPS与宏观模型SIMONE的整合2Mange[58]宏观与微观模型的整合2000微观模型SITRAB+与宏观模型SIMRES的整合;重点讨论微观模型与宏观模型的兼容性3Ludovic[59]宏观与微观模型的整合2007宏观LWR及基于其的微观模型的整合;参数的一致性和转换问题4Jayakrishnan[60]中观与微观模型的整合2001微观PARAMICS模型与中观DYNASMATR模型的整合5Nizard[61]中观与微观模型的整合2002微观MITSIMLab模型与中观Metropolis模型的整合6WilcoBurghout[51]中观与微观模型的整合2004微观模型MITSIMLab与中观模型Messo的整合7HuajingSHI[62]中观与微观模型的整合2004中观CTM模型与微观离散跟车模型的整合8DynaCHINA[53]宏观与微观模型的整合2010动态网络交通流分析;实时路况预测
两层混合交通模型,往往是两种不同粒度仿真模型的整合,能够充分利用不同模型的优点,克服或减少单个模型的缺点与不足,最大化的满足应用的需要。但是,随着实际交通需求的发展,简单的两层混合模型已经不能适应现实的要求,采用更合理的建模思想、建模方法来发展多次层的多分辨率交通混合模型是未来发展的方向和研究热点,以满足日益提高的理论研究与实际应用需要。
2.2三层及以上混合模型研究进展
通过普通的模型混合方法比较适合建立两层混合模型,但是用来建立三层及以上混合模型就显得有点力不从心了。这就需要采用新的建模思想、建模理论和建模方法来建立这种多层次多粒度的混合模型,多分辨率建模理论就是其中之一。多分辨率建模(Multiple Representation Modeling,MRM)是20世纪90年代以来国际上建模与仿真领域的研究热点,目前已经成为美国海军进行大规模仿真的关键技术之一;美国国家科学研究委员会认为多分辨率建模是现代建模与仿真技术所面临的最基本的挑战之一[63]。
2.2.1多分辨率建模方法
在多分辨率建模的研究中,建模方法是研究的重点内容之一,这些方法为多分辨率交通仿真提供了方法论基础。其中,比较有影响的有:聚合解聚法(Aggregation/Disaggregation)、视点选择法(Select Viewing,SV)、UNIFY方法、综合层次化可变分辨率建模法(Integrated Hierarchical Variable-Resolution Modeling,IHVR)及跨分辨率交互法(Cross-Resolution Interaction)等。具有代表性的多分辨率建模方法见表6。
2.2.2多分辨率交通模型
目前,多分辨率建模理论还不是很成熟,但也出现了一些成功的应用,彰显了多分辨率建模广泛的应用前景及研究价值。在多分辨率建模应用领域,具有代表性的工作包括:Davis[75](1998)等人应用多分辨率建模理论进行模型分析,进而提出了基于多分辨率模型的探索性分析(Exploratory Analysis);Lee K.和 Fishwick P.A.[76](1999)等人研究了多分辨率建模在实时系统中的应用;Sekine S.等人[77](2001)研究了多分辨率建模在交通系统仿真中的应用。Schaffer[78,79](1998)和Butler[80](2002)分别研究了综合自然生态环境中的多分辨率建模问题;Reynolds[81](2002)研究了气象和海洋建模中的多分辨率问题等等。
我国自20世纪90年代中期对国外多分辨率建模理论进行了跟踪研究,并对多分辨率建模在作战模拟领域的应用进行过探索性研究,但系统性研究还不够。近年来,国内对于多分辨率交通仿真模型的研究正如火如荼地展开,但总体而言还处于起步阶段。
目前多分辨率交通仿真领域具有代表性的研究是Transmodeler[82](Yang Q.& Slavin H.,2002),它是著名交通仿真/规划软件TransCAD的一个软件包。该仿真工具整合了宏观、中观、微观三种粒度层面的交通模型,用户可自由选择路段的粒度,对其不同组成部分或地段同时实现不同粒度的仿真,并保持仿真系统在不同粒度下协同运行。该模型可以使用户在仿真粒度和计算速度,在评价指标的详细程度和模拟对系统的整体影响之间酌情取舍,灵活地解决仿真项目的具体要求。但是,由于多分辨率交通建模研究刚刚兴起,尤其在交通领域,所以还没有学术文献进行系统的阐述与分析。对于Transmodeler,其使用手册中说明该模型实现了宏观、中观与微观的整合,但由于涉及商业机密限制及相关专利的保护,无法一窥其中的奥妙。这也正说明了多分辨率交通仿真研究的重要性及可行性。
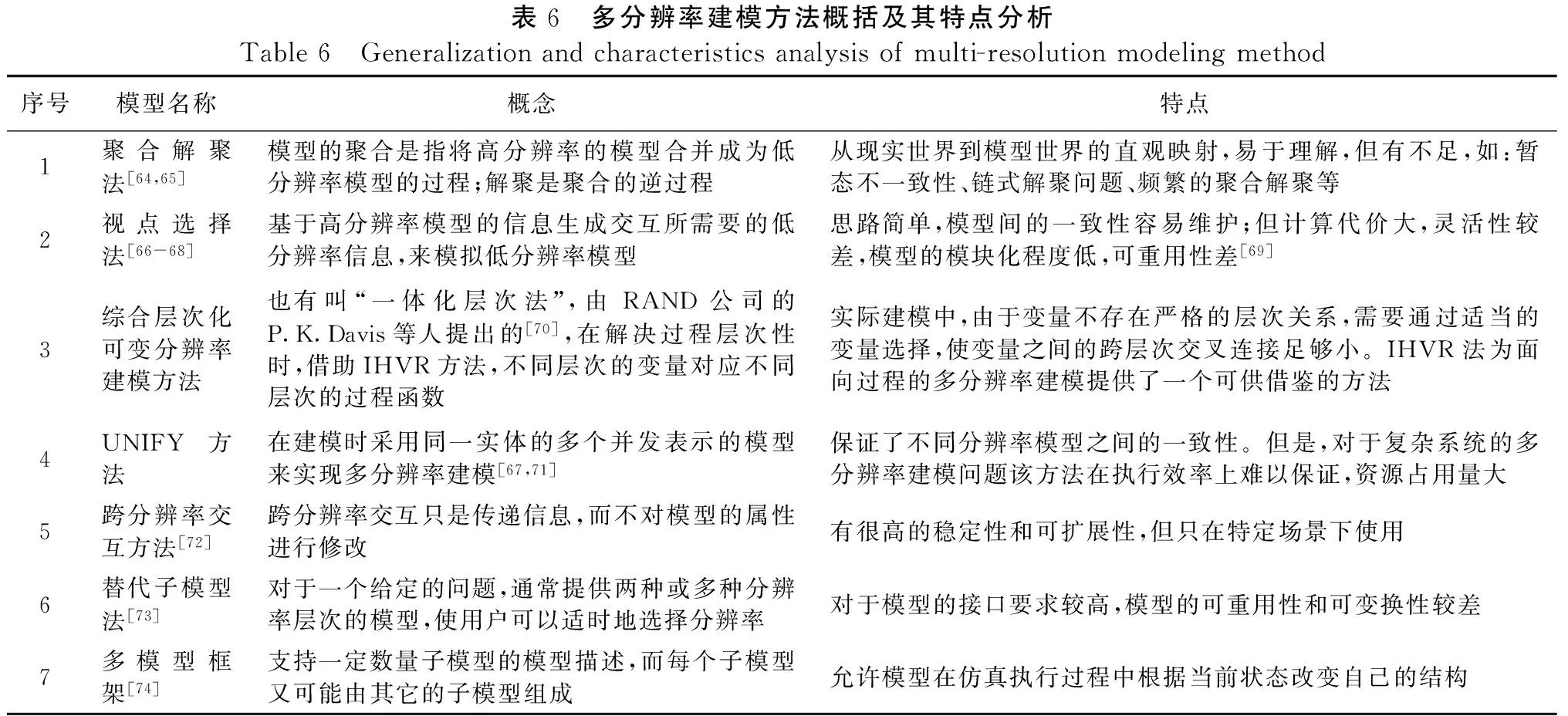
表6 多分辨率建模方法概括及其特点分析Table6 Generalizationandcharacteristicsanalysisofmulti-resolutionmodelingmethod序号模型名称概念特点1聚合解聚法[64,65]模型的聚合是指将高分辨率的模型合并成为低分辨率模型的过程;解聚是聚合的逆过程从现实世界到模型世界的直观映射,易于理解,但有不足,如:暂态不一致性、链式解聚问题、频繁的聚合解聚等2视点选择法[66-68]基于高分辨率模型的信息生成交互所需要的低分辨率信息,来模拟低分辨率模型思路简单,模型间的一致性容易维护;但计算代价大,灵活性较差,模型的模块化程度低,可重用性差[69]3综合层次化可变分辨率建模方法也有叫“一体化层次法”,由RAND公司的P.K.Davis等人提出的[70],在解决过程层次性时,借助IHVR方法,不同层次的变量对应不同层次的过程函数实际建模中,由于变量不存在严格的层次关系,需要通过适当的变量选择,使变量之间的跨层次交叉连接足够小。IHVR法为面向过程的多分辨率建模提供了一个可供借鉴的方法4UNIFY方法在建模时采用同一实体的多个并发表示的模型来实现多分辨率建模[67,71]保证了不同分辨率模型之间的一致性。但是,对于复杂系统的多分辨率建模问题该方法在执行效率上难以保证,资源占用量大5跨分辨率交互方法[72]跨分辨率交互只是传递信息,而不对模型的属性进行修改有很高的稳定性和可扩展性,但只在特定场景下使用6替代子模型法[73]对于一个给定的问题,通常提供两种或多种分辨率层次的模型,使用户可以适时地选择分辨率对于模型的接口要求较高,模型的可重用性和可变换性较差7多模型框架[74]支持一定数量子模型的模型描述,而每个子模型又可能由其它的子模型组成允许模型在仿真执行过程中根据当前状态改变自己的结构
3 综合分析及评述
首先,在单分辨率交通模型中,宏观模型计算效率高,对计算能力要求低,但是不适合模拟需要考虑相邻车辆间相互作用的交通行为;微观模型能细致模拟车辆的运动行为和可视化仿真过程,利于仿真结果分析,但是,路网建模复杂、模型敏感度高且计算能力要求高;中观模型以车队为研究对象,在一定程度上描述车辆之间的相互作用,而且计算能力要求比微观模型低,但是需要平衡好仿真广度与深度的关系。其次,不同粒度的两层混合模型一般是基于参数转换方法来实现的,这在一定程度上结合了单个模型的优点,但是,模型适用性比较差,基础数据处理复杂,扩展性比较弱,实用性不大;三层及以上多分辨率混合交通模型是基于多分辨率建模理论的,不但能够在集成多个模型的优点,还能够提供一个共享的基础数据库,节省单个模型的数据维护成本,为模型间的一致性提供基础。不同模型之间的特点对比见表7[83,84]。

表7 不同分辨率交通仿真模型特点的比较分析Table7 Characteristicsofdifferentresolutiontrafficsimulationmodels比较项目单分辨率交通仿真模型多分辨率交通仿真模型微观中观宏观两层混合交通模型三层及以上混合交通模型理论背景离散事件系统建模,固定步长推进离散事件系统建模,固定步长推进连续系统建模,数值仿真类似于分布式仿真多分辨率建模与仿真理论仿真对象单个车辆单个车辆,按队列驱动将车辆拟为流体或气体取决于混合的模型对象根据需求可动态改变对象核心模型跟驰模型、换道模型、元胞模型排队模型、流密速关系模型、分配模型以由流量守恒规则导出的微分方程描述系统演化规律在原有模型基础上的数学推导或接口标准定义整合不同分辨率模型的一致性维护模型实现方法基于时序方法、基于事件方法数值方法、基于时序方法、基于事件方法数值方法参数转化、部分数据共享集成仿真、多分辨率建模方法应用交叉口渠化、信号配时等微观设计的分析动态路网仿真计算,但仍受路网规模限制大规模路网的规划分析取决于混合的模型从网络级-区域级-路口级的渐进式应用典型系统Vissim,Aimsun,Pa-ramics,CORSIMDynasmart,DynaMIT,Dynameq,TransimsNETFLO2,FREFLODynaCHINATransmodeler
综上所述,交通仿真理论和模型已取得众多研究成果,但是这些研究还存在一些不足,主要体现在如下几方面:
① 在研究对象方面,大多数模型都针对的是高速公路或者普通公路,针对城市快速路的模型较少;同时,由于国内外的交通基础结构和交通构成等不尽相同、交通控制手段存在差异以及交通参与者的性格、素质等特点各不相同,所以,国外模型在国内交通环境中的适用性有待验证。
② 在研究的粒度方面,大多数模型的研究侧重于在某一粒度层次上建立模型,绝大部分模型都属于单分辨率模型,多分辨率模型研究较少,尤其是三层及以上多分辨率模型研究更少;同时,对模型混合的集成方式、种类、方向等问题鲜有研究,这为模型的混合指明了研究方向。
③ 在研究理论基础方面,不同类型的模型的理论基础通常是不一样的,同样,模型的混合有多种不同的理论基础。以往大多混合模型是以模型间的参数转化或过渡部分数据共享为基础的,没有一个系统的混合理论来指引。多分辨率仿真理论为模型的混合提供了一个新的思路和理论基础。但是,该理论的研究及其在交通等领域中的应用还处于起步阶段,还有待进一步的深入研究与分析。
④ 在研究方法方面,以往大多数混合模型是以分界面参数融合为方法基础的,缺乏通用的理论做指导,研究的问题往往是理想情况或特定场景,研究的结论和成果不易扩展,很难应用于实际问题中。而集成仿真理论能够为模型的混合提供一致的方法论基础,更好地利用已有的研究成果,节省成本。这需要深入研究集成仿真理论以便快速低成本地建立并实现多分辨率交通仿真模型。
⑤ 在模型实现方面,现有模型的假设条件牵强,模型控制参数太多,对实际交通的相关因素考虑不全面,与实际道路条件下的交通状况不相符,这就需要对理想条件下的模型进行一系列的调整、修正与改进。
⑥ 在模型优化方面,现有模型的求解通常是极尽简化,模型控制参数常数化,计算结果精度不高,算法效率比较低,在面临仿真实时性与准确性要求较高的现实应用时就不能满足需求了。并行算法能够在保持算法精度的前提下,大大地提高计算的效率,为实时仿真的实现提供了一条可行之路,有待进一步的研究与改进
⑦ 在模型校验方面,大部分模型只是建立在纯粹的数学公式推导上,缺乏有效的实际数据验证和校核,模型对交通系统控制参数的确定和使用与实际的交通状况存在一定的差异。
4 小结
本文通过对当前交通模型的发展现状进行了综合比较研究,从单分辨率交通宏观、中观与微观模型,混合交通模型以及多分辨率交通模型等方面对已有的交通模型进行了总结、归纳和比较评价,具有重要的理论指导意义。
[1]Pipes L A.Vehicle accelerations in the hydrodynamic theory of tra-ffic flow[J].Transpn.Res.,1969,Vol.3(2):229-234.
[2]Payne,H.J.,Models of Freeway Traffic and Control[J].Simulation Councils Proceedings Series:Mathematical Models of Public Systems,1971,Vol.1(1):51-61.
[3]Papageorgiou M.,A hierarchical control system for freeway traffic[J].Transportation Research 17B,1983,3:251-261.
[4]Kühne,R.D.,Macroscopic Freeway Model for Dense Traffic--Stop-Start Waves and Incident Detection[C].In Proceedings of the 9th International Symposium on Transportation and Traffic Theory.VNU Science Press,Utrecht.,1984:21-42.
[5]Ross P., Traffic dynamics[J].Trans.Res.,1988,22B :421-435.
[6]Michalopoulos P.G.,Beskos D.E.& Lin J.K.,Analysis of Interrupted Traffic Flow by Finite Difference Methods[J].Trans.Res.,1984,Vol.(18B):409-421.
[7]Michalopoulos P.G.,Yi P.& Lyrintzis A.S.,Continuum modeling of traffic dynamics for congested freeways[J].Trans.Res.27 B,1993:315-332.
[8]Kerner B.S.,Konhäuser P.,Cluster effect in initially homogeneous traffic flow[J].Phys.Rev.E.1993,Vol.(48):2335-2338.
[9]Kerner B.S.,Konhäuser P.,Structure and parameters of clusters in traffic flow[J].Phys.Rev E,1994,Vol.50(1):54-83.
[10]Zhang H.M.,A theory of nonequilibrium traffic flow[J].Transportation Research Part B:Methodological,1998,Vol.32(7):485-498.
[11]冯苏苇.低速混合型城市交通流的建模、实测与模拟[D].上海:上海大学,1997.
[12]徐伟民,熊烈强.与车辆跟驰理论统一的一维交通流动力模型研究[J].北京:交通运输系统工程与信息,2002,2(1):42-44.
[13]葛红霞.基于诱导信息的交通流动力学特性与非线性密度波研究[D].上海:上海大学,2006.
[14]Daganzo C.F.,Requiem for second-order fluid approximations of traffic flow[J].Trans.Res.,1995,29B:277-286.
[15]Aw A.,Rascle M.,Resurrection of “second order” models of traffic flow[J].SIAM J.Appl.Math.,2000,60:916-938.
[16]Zhang H.M.,A non-equilibrium traffic model devoid of gas-like behavior[J].Trans.Res.,2002,36B:275-290.
[17]姜锐,吴清松,朱祚金.一种新的交通流动力学模型[J].科学通报,2000(45):1895-1899.
[18]Jiang R., Wu Q.S.& Zhu Z.J., A new continuum dynamics model for traffic flow and numerical tests[J].Transportation Research B,2002,36:405-419.
[19]Xue Y.,Dai S.Q.,Continuum traffic model with the consideration of two delay time scales[J].Phys Rev E,2003,68:066123.
[20]薛郁.交通流的建模、数值模拟及其临界相变行为的研究[D].上海:上海大学,2002.
[21]熊烈强.交通流理论及其在高速公路中的应用研究[D].武汉:武汉理工大学,2003.
[22]安维胜.混合交通流动力学建模研究[D].成都:西南交通大学,2010.
[23]Reuschel A.,Vehicle movements in a platoon[J].Oesterreichisches Ingenieur-Archir,1950,4:193-215.
[24]Chandler R.E.,et al,Traffic Dynamics:Studies in Car Following[J].Oper.Res.,1958,6:165-184.
[25]Gazis D.C.,Car following theory of steady state traffic flow[J].Oper.Res.,1959,Vol.9:499-505.
[26]Greenberg H.,An analysis of traffic flow[J].Oper.Res.,1959,vol.7:79-85.
[27]Edie L.C.,Car following and steady state theory for non-congested traffic[J].Oper.Res.,1961,vol.9:66-76.
[28]Newell G.F.,Nonlinear effects in the dynamics of car-following[J].Oper.Res.,1961,9:209-229.
[29]Wiedemann R.,Simulation of road traffic flow[R].Technical report,Reports of the Institute for Transport and Communication,University of Karlsruhe,1974.
[30]Bando M.,Hasebe K.& Nakayama A.,et al,Dynamical model of traffic congestion and numerical simulation[J].Phys.Rev.E,1955,51:1035-1042.
[31]Helbing D.,Tilch B.,Generalized force model of traffic dynamics[J].Phys.Rev.E,1998,58:133-138.
[32]Treiber M.,et al,Congested Traffic States in Empirical Observations and Microscopic Simulations[J].Phys.Rev.E,2000,62:1805-1824.
[33]Jiang R.,Wu Q.S.& Zhu Z.J.,Full velocity difference model for a car-following theory[J].Phys.Rev.E,2001,64:017101.
[34]薛郁,董力耘,袁以武,等.考虑车辆相对运动速度的交通流演化过程的数值模拟[J].物理学报,2002,51(3):492-495.
[35]Xue Y.,Dong L.Y.& Yuan Y.W.,et al,The Effect of the Relative Velocity on Traffic Flow and Phase Transition[J].Theo.Phys.,2002,38(2):230-234.
[36]Wolfram S., Statistical mechanics of cellular automata[J].Reviews of Modern Physics.,1983,Vol.55(3):601-644.
[37]Nagel K., Schreckenberg M., A cellular automaton model for freeway traffic[J].J.DE Phys.,1992,2:2221-2229.
[38]王殿海.交通流理论[M].北京:人民交通出版社,2002.
[39]张丽岩,马健.基于中观仿真的城市快速路速度诱导控制模型研究[J].公路工程,2013(4):70-74.
[40]Prigogine I., Herman R., Kinetic Theory of Traffic Flow[J].Elsevier,Amsterdam,1961:158.
[41]Buckley,D.,A semi-poisson model of traffic flow[J].Transportation Science,1968,vol.2:107-133.
[42]Paveri-Fontana S.L.,On Boltzmann-like treatments for traffic flow,critical review of basic model and an alternative proposal for dilute traffic analysis[J].Trans.Res.,1975,9:225-235.
[43]Phillips W.F.,A New Continuum Traffic Model Obtained from Kinetic Theory[J].IEEE Transaetions on Automatic Control,1978,AC-23:1032-1036.
[44]Helbing D. Improved fluid-dynamic model for vehicular traffic[J].Physical Review E.1995,51:3164-3169.
[45]Helbing D.,Treiber M.,Gas-kinetic-based traffic model explaining observed hysteretic phase transition[J].Phys.Rev.Lett.,1998,81(14):3042-3045.
[46]Treiber M., Hennecke A.& Helbing D., Derivation,Properties,and Simulation of a Gas-Kinetic-Based,Non-Local Traffic Model[J].Phys.Rev.E,1999,59(1):239-253.
[47]Leonard,D.R.,Gower,P.& Taylor,N.B.,CONTRAM:structure of the model[R].Research report(Transport and Road Research Laboratory(Great Britain)),Traffic Safety Division,1989 .
[48]Daganzo, C.F., The Cell Transmission Model.Part I:A Simple Dynamic Representation of Highway Traffic[J].California Partners for Advanced Transit and Highways(PATH),Institute of Transportation Studies,University of California,Berkeley.1992 .
[49]Daganzo,C.F.,The Cell Transmission Model:A Dynamic Representation of Highway Traffic Consistent with the Hydrodynamic Theory[J].Transportation Research B.,1994,Vol.28(4):269-287.
[50]Yang, Q., A Simulation Laboratory for Evaluation of Dynamic Traffic Management Systems[D].Cambridge:Massachusetts Institute of Technology,1997.
[51]Wilco Burghout,Hybrid microscopic-mesoscopic traffic simulation[D].Sweden:Royal Institute of Technology,2004.
[52]Zhou Liang.,An anisotropic mesoscopic traffic simulation model for dynamic transportation network modeling[D].Texas:University of Texas,2005.
[53]许兆霞,林勇,李树彬,等.中观交通仿真模型dynaCHINA及其案例应用[J].山东科学,2010,23(3):62-65.
[54]李明忠,毕长剑,刘小荷.基于多分辨率的空军作战仿真建模研究[J].指挥控制与仿真,2007,29(5):63-66.
[55]李悦,陆化普.城市快速路交通流特性分析[J].公路工程,2013(6):87-91 .
[56]袁耀明.交通流元胞自动机模型的解析和模拟研究[D],合肥:中国科学技术大学,2009.
[57]Lerner,G.,A.Hochstaedter & R.Kates.,The interplay of multiple scales in traffic flow:coupling of microscopic,mesoscopic and macroscopic simulation[C].World Congress on Intelligent Transportation Systems,Torino.2000.
[58]Magne,L.,S.Rabut & J.F.Gabard,Towards a hybrid macro-micro traffic simulation model[C].INFORMS,Salt Lake City,USA.2000.
[59]Leclercq Ludovic, Hybrid approaches to the solutions of the "Lighthill-Whitham-Richards" model[J].Transportation Research Part B:Methodological,2007,Vol.41(7):701-709.
[60]Jayakrishnan,R.,J.S.Oh & A.B.Sahraoui,Calibration and Path Dynamics Issues in Microscopic simulation For Advanced Traffic Management and Information Systems[J].Transportation Research Record 1771,2001.
[61]Nizard,L.,Combining microscopic and mesoscopic traffic simulators[J].Ecole Polytechnique,Paris,2002.
[62]SHI Huanji,A Hybrid Mesoscopic-Microscopic Traffic Simulation Model:Design,Implementation and Computational Analysis[C].TRB 2006 Annual Meeting CD-ROM,2006.
[63]刘宝宏.多分辨率建模的理论与关键技术研究[D].长沙:国防科学技术大学,2003.
[64]Biddle M.A., Proposed Scheme for Implementing Aggregation and Disaggregation in HLA[C].Proceedings of 2000 Fall Simulation Interoperability Workshop,2000.
[65]Natrajan A.,Nguyen-Tuong A.,To disaggregate or not to disaggregate,that is not the question[J].Department of Computer Science,University of Virginia,1995.
[66]Davis P.K.,Hillestad R.J.,Families of Models that Cross Levels of Resolution:Issues for Design[C].Calibration and Management.Proceedings of 1993 Winter Simulation Conference,1993.
[67]Natrajan A.,Consistency Maintenance in Concurrent Representations[D].Doctoral Dissertation,School of Engineering and Applied Science at the University of Virginia,2000.
[68]刘宝宏,黄柯棣.基于HLA的多分辨率建模框架的设计与实现[J].系统仿真学报,2004,16(7):1481-1485.
[69]Anand Natrajan,Paul F.Reynolds,Concurrent Representations for Jointly-executing Models[R].Technical Report,Department of Computer Science,University of Virginia,2001.
[70]Kornman B. D., Marion P. B., Cross-Model Consistency in JSIMS[R].Technical Report Lockheed Martin Information Systems Advanced Simulation Laboratory.Norfolk,Virginia,1998.
[71]Reynolds Jr.,P F,Natrajan A.& Srinivasan S.,Consistency Maintenance in Multi-Resolution Simulations [J],ACM Transactions on Modeling and Computer Simulation,1997,Vol.7(3):368-392.
[72]Powell D.R.,Control of Entity Interactions in a Hierarchical Variable Resolution Simulation [C].Proceedings of 1997 Fall Simulation Interoperability Workshop,1997.
[73]P K.Davis,R.K.Huber,Variable-Resolution Combat Modeling:Motivations,Issues,and Principles[R].RAND Technical Rep.,N-3400-DARPA,1992 .
[74]Barros,F.J.,Zeigler,B.P.& Fishwick,P A.,Multimodels and Dynamic Structure Models:An Integration of DSDE/DEVS and OOPM[C].Proceedings of the 1998 Winter Simulation Conference,1998.
[75]Davis P. K., Hillestad R. J., Experiments on Multiresolution Modeling[R].RAND Report.MR1004,RAND Corp,1998.
[76]Lee K.,Fishwick P.A.,OOPM/RT:A Multimodeling Methodology for Real-Time Simulation[J].ACM Transactions on Modling and Computer Simulation,1999,Vol.9(2):141-170.
[77]Sekine S.,Kanou M.& Ogata M.,et al,Advanced Technique for MRM(Multi-resolution models)[C].Proceedings of 2001 Spring Simulation Interoperability Workshop,2001.
[78]Schaffer R.,Kukolich S.,Multi-Resolution Modeling Summary and Discussion Paper[R].Lockheed Martin Information Systems Advanced Simulation Center,1998.
[79]Schaffer R.,Marion P.B.,Multi-Resolution Modeling Final Report[R].Advanced Simulation Center,Burlington,1999.
[80]Butler B.,Deign-Strategies for Multi-Resolution Synthetic Environment Representation with Examples from One SAFSNE[C].Proceedings of 2002 Fall Simulation Interoperability Workshop,2002.
[81]Reynolds R.A., Iskenderian H.& Ouzts S.O., Using Multiple Representations and Resolutions to Compose Simulated METOC Environments[R].Proceedings of 2002 Spring Simulation Interoperability Workshop,2002.
[82]Yang,Q.,H.Slavin,High Fidelity,Wide Area Traffic Simulation Model[R].Caliper Corporation,Boston,USA,2002.
[83]黄玮南.交通系统多分辨率仿真研究[D].上海:同济大学,2009.
[84]孙剑,黄玮南.交通系统多分辨率仿真框架研究[DB/EB].中国科技论文在线,2009.
Review of Multi-resolution Traffic Simulation Model
MA Jian1,2, ZHANG Liyan1,2, LI Keping2
(1.Department of Civil Engineering, Suzhou University of Science and Technology, Suzhou, Jiangsu 215011, China;2.School of Transportation Engineering, Key Laboratory of Road and Traffic Engineering, Ministry of Education, Tongji University, Shanghai 200092, China)
In the aspect of theories of multi-resolution traffic simulation model,the paper researches development situations and development trends of the traffic models which include a single resolution macro-model,meso-model and micro-model,hybrid traffic model and multi-resolution traffic model deeply and particularly.Meanwhile,it summarizes the features and application environments of different models.Finally,it points out the main achievements and deficiencies of theories of multi-resolution traffic simulation.The paper offers the direction for further research and it has a high theory value.
traffic simulation; macro-model; meso-model; micro-model; multi-resolution; single resolution; traffic model
2015 — 03 — 24
国家自然科学基金(51178343);苏州科技学院科研基金项目(XKQ201403);住房和城乡建设部科学技术项目(2013-K5-27);江苏省建设系统科技项目(2014ZD86);江苏省高校自然科学基金(12KJB580005)支持。
马健(1979 — ),男,江苏扬州人,工学博士,主要研究领域为交通仿真、交通控制。zmouterspace@gmail.com
U 491
A
1674 — 0610(2016)04 — 0042 — 08
猜你喜欢
学校教育研究(2021年11期)2021-07-22
中国材料进展(2019年10期)2019-12-07
读者(2019年3期)2019-01-28
制造技术与机床(2017年5期)2018-01-19
中国粮食经济(2018年7期)2018-01-01
中国机电工业(2016年5期)2016-12-01
河南电力(2016年5期)2016-02-06
诗选刊(2015年6期)2015-10-26
中国机电工业(2015年5期)2015-02-28
浙江人大(2014年8期)2014-03-20
