
机器人导航中振动检测传感器的设计与改进*
2016-09-14 12:29王宏,王乾,郭崇
沈阳工业大学学报 2016年4期
王 宏, 王 乾, 郭 崇
(1. 重庆工程职业技术学院 机械工程学院, 重庆 402260; 2. 中国矿业大学 机电与信息工程学院, 北京 100083; 3. 沈阳农业大学 信息与电气工程学院, 沈阳 110886)
机器人导航中振动检测传感器的设计与改进*
王宏1,2, 王乾2, 郭崇3
(1. 重庆工程职业技术学院 机械工程学院, 重庆 402260; 2. 中国矿业大学 机电与信息工程学院, 北京 100083; 3. 沈阳农业大学 信息与电气工程学院, 沈阳 110886)
针对采用传统方法进行振动检测传感器数据采集时存在的谐振失真问题,提出基于32通道VXI总线技术和阵列信号处理的机器人导航振动检测传感器改进设计方法,并对系统进行了总体设计和功能模块分析.通过均匀线列阵分布模型对检测到的振动信号进行阵列信号处理和波束形成分析,并结合32通道VXI总线数据采集技术和PXI总线数据回放技术,进行了系统模块化设计和集成.结果表明,改进的振动检测传感器系统具有较好的数据采集和信号处理能力,为机器人导航提供了准确的参量数据和控制信号输入.
机器人; 导航; 传感器; 数据采集; 振动检测; 控制信号; 模块化
随着智能控制和机械工业技术的发展,人工智能得以快速进步.智能机器人作为人工智能的重要产物,逐渐在某些危险和重要环境岗位中取代人类进行相关的生产作业和勘探操作,并在野外勘探、智能遥感控制、极地考察、应急救援及远程探测等领域都起到了重要作用.而其在行走和作业操作过程中,均需通过振动传感器对外界环境数据信息进行采样和分析,再传输到机器人智能神经控制单元,结合设定的智能控制算法实现机器人的导航和控制.因此,机器人导航中的振动传感器是实现机器人模仿人类进行智能行走和作业的基础,研究相关振动检测传感器的优化方法在提高机器人控制稳定性和可靠性方面具有积极重要的意义[1-3].
常用的机器人振动检测传感器优化设计基于触发总线滤波的振动检测传感器方法,通过模拟信号预处理方法进行振动信号的自适应采样和信号分析,提取振动信号的高阶谱特征进行传感器控制.但是该方法模块化兼容性能不好,可靠性不高,容易出现数据采样的失真和误差,对此众多相关文献进行改进研究.文献[4]提出基于声学基阵收发转换控制的机器人振动检测传感器设计方法,系统包括了数据采集功率放大模块、收发转换控制模块和A/D采样模块等,该传感器检测系统动态控制增益较高,性能较好,但是在进行传感器振动信号检测过程中容易产生抖振,振动信号检测准确率低;文献[5]提出基于调谐回路高频增益放大的机器人导航振动传感器检测方法,对ZigBee传感器的原始数据进行采集,提高了传感检测过程的可靠性,但是该方法计算开销较大,实时性不好;文献[6]设计的机器人振动信号检测传感器采用单通道基阵信号采集实时数据的方法,但随着机器人行为空间环境干扰因素的多元化,导致传感器在数据采集中出现谐振失真问题.
针对上述问题,本文提出基于32通道VXI总线技术及阵列信号波束形成处理的机器人导航振动检测传感器改进方法.首先分析了系统的总体设计思想和功能模块,其次针对振动检测传感器的信号处理模块进行振动数据的阵列信号处理,构建波束形成算法,实现对机器人导航控制环境空间信号方位源估计,并以此为软件算法核心进行系统的模块化设计,最后对系统进行了仿真调试,得出有效性结论,展示了改进设计的振动传感器检测系统在数据采集和信号处理的优越性能.
1 传感器总体设计与功能指标
1.1机器人导航振动传感器系统总体设计
为了实现机器人在作业过程中准确导航,采用振动信号检测和传感器阵列信号处理方法,对外界环境参量信息进行采集和估计,为机器人控制系统提供准确的数据信息参考,实现了机器人的信息智能处理和导航控制.本文设计的振动检测传感器采用VXI总线技术进行高精度数据信息采样,而其传感器样机是由一个装配机箱和一块带有插槽位的底板构成,振动传感器的基础模块如图1所示.
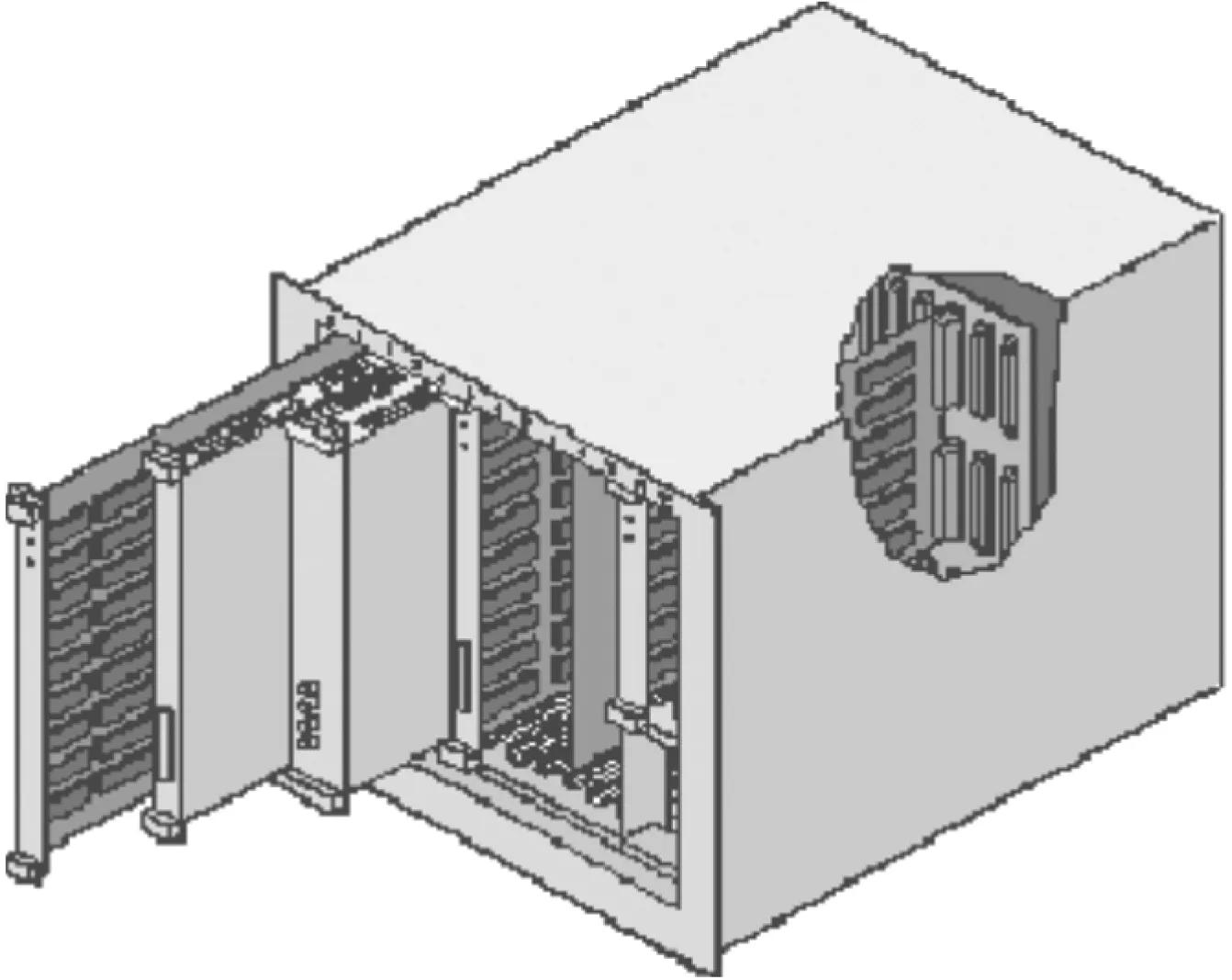
图1 振动传感器基础模块结构Fig.1 Basic module structure of vibration sensor
根据图1所示振动传感器基础模块,采用32通道VXI总线技术进行传感器系统集成化设计,改进的传感器振动信号检测系统具有振动信号测量、机器人导航回波信号模拟、32通道数据记录存储和回放以及传感器阵列信号波束形成分析和信源估计等功能.通过对振动信号的测量,利用多源波束形成方法对机器人作业环境中发射、传输和接收的振动信号进行测量和分析.根据传感器中振动信号转换器的阻抗特性进行发射电压响应匹配,实现对振动信号的回波模拟,估计出机器人的目标强度、距离和速度等参量信息,并对回波模拟信号进行特征提取和空间信源估计,最终通过回放频率体现机器人的导航信息,提高机器人的导航精度[7].
根据上述功能分析得出改进的机器人导航振动检测传感器的总体结构模块,包括振动信号采集基阵模块、数据收发转换模块、AD与DA接口模块、功率放大模块和信号处理模块等,振动检测传感器系统的组成框图如图2所示.

图2 振动检测传感器系统组成框图Fig.2 Composition block diagram of vibration detection sensor system
1.2系统功能分析
振动信号采集基阵由32通道的振动信号换能器并联组成,振动信号换能器是采用压电传感器进行原始信号采样和数据收发,它的功能是电声、声电转换,通过信号采集实现直接通信以及系统同步.当一个信号传输至基阵两端时,采用32通道进行阵列信号采集和实时数据记录,构建振动信号处理基阵.振动检测传感器基阵一般都是收发合置的,本系统同样采用此设计方法.
检测传感器数据采集系统是传感器检测系统的基础,它通过VIX总线控制方法进行信号有效性检测,通过控制PCI总线传递的动态增益码进行模拟信号预处理,并对振动信号进行输出动态增益控制,实现回波模拟.而机器人的振动检测传感器数据采集模块主要包括DSP信号处理器、压控放大器、多路回波信号桥接电路、开关电平逻辑设备、外部I/O设备、宽带阻抗匹配器、外部存储器以及复位电路等8个部分.
2 传感器阵列信号分析和处理
在系统总体设计和数据采集的基础上进行机器人导航阵列传感器信号处理.利用信号和机器人行为空间的特征获得空间处理增益,实现对机器人导航过程中空间参量的估计.使用32通道VXI总线技术进行基阵振动信号采样,结合波束形成和目标方位估计算法进行信号处理分析.建立传感器信号和干扰模型,机器人导航过程的振动信号传感器基阵是由M个阵元组成的均匀线列阵[8-10],振动信号传感器基阵均匀线列阵分布示意图如图3所示.
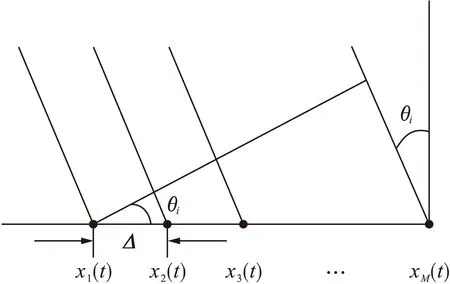
图3 传感器基阵均匀线列阵分布示意图Fig.3 Schematic uniform linear array distribution of sensor array
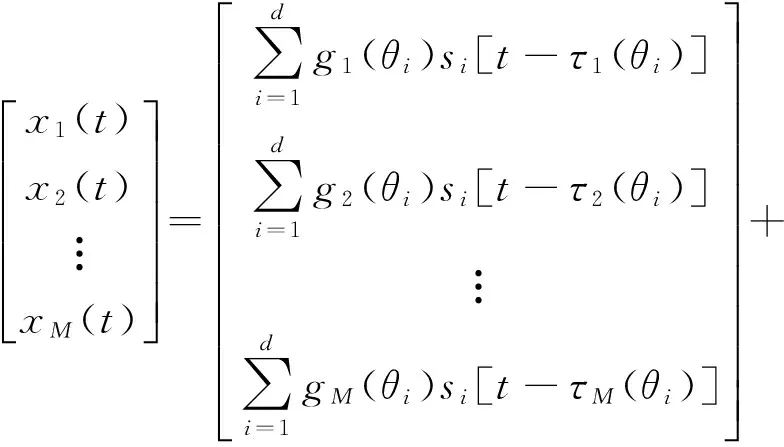
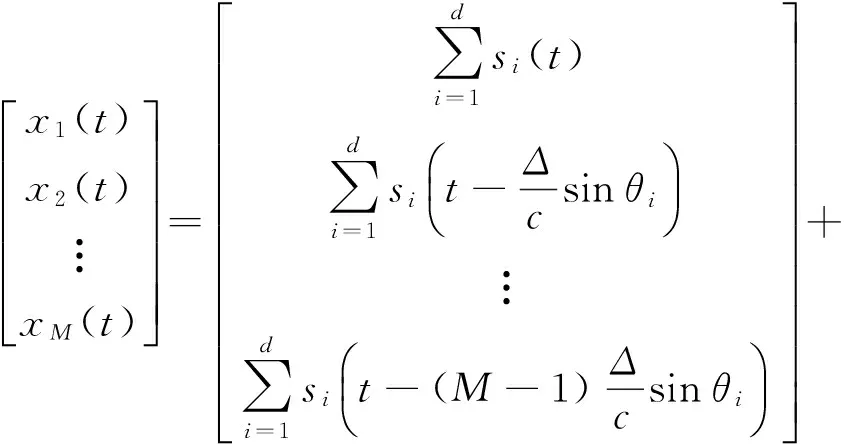
设阵元任意随机分布在空间平面上,相邻阵元间有d个振动辐射源si(t)(i=1,2,…,d),则振动信号传感器基阵的第m个阵元输出可表示为

(m=1,2,…,M)
(1)
式中:θi为第i个无指向性振动信号的入射方向角;gm(θi)为第m个均匀线列阵基阵阵元对第i个信号的检测灵敏度;τm(θi)为第m个阵元通过时域谱估计得到的第i个信号相干波束形成的时间延迟;nm为第m个阵元上的电磁辐射等干扰量.若用矩阵表示则振动信号传感器的阵元输出可以描述为一维矢量,即
(2)
各信号的方向矢量在时频域内相互独立,则式(2)信号模型可以简化为
x(t)=Gs(t)+n(t)
(3)
式中:
x(t)=[x1(t),x2(t),…,xM(t)]T
(4)
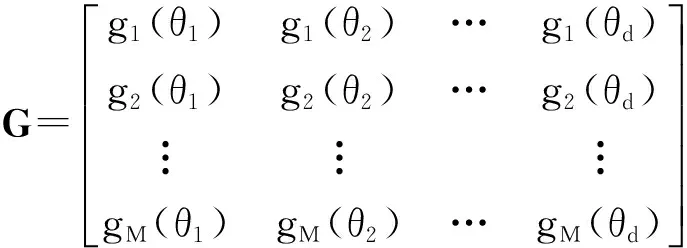
(5)
s(t)=[si(t-τ1(θi)),si(t-τ2(θi)),…,
si(t-τM(θi))]
(6)
根据上述分析得到机器人导航振动数据采集干扰噪声为一个空间平稳随机过程.对信号基阵进行随机信号分析,在图1所示的线列阵中令第1个阵元为参考阵元,得到振动检测传感器第i个信号在第m个阵元上的输出为

(m=1,2,…,M)
(7)
(8)
利用32通道信号进行特征采样,振动传感器的各阵元是无指向性的,采用波束形成方法进行空间增益聚焦,则空间增益聚焦矩阵为
(9)
若噪声子空间均为窄带的,且信号子空间中的特征分解中心频率均为f0,则第i个基阵振动信号采样的输出结果可以表示为
si(t)=ui(t)cos[2πf0t+φi(t)]
(i=1,2,…,d)
(10)
式中,φi(t)和ui(t)分别为信号子空间的相位调制和时频调制.构建慢变函数得到输出复信号模型为

(i=1,2,…,d)
(11)
对复信号进行解析滤波处理,结合均匀线列阵对θi方向相应向量卷积积分,得到输出的噪声为
τm(θi))+φi(t-τm(θi)))]≈
ui(t)exp[j(2πf0t+φi(t))]·
exp(-j2πf0τm(θi))=
(i=1,2,…,d;m=1,2,…,M)
(12)
假设机器人导航中的干扰噪声分布是复高斯分布,对M个振动信号辐射源信息采样基阵进行相位加权,对每个阵元输出的xi(t)分别通过自适应相位加权,加权量为ωi(θ),则可得到波束形成后传感器输出信号的方位估计结果为
ν(t,θ)=ωH(θ)x(t)=xH(t)ω(θ)
(13)
式中:H表示复共轭转置;x(t)和ω(θ)分别表示为
x(t)=[x1(t),x2(t),…,xM(t)]T
ω(θ)=[ω1(θ),ω2(θ),…,ωM(θ)]T
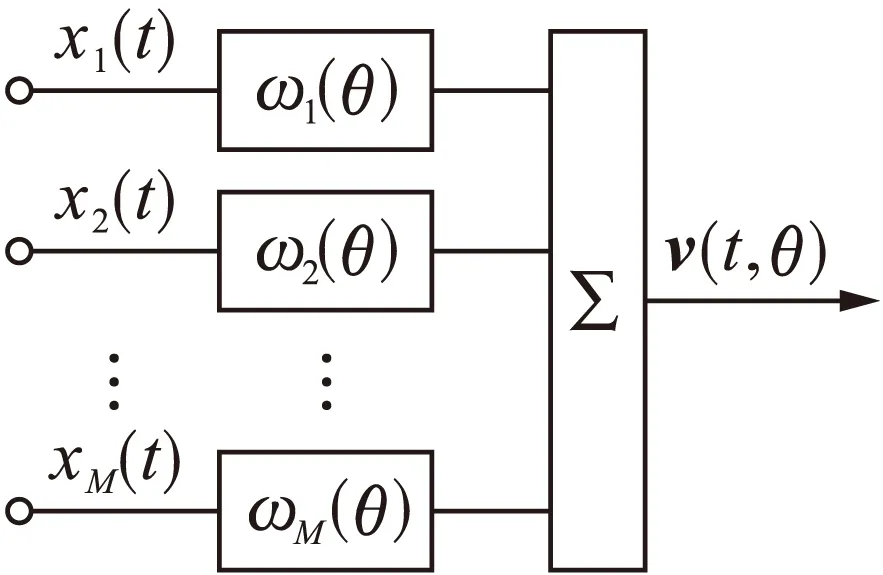
图4 波束形成器的设计结构Fig.4 Design structure for beam shaper
3 传感器数据采集及信息处理
根据上述算法处理结果作为软件核心进行传感器系统模块化设计.由D/A转换器输出两级程控增益信息,通过DSP信号处理器进行振动信号的采集和上位机通信,通过硬件控制实现振动数据的检测和通信,系统模块化设计的要点描述如下:
1) 应用程序加载.初始化成功后,创建采集通道组,把存储在FLASH中的阵列信号处理程序加载到内部RAM中运行,实现波束形成和探测回波识别;
2) 通过PCI桥接芯片创建传输单元,实时记录采集信号,并实现人机对话;
3) 使用VPP仪器驱动程序采样振动信号的幅值,对模拟信号进行动态增益控制编码,初始化VXIplug&play库,使得模拟信号预处理机输出信号满足功能指标;
4) 设置合理的信号源通道和采样频率,进行数模AD转换和DA数据采样,通过调用hpe1432_getGroupInfo()函数控制A/D转换器进行正常采样;
5) 设置一个通道的触发向量,读取A/D采样值,对机器人导航中的振动检测数据进行阵列信号分析和处理;
6) 与外部SRAM通信,设置触发低电平值,实现数据存储;
7) 利用32通道VXI总线技术将采集到的数据传输到机器人导航控制系统,实现机器人控制.
收发转换电路通过仪器会话设置HP E1433A的输入通道,把振动检测传感器检测到的信息加载到接收端.根据具体的测试需求,读取采集数据到主控机,通过模拟信号预处理机实现功率放大,当基阵发射电脉冲检测到触发信号后,设置数据流参数,循环读取HP E1562E中的振动数据,方便机器人导航控制系统监控采集.综上分析,得到本文设计的机器人导航中振动检测传感器数据采集和信号处理流程如图5所示.
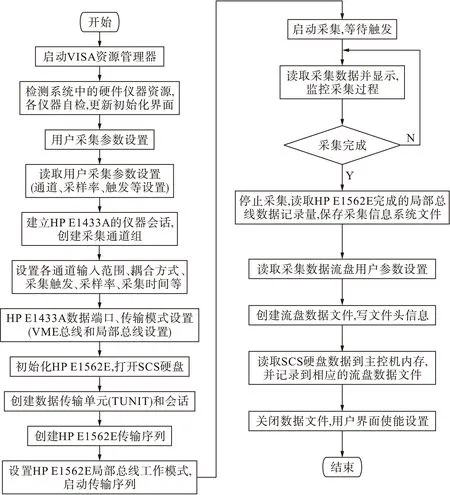
图5 数据采集和信号处理流程Fig.5 Flow chart of data acquisition and signal processing
4 系统调试与仿真实验分析
为了测试本文设计的振动传感器检测系统在实现机器人导航优化控制中的优越性能,进行了仿真实验分析.首先进行振动原始数据信息的采集,使用32通道任意波形发生器作信号源,采用VXI总线进行数据采样,其中采样时间间隔为1.3 s,采样频率为1 024 Hz,信号源产生θi/c的脉冲,设置0°、15°、-15°的3个相干源目标.使用HP E1433A的各种触发模式,外部数字触发由HP E1433A前面板的“ExTrig”端引入.通过PXI总线数据回放技术进行传感器采集数据的回放,记录下振动传感器数据采集的采样率、采集时间和采集通道信息,得到机器人导航振动检测传感器数据采集输出结果如图6所示.
由图6可见,采用本文设计的机器人导航控制传感器能实现多通道的振动数据采样和数据回放输出功能,为机器人导航提供准确的原始参考数据信息.结合本文设计的阵列信号处理算法,对采集到的原始数据进行波束形成处理,得到不同方向的5个归一化波束如图7所示.由图7可见,波束会随着阵元间距的增加向正方向变化,反之向负方向变化.同时还可看出,传感器的阵元可以进行实时修正和个数的选择,通过系统可以设置自适应信号处理的加权方式和阵元间隔,并根据机器人导航的需求设定波束的主轴方向,由此为机器人导航提供准确的目标方位源信息和特征参量.测试结果证明改进系统具有较好的稳定性和可靠性.为了进一步验证振动检测传感器性能,在时间一定的情况下,与传统振动检测传感器进行对比,结果如图8所示.

图6 数据采集输出结果Fig.6 Output results of data acquisition
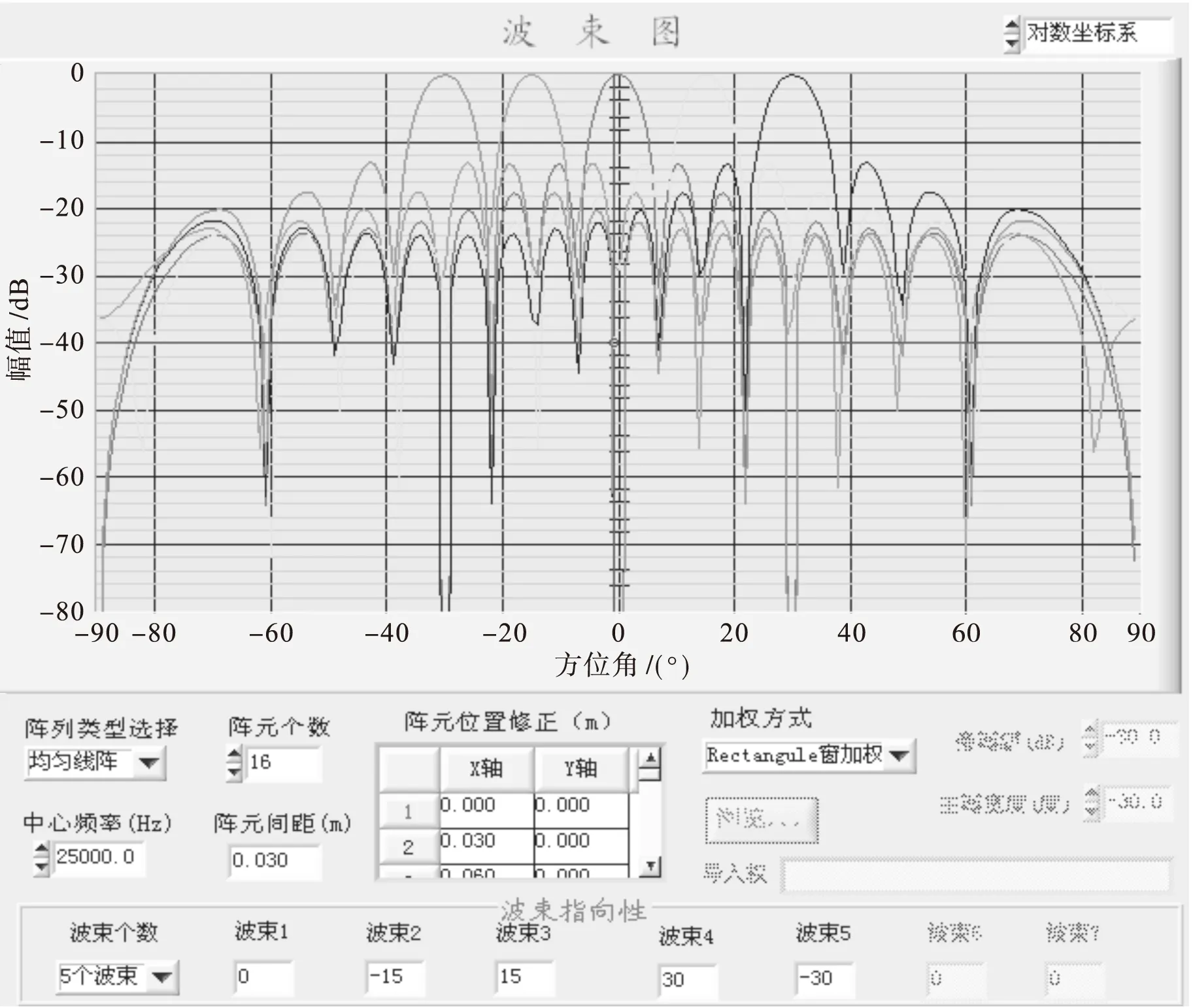
图7 振动检测传感器阵列信号波束Fig.7 Array signal beam of vibration detection sensor
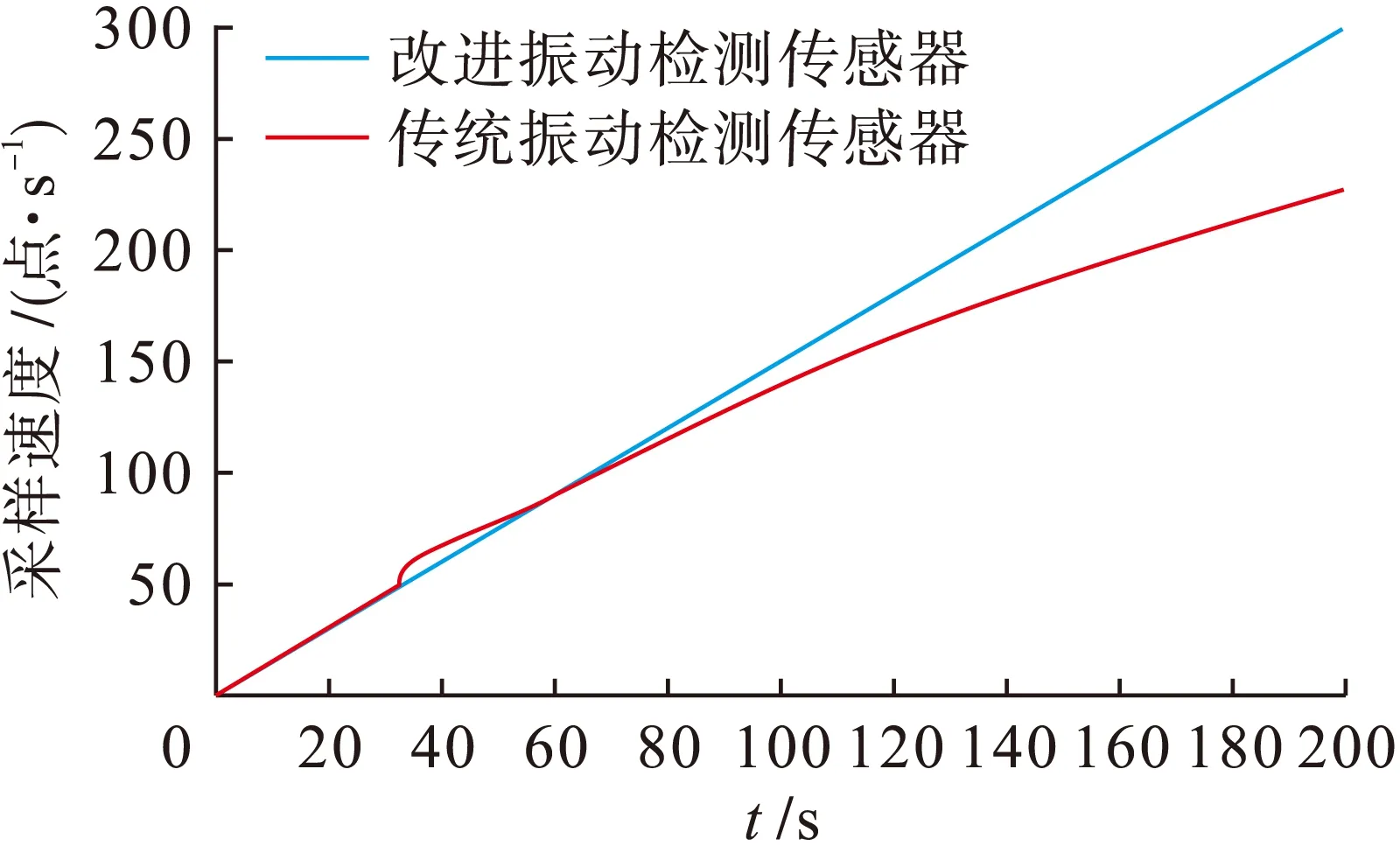
图8 振动检测传感器采样速度对比结果Fig.8 Comparison in sampling speed of vibration detection sensor
由图8可知,在时间一定的情况下,采用本文设计振动检测传感器在0~200 s时间段内采样速度均在上升状态;而传统振动检测传感器在20~60 s内采样速度超过了本文设计的振动检测传感器,但60 s后其采样速度开始降低,且到200 s时其采样速度都一直低于本文设计的振动检测传感器,表明本文设计的振动检测传感器具有较好采样速度.
5 结 语
本文提出基于32通道VXI总线技术及阵列信号波束的机器人导航振动检测传感器改进设计方法,分析系统的总体设计和功能模块,针对振动检测传感器的信号处理模块进行振动数据的阵列信号处理,构建波束形成算法实现对机器人导航控制环境的空间信号方位源估计,并进行了系统的调试仿真.研究表明,本文设计的传感器系统具有较好的数据采集和信号处理能力,性能优越,稳定可靠.
[1]张毅,周丙寅.井下直线电机泵故障检测仪硬件系统设计[J].计算机与数字工程,2012,40(11):162-166.
(ZHANG Yi,ZHOU Bing-yan.Hardware design of underwater motor pump faults diagnose detector[J].Computer and Digital Engineering,2012,40(11):162-166.)
[2]葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
(GE Li-zhi.Visual simulation of UUV attack model based on whole trajectory control analysis[J].Ship Electronic Engineering,2015,35(3):137-141.)
[3]张毅,张磊,罗元.自平衡控制系统稳定性分析与验证[J].重庆邮电大学学报(自然科学版),2014,26(4):501-506.
(ZHANG Yi,ZHANG Lei,LUO Yuan.Stability ana-lysis and verification of self-balancing control system[J].Journal of Chongqing University of Posts and Telecommunications(Natural Science Edition),2014,26(4):501-506.)
[4]Liu M,Xiong J.On α-and D-negative imaginary systems[J].International Journal of Control,2015,88(3):1-15.
[5]Hurtado Q,Rodrigo H,Griggs W M,et al.On interconnected systems,passivity and some generalisations[J].International Journal of Control,2013,86(12):74-89.
[6]邹胜宇,刘振,高海波,等.基于干扰力时间积分的悬吊漂浮物随动控制方法[J].机器人,2015,37(1):1-8.
(ZOU Sheng-yu,LIU Zhen,GAO Hai-bo,et al.Tracking control method for suspended floater based on time integral of disturbance force[J].Robot,2015,37(1):1-8.)
[7]孟健,李贻斌,李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人,2015,37(1):74-84.
(MENG Jian,LI Yi-bin,LI Bin.Control method and its implementation of quadruped robot in omni-directional trotting gait[J].Robot,2015,37(1):74-84.)
[8]贾松敏,白聪轩,王丽佳,等.多特征分块匹配的移动机器人目标跟踪[J].电子设计工程,2015,32(1):22-25.
(JIA Song-min,BAI Cong-xuan,WANG Li-jia,et al.Multi features fragment-based human tracking for mobile robot[J].Electronic Design Engineering,2015,32(1):22-25.)
[9]毛臣健.基于多传感器信息融合的机器人自定位方法[J].科技通报,2012,28(2):146-148.
(MAO Chen-jian.The robot self-localization method based on multi-sensors information fusion[J].Bulletin of Science and Technology,2012,28(2):146-148.)
[10]陈娟,徐力生,徐蒙,等.大坝廊道无线传感器网络节点铺设方法[J].沈阳工业大学学报,2015,37(1):109-115.
(CHEN Juan,XU Li-sheng,XU Meng,et al.Node placement method for wireless sensor network in dam corridor[J].Journal of Shenyang University of Technology,2015,37(1):109-115.)
(责任编辑:景勇英文审校:尹淑英)
Design and improvement of vibration detection sensor in robot navigation
WANG Hong1, 2, WANG Qian2, GUO Chong3
(1. School of Mechanical Engineering, Chongqing Vocational Institute of Engineering, Chongqing 402260, China; 2. School of Mechanical Electronic & Information Engineering, China University of Mining and Technology, Beijing 100083, China; 3. College of Information and Electrical Engineering, Shenyang Agricultural University, Shenyang 110886, China)
In order to solve the harmonic distortion problem in the data acquisition process of vibration detection sensor with the traditional method, an improved design method for the robot navigation vibration detection sensor was proposed based on the VXI bus technology with 32 channels and array signal processing. In addition, the overall design and function module analysis of system were carried out. The array signal processing and beam forming analysis for the detected vibration signals were performed with the uniform linear array distribution model. In combination with the VXI bus data acquisition technology with 32 channels and PXI bus data playback technology, the modularization design and integration of system were conducted. The results show that the improved vibration detection sensor system has better abilities in data acquisition and signal processing, and can provide the accurate parameter data and control signal input for the robot navigation.
robot; navigation; sensor; data acquisition; vibration detection; control signal; modularization
2016-03-10.
国家985跨学科创新平台资助项目(0705-1); 辽宁省教育厅一般课题资助项目(W2013100); 辽宁省自然科学基金资助项目(201202191).
王宏(1964-),男,甘肃临洮人,副教授,博士,主要从事机器人及其传感器技术应用等方面的研究.
机械工程
10.7688/j.issn.1000-1646.2016.04.08
TN 911
A
1000-1646(2016)04-0403-07
*本文已于2016-06-28 14∶32在中国知网优先数字出版. 网络出版地址: http:∥www.cnki.net/kcms/detail/21.1189.T.20160628.1432.004.html
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
水下无人系统学报(2018年5期)2018-11-09
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
弹道学报(2016年4期)2016-12-14
西北工业大学学报(2015年3期)2015-12-14
