
基于内外边缘分离的虹膜定位方法
2016-09-18 02:56吕金花孙建平
电力科学与工程 2016年8期
吕金花,孙建平
(华北电力大学 控制与计算机工程学院,河北保定071003)
基于内外边缘分离的虹膜定位方法
吕金花,孙建平
(华北电力大学 控制与计算机工程学院,河北保定071003)
虹膜定位在身份识别过程中具有举足轻重的地位,定位的好坏直接影响到定位之后的特征提取,进而影响虹膜的识别精度。鉴于虹膜定位经典算法的定位精度不高、时间长等问题,有人提出基于感兴趣区域的定位算法,在该算法的基础上进行改进,采用内外边缘分别定位,即内边界采用区域属性获得最大面积区域即瞳孔区域,再用最小二乘完成内边界的定位;外边界定位时寻找一个感兴趣区域,以减少眼睑、睫毛等的干扰,经仿真得出该算法与基于感兴趣区域的虹膜定位算法相比,定位准确度提高了,而且快速性也有了提高。
虹膜定位;区域属性;最小二乘;感兴趣区域;边缘检测
0 引言
在这个信息化高速发展的时代,信息安全受到越来越高的重视,人们对这方面的要求也越来越高,寻找一种好的识别方法以保证个人身份安全成为当前的一个关键问题。传统的识别方法[1-2]比如密码、用户名、证件等容易丢失或被伪造已经不能满足要求,依靠人体的固有特征属性或行为特征进行身份识别是目前流行的方法,常见的有指纹、虹膜、步态、人脸等,虹膜因其独特的纹理和复杂的结构受到人们广泛的关注,它具有高度的防伪特性,即使是左右眼也会有所差别;不因年龄而变化,稳定性好;位于人眼内部,具有非侵犯性,基于上述特性,虹膜识别成为当下的焦点。
利用虹膜进行身份识别固然是好,但也存在一些问题,众所周知虹膜定位是识别的关键技术,它直接关系到虹膜识别的精度,人眼主要由瞳孔、虹膜、巩膜组成,如何准确定位以获取虹膜的内外边界是人们一直在研究的问题,定位时将内外边界近似等效成圆。目前公认的两种经典的定位算法分别是1993年剑桥大学John Daugman提出的微积分算法[3-4]和1996年Richard Wildes提出的边缘检测和Hough变换相结合的方法[5],之后人们大都是在这两种方法的基础上进行改进,并没有形成统一的方法。鉴于经典算法存在定位准确度不高或快速性差等问题,此处采用一种定位方法,即对内边界利用区域属性的分析方法;对外边界寻找感兴趣区域[6-7],并利用最小二乘拟合完成定位,通过仿真得出该方法在提高精度的同时也加快了识别的速度。
1 传统的虹膜定位算法
虹膜的纹理脉络复杂,近年来在身份识别中得到广泛应用,其剖面结构[1]4如图1所示;人眼的前视图[2]15如图2所示,由图可以看出瞳孔的灰度值小,与周围的虹膜、巩膜差距大,在处理时根据设定的阈值可以将瞳孔和瞳孔之外的部分分开。虹膜定位有两种传统的定位算法,分别为Daugman的微积分算法和Wildes的Hough变换法,之后虽然也出现了多种定位算法,但都是以这两种算法为基础,不断改进,下面将分别介绍这两种定位算法。
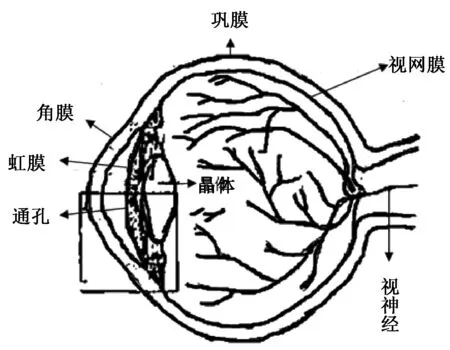
图1 虹膜的剖面结构
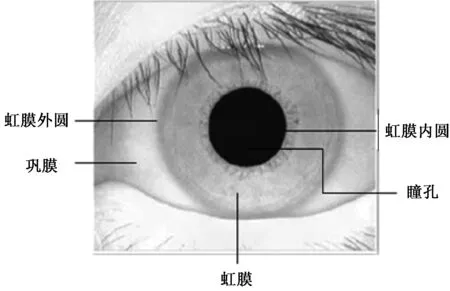
图2 人眼的前视图
1.1Daugman的微积分算法
Daugman提出的微积分算法是对内外边缘采用由粗到精的方法分别估算圆心和半径完成定位,该算法的数学表达式为
(1)
(2)
1.2Wildes的Hough变换法
Wildes的算法分为两步:首先利用基于梯度的边缘检测算子[7]对图像进行边缘检测,得到一个二值图像,然后再利用Hough变换[8]求其圆心和半径,完成定位。
虽然这两种方法一直被视作是虹膜定位的经典算法,但也存在定位精度不高、时间长等问题,针对该情况,决定采用一种基于内外边缘分离的定位算法,即对内外边界采用不同的定位方法。
2 基于内外边界分离的定位算法
2.1内边界定位
内边界定位采用区域属性和最小二乘[9]相结合的方法,具体步骤如下:
(1)根据灰度直方图选择一个合适的阈值,其中图3为原始图像,图4为灰度直方图,阈值T的选择会影响到二值化的效果,如果不加以说明,二值化的默认阈值是127。由于瞳孔区的灰度值小,为了减少睫毛等噪声的干扰,更好地分离出瞳孔区域,由直方图看出阈值选在90左右比较合适,而根据虹膜库统计的情况,阈值选择在[46-110]比较合适,因此选择T=91。
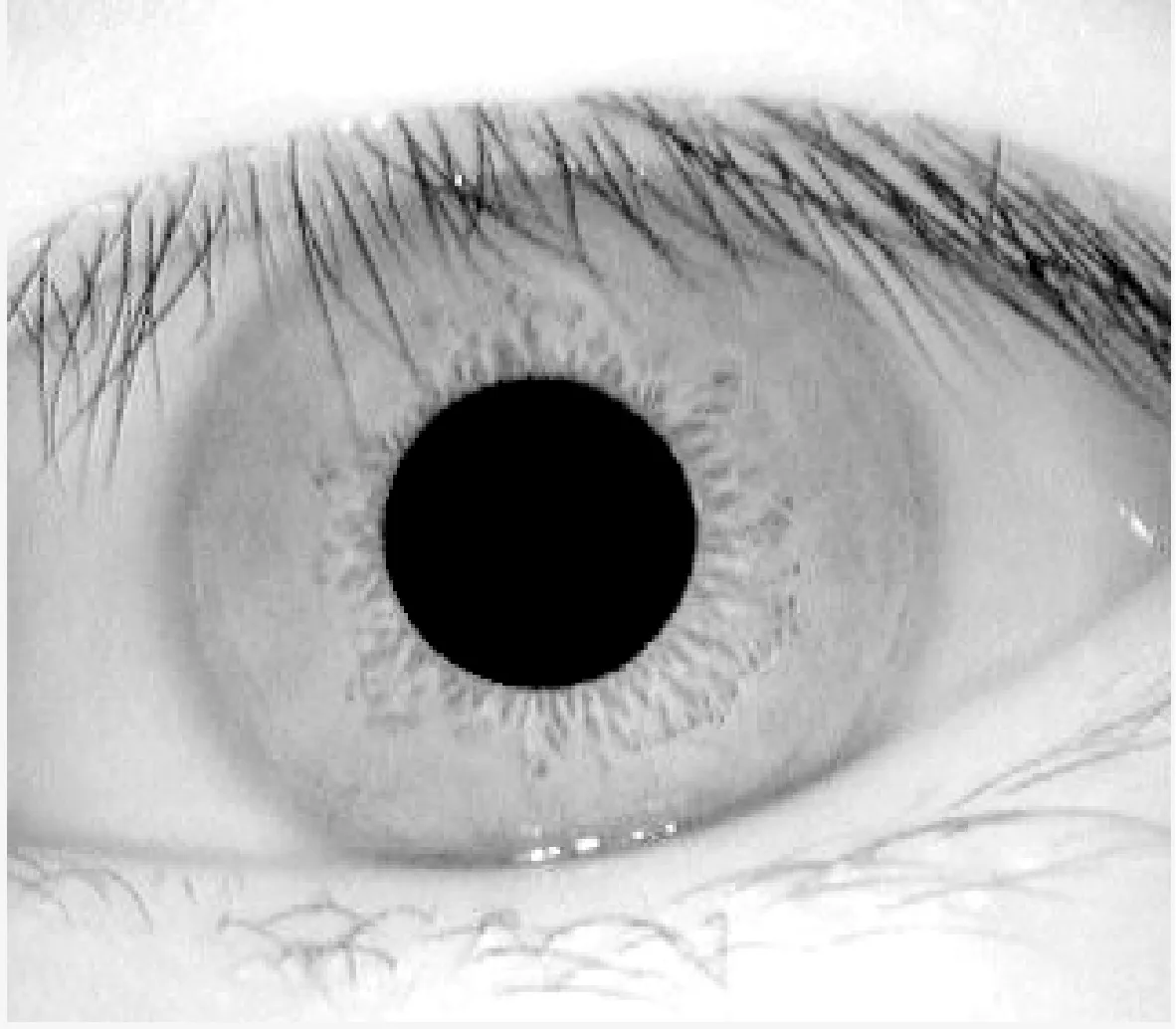
图3 原始图像
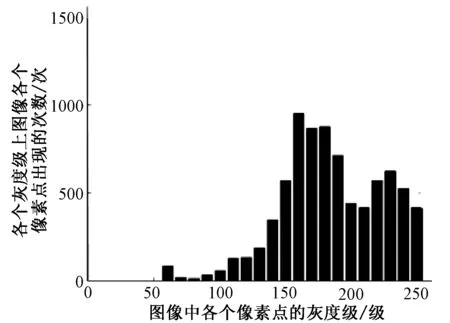
图4 灰度直方图
(2)根据上面选择的阈值进行二值化,为了后面计算方便将原二值图像进行反转,然后求其标签矩阵,即通过对图像的连通体编号,其中正整数代表像素值为1的区域,0代表像素值为0的区域,通过计算不同整数的个数来确定各区域的面积,由原图像知道瞳孔区域的面积最大,因此将小于该区域面积的目标去掉,便获得瞳孔区域,其中图5为反转前的二值图像,图6为反转前确定的瞳孔区域,表1为将图像反转后选取的部分矩阵排列情况。
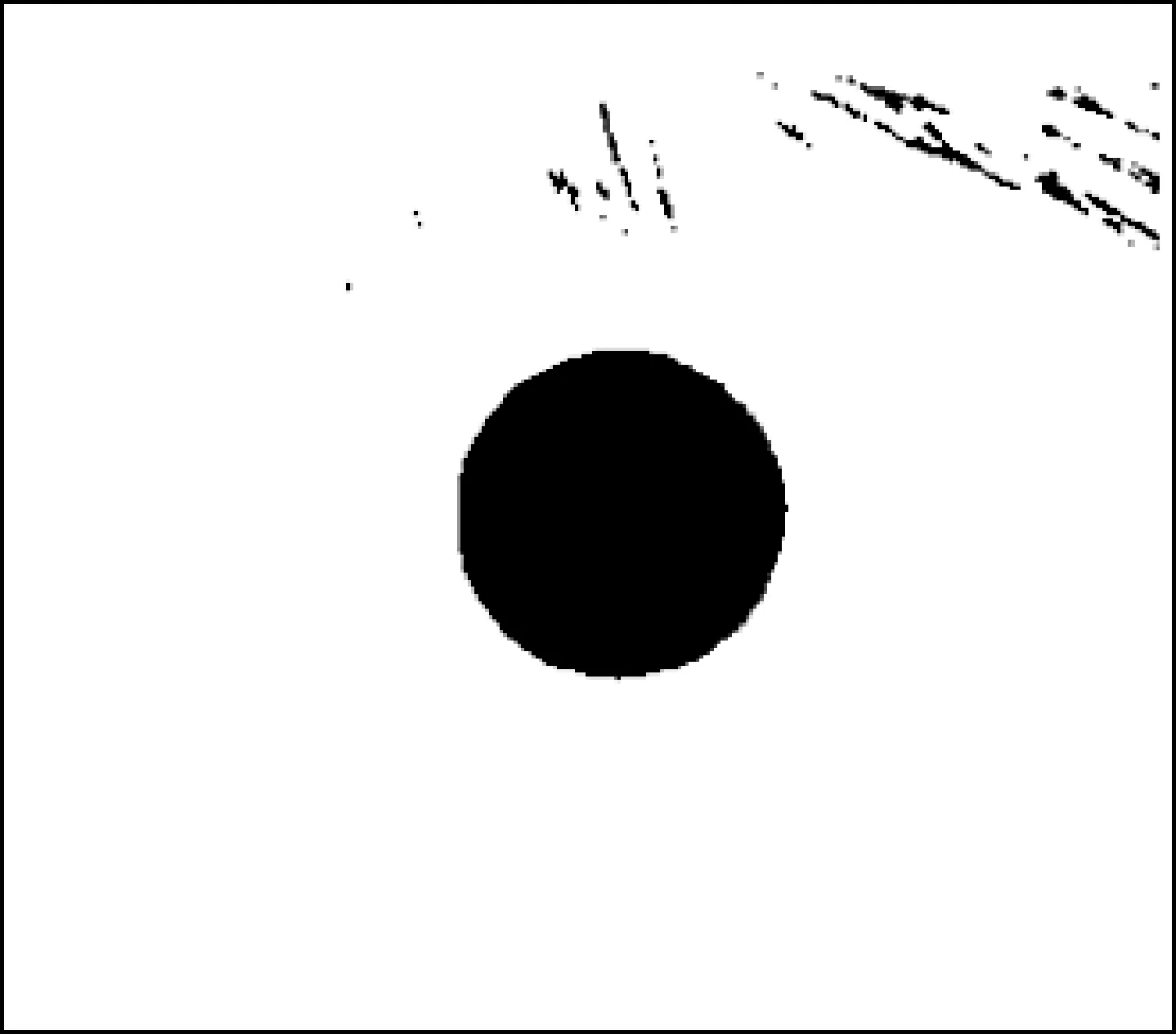
图5 反转前的二值图像
图6 瞳孔区域
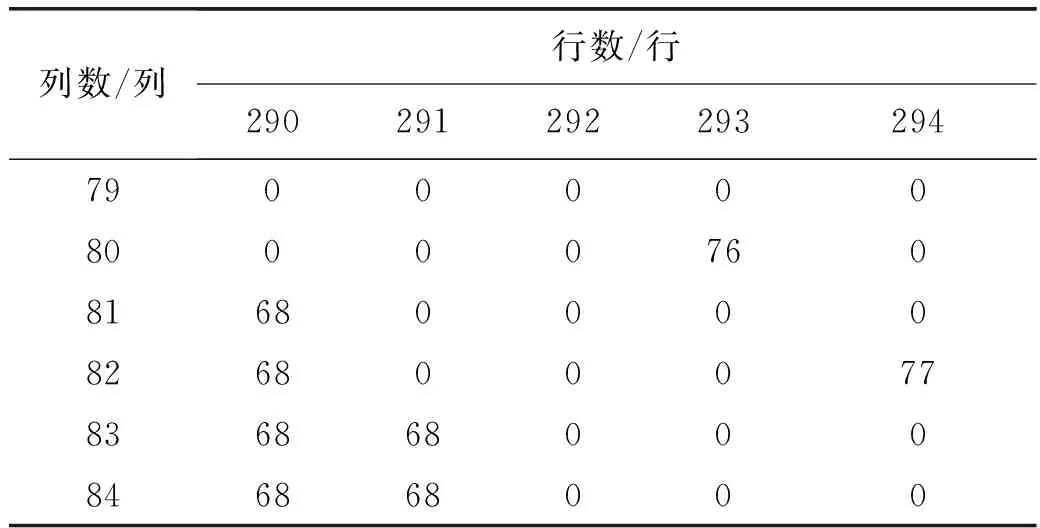
列数/列行数/行29029129229329479000008000076081680000826800077836868000846868000
(3)将得到的瞳孔区域进行边缘检测,在这里采用sobel算子进行检测,检测后只剩下瞳孔区域的边缘线;然后利用最小二乘法求其圆心和半径,从而完成内边界的定位,显示在原图上,结果如图7所示。
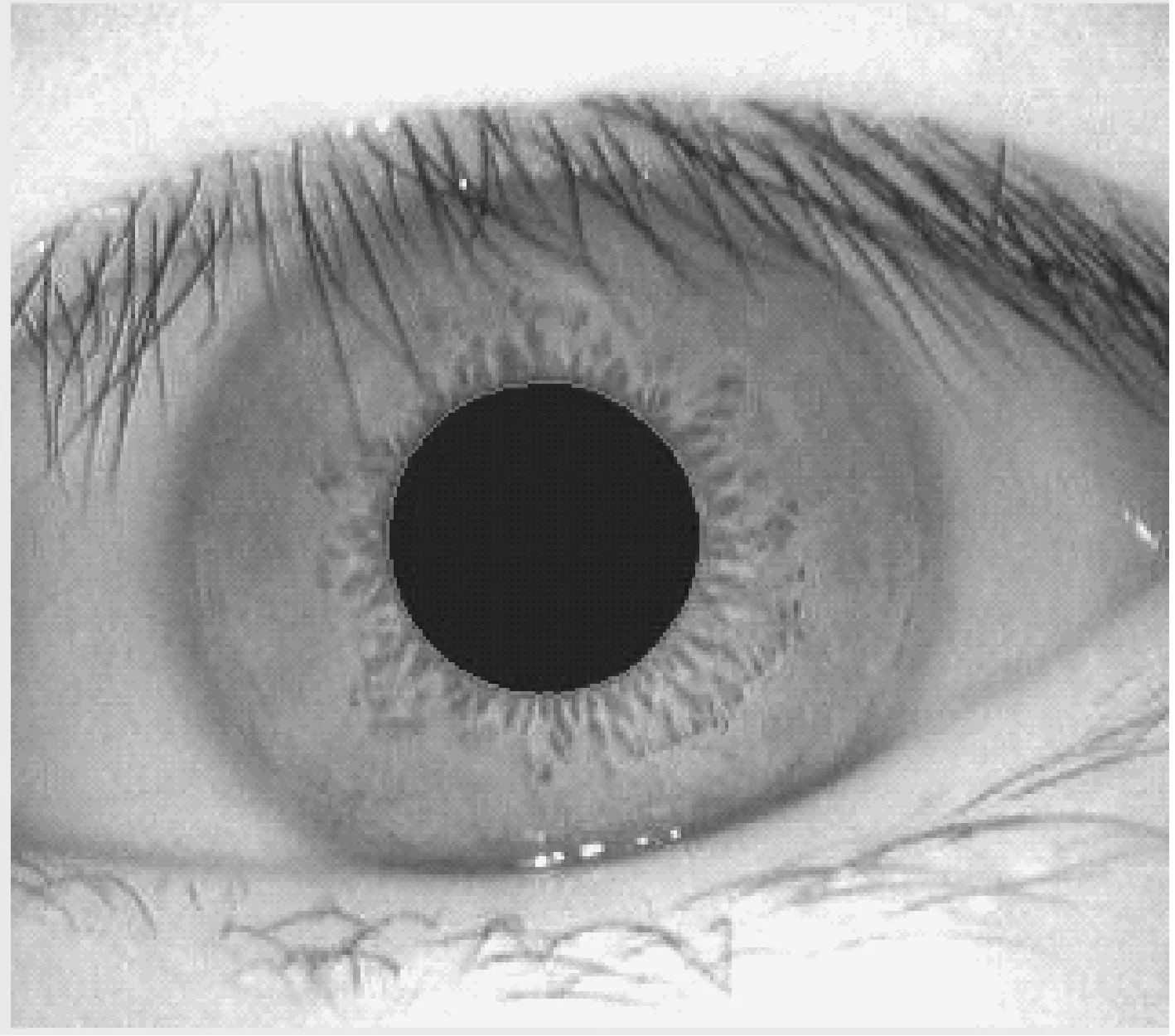
图7 内边界定位结果
2.2外边界定位
考虑到虹膜外边界会受到眼睑和睫毛等干扰的影响,所以选择一个感兴趣区域,通过处理获得其部分边界,进而实现定位。
(1)基于感兴趣区域的虹膜外边界的定位是在内边界完成的基础上实现的,一般情况下,虹膜外边界到瞳孔的距离小于瞳孔半径的3.5倍,前面已经得到瞳孔的圆心(xn,yn)和半径r,因此截取行为[xn,xn+r],列为[yn-3.5r,yn+3.5r]的区域作为感兴趣区域,结果如图8所示,二值化图像如图9所示。

图8 感兴趣区域

图9 二值化图像
(2)去除干扰。利用数学形态学对其进行相关操作,然后进行孔洞填充,得到图10;然后利用canny算子进行边缘检测,其结果和sobel算子边缘检测类似,也是只留下图10中的两段弧形检测线。

图10 去噪后的图像
(3)根据上述得到的部分边界利用最小二乘法进行拟合,得到一个拟合圆,其中圆心为(5.87,139.37),半径为111.29,单位均是单位像素值;将外边界显示在原图像上,结果如图11所示;将内外边界结合,得到最终的虹膜定位结果如图12所示。
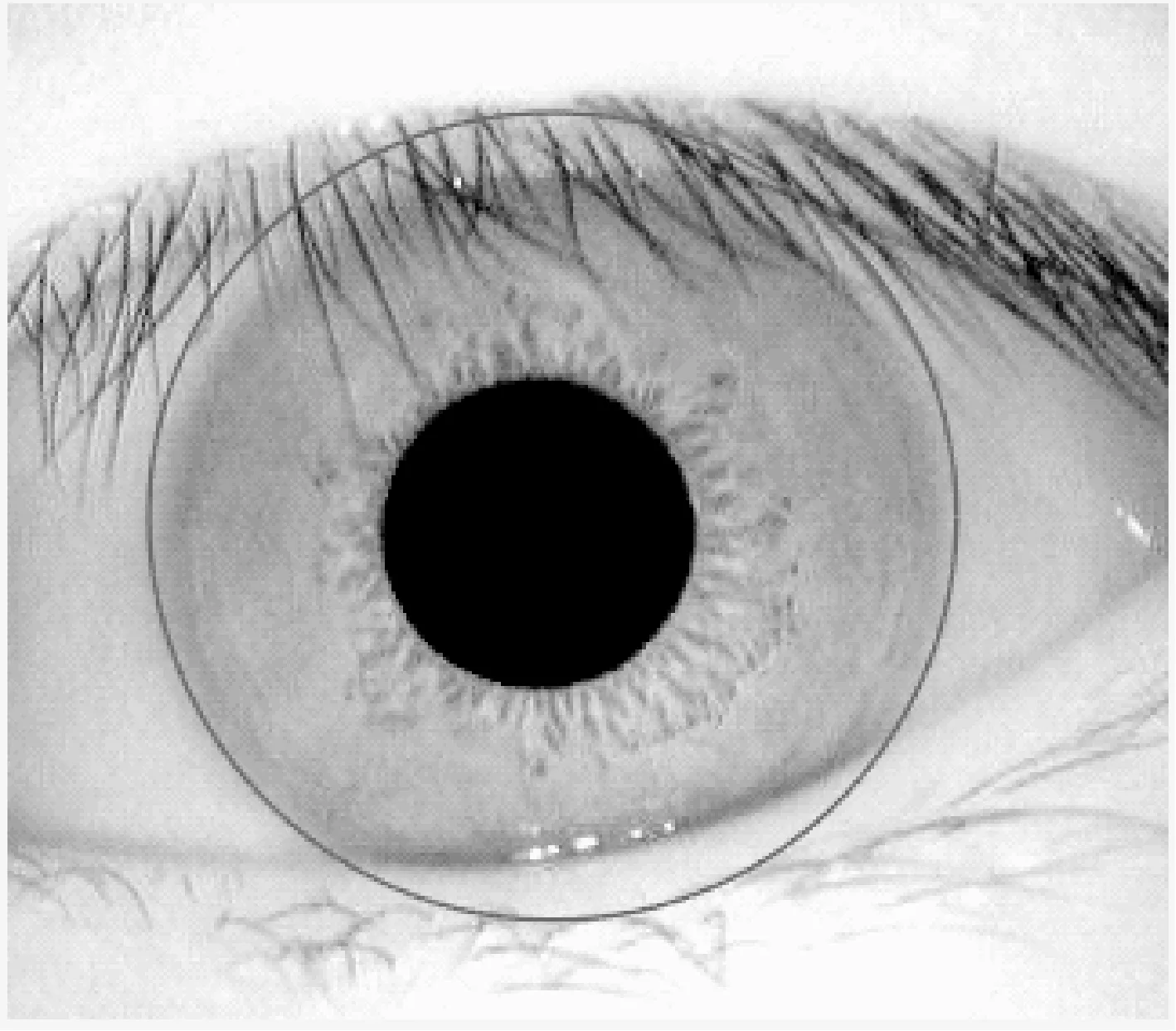
图11 外边界定位结果
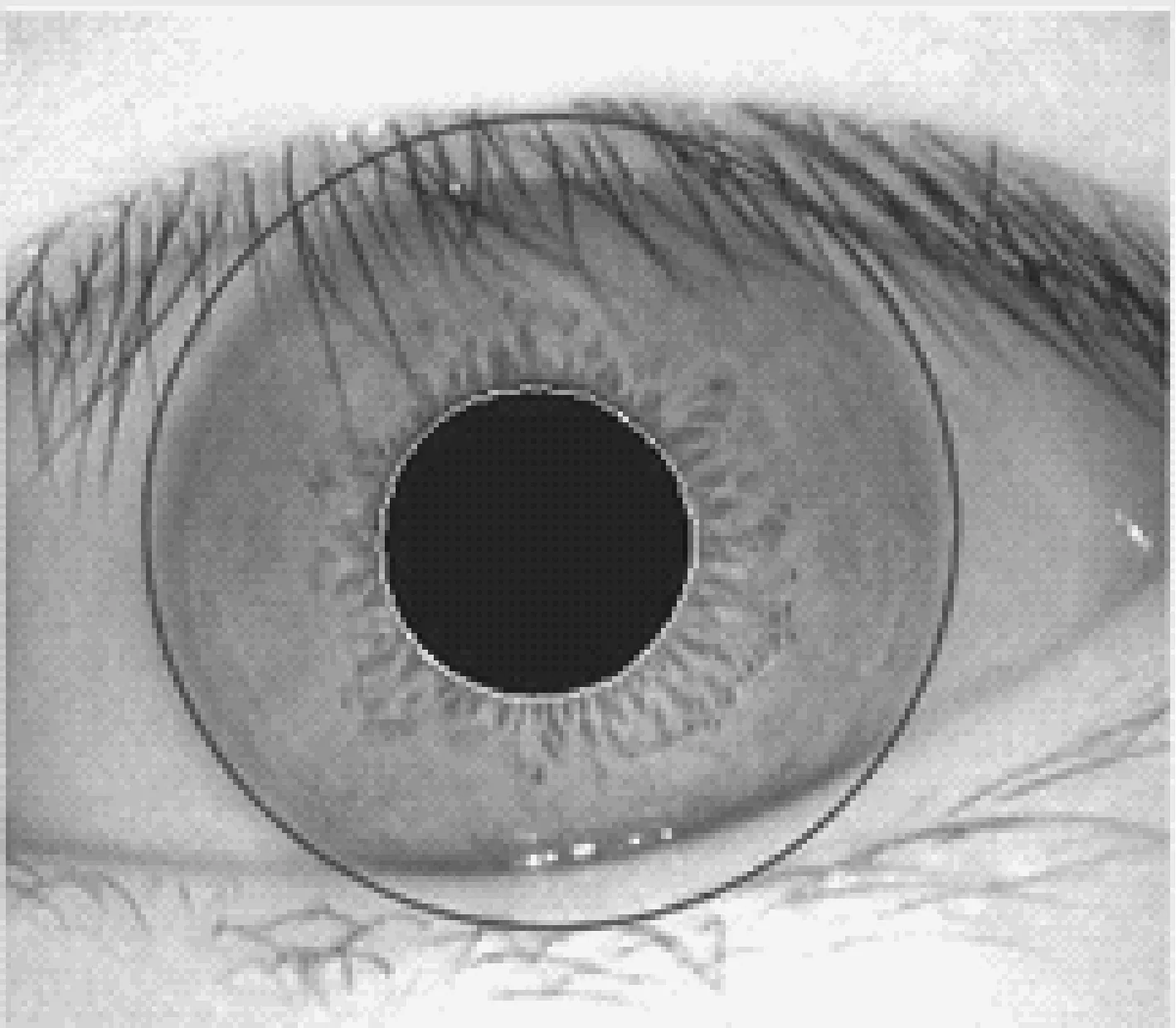
图12 虹膜定位结果
3 实验结果及其分析
所有的编程实现均是在Matlab2015a下进行的,所使用的虹膜图像来自CASIA标准虹膜库[10],分辨率为320×280,表2对虹膜定位的不同算法进行了对比,结果表明该方法具有较高的准确性和较高的快速性。
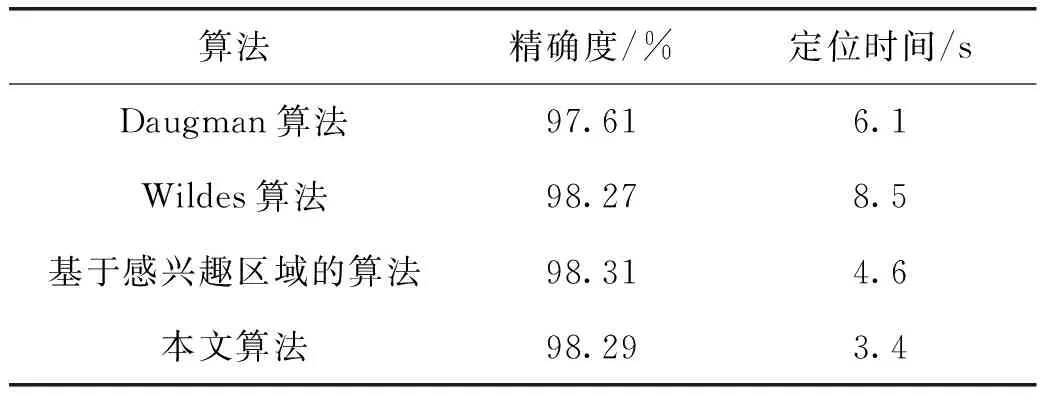
表2 不同算法的定位结果比较
4 结论
针对经典算法的不足,选择采用一种内外边界分离的算法,内边界采用基于区域属性的分析方法,对反转后的二值图像的连通体进行编号,并将小于瞳孔区域面积的部分去掉,可以有效地去除瞳孔内的噪声,有助于提高识别精度;外边界寻找一个感兴趣区域,即选择其中受眼睑、睫毛等干扰较小的区域,然后通过边界拟合完成外边界的定位,与其他几种方法相比,该方法不仅提高了定位精度而且缩短了定位时间,且简单易于实现。
[1]陈英. 虹膜定位和识别算法的研究[D]. 长春:吉林大学,2014:1-8.
[2]刘扬. 基于虹膜身份识别算法的研究[D]. 大庆:东北石油大学,2014:15-19.
[3]DAUGMAN J. High confidence visual recognition of persons by a test of statistical independence[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1993,15(11):1148-1161.
[4]DAUGMAN J.Statistical richness of visual phase information:update on recognizing persons by iris patterns[J].International Journal of Computer Vision,2001,45(1):25-38.
[5]WILDES R P. Iris recognition: an emerging biometric technology[J]. Proceeding of the IEEE, 1997,85(9):1348-1363.
[6]王博凯,杨淑莹,王光彪,等. 基于感兴趣区域的快速虹膜定位方法[J]. 天津理工大学学报,2012,28(S1):24-27.
[7]刘洋,李霞,王娜,等. 基于特定感兴趣区采样的虹膜定位改进算法[J]. 光子学报,2008,37(6):1277-1280.
[8]杨杰. 数字图像处理及MATLAB实现[M]. 北京:电子工业出版社,2010.
[9]李乾. 虹膜图像预处理研究[D]. 哈尔滨:哈尔滨工程大学,2012.
[10]CASIA Iris Image Databases [EB/OL]. http://www.cbsr.ia.ac.cn/IrisDatabase.htm, 2014:2-26.
Iris Location Algorithm Based on Separating the Inner and Outer Edges
LU Jinhua, SUN Jianping
(School of Control and Computer Engineering, North China Electric Power University, Baoding 071003, China)
Iris Location plays a decisive role in the identification process, which has a direct influence on the feature extraction in the process, thereby affecting the accuracy of iris recognition. In consideration of the lower accuracy and more time of the classical algorithm, some researchers posed a method based on the region of interest. This paper makes some improvements based on the new method, by selecting different methods position the inner and outer edges, where the inner edge uses a regional property to obtain the maximum area, also known as pupil area, then completes positioning with the least square circle fitting method. In order to reduce the interference of eyelids and eyelashes, etc., this paper looks for an interesting field. Finally, compared with iris location algorithm based on the region of interest, the method applied in this paper not only improves the accuracy but also reduces the simulating time.
iris localization;area properties;least square circle;interesting filed;edge detection
2016-05-17。
吕金花(1992-),女,硕士研究生,研究方向为自动化模式识别与智能系统,E-mail:1204572694@qq.com。
TM73
A
10.3969/j.issn.1672-0792.2016.08.013
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
中国医学物理学杂志(2021年1期)2021-02-05
含能材料(2021年1期)2021-01-10
汽车实用技术(2019年6期)2019-04-11
青年歌声(2018年2期)2018-10-20
文萃报·周二版(2018年51期)2018-08-04
阅读与作文(初中版)(2017年6期)2017-07-05
学苑教育(2015年16期)2015-08-15
博客天下(2009年12期)2009-08-21
老同志之友(2009年9期)2009-06-29
