基于小型四旋翼无人机的道路交通巡检系统
2016-09-13 07:25翁松伟赖斯聪陈海雄李嘉俊
电子设计工程 2016年3期
翁松伟,赖斯聪,陈海雄,李嘉俊,朱 诚
(深圳大学 城市轨道交通学院,广东 深圳 518060)
基于小型四旋翼无人机的道路交通巡检系统
翁松伟,赖斯聪,陈海雄,李嘉俊,朱 诚
(深圳大学 城市轨道交通学院,广东 深圳518060)
针对道路交通巡检的应用需求,解决常规巡检手段低效、成本高、灵活性差等问题,结合四旋翼无人机的特点,提出以小型四旋翼无人机为载体,搭载成像设备应对突发道路状况执行智能化、快速、灵活、高效的道路监控、巡检作业,提高道路安全水平。本系统通过远距离无线实时影像数据回传,在地面终端进行影像数据处理,得出多种道路交通信息;为交通管理部门、市民提供实时可靠的路面信息;在道路交通拥堵研判、交通事故先期处置等方面作用明显。
交通巡检;道路安全;四旋翼;无人机;图像处理;交通诱导
随着经济社会的快速发展,我国各大城市车辆保有量大幅上升,交通拥堵、交通事故频发已经成为影响城市公共安全的首要因素。然而,在很多城市,固定式交通检测设备虽然大量布设在快速路、主干路上,但存在下列缺陷:1)监控摄像头存在着监控盲区;2)现代道路交通监控系统需采用多屏幕显示,无法有效将同一路段的全方位监控影像集成在同一画面;3)现今国内道路交通监控系统缺乏智能判定交通状况的功能,需人工监视交通画面采集道路交通信息。由此造成部分重要路段的交通信息缺失。导致城市突发事件的信息采集存在着时间、空间、规模等方面的诸多不确定性[1],难以有效灵活地进行道路监控及交通诱导,让交通管理部门无法有效地针对事故实现快速应急处理。
为获取更为全面的交通信息,提升交通管理部门对交通拥堵研判、交通事故先期处置的能力,设计基于四旋翼无人机平台的道路巡检系统。该系统充分利用了无人机快速响应、空中机动灵活不受道路交通拥堵影响的优势。
1 系统总体设计方案
1.1系统功能目标
1)系统利用了无人机快速响应、空中机动灵活不受道路交通拥堵影响的优势,以无人机为载体,搭载成像设备、云台及影像传输模块实现基于机器视觉的道路交通快速检测功能。
①为交通管理部门及时提供巡航路段或交通事故现场实时道路交通图像,为交通疏导提供重要交通信息,保障交通安全;
②无人机可在事故道路入口处充当“空中电子交警”,疏导车辆分流,缓解事故道路通行压力。
2)系统核心的图像处理终端接收无人机回传的监控影像,采用T.Abramczuk检测法获取道路交通参数,结合格林希尔兹的速度—密度线性模型实现道路服务水平评级,建立了完整的道路交通自主智能判定的体系,方便交通部门评估道路交通状况及完善道路历史数据库。
3)系统的信息发布子系统运用GSM蜂窝系统将检测评价所得的交通诱导信息及时以短信发送与微博更新的模式进行反馈,协助交警部门开展交通诱导。
1.2系统体系结构与流程
基于四旋翼无人机平台的道路巡检系统由3大子系统组成:四旋翼飞行控制子系统,道路监控检测子系统,道路信息发布子系统。
1)飞行控制子系统由无人机主体、图像采集传输模块组成,实现巡检作业及快速反应模式,并实时传输图像到道路监控检测终端;
2)道路监控检测终端实时显示现场图像,并且在交通巡检模式中处理图像得到道路交通参数以实现道路评级,整合出交通诱导信息发送至信息发布子系统,再将道路信息存入历史数据库;
3)信息发布子系统及时根据相应路段的实际情况发送信息到相关部门及更新到微博平台,实现交通诱导。
通过3大子系统的有机结合,如图1所示,构成一个完整的巡检系统。

图1 交通巡检系统工作流程图Fig.1 The work flow chart of traffic patrol system
1.3工作模式的设计
为辅助现有道路交通监控系统,多模式、多路段、多方位、多层次地实现道路交通实时监测,定量地、科学地自主判定道路交通状况以实现交通诱导,进一步保障城市道路安全,本系统设计两种工作模式以满足交通信息采集的需求,具体工作模式如图2所示。
1)交通巡检模式
交通巡检模式下,地面终端发送指令,四旋翼无人机按照指定的巡航路线监控道路交通,将采集的影像传输到PC地面终端并进行处理,得出道路参数、道路服务水平评级,整合出交通诱导信息,将交通诱导信息及时反馈,达到提高道路安全水平、车流量诱导等效果。

图2 工作模式流程图Fig.2 The working mode of flow chart
2)险情应急模式
险情应急模式下,地面终端发送指令,无人机快速前往事故路段,定点监控事故现场,图像实时回传功能让现场情况一览无遗,准确记录事故现场的环境、车辆的相对位置、车辆和道路设施损失情况。将事故路段险情信息发送到交通部门、广播电台、微博平台。同时,可在事故道路入口执行“空中电子交警”任务,通过机载交通信号灯、警报器,现场发出道路指示信息,协助交通部门对事故路段车辆进行安全引导。“空中电子交警”是指搭载着LED显示器、警报器的无人机在空中充当“交警”,在事故路段入口处,显示交通信号灯,发出警报声,提醒入口处车辆缓慢前进或绕道行驶,避免事故路段过分拥堵,保障救援工作有序进行。
2 子系统的开发
道路监控检测子系统,是整个道路巡检系统的核心部分,基于机器视觉的道路交通监测系统,具备道路状况实时监控及录制、道路参数的监测、道路服务水平评级等功能[2],其中,道路参数监测及道路服务水平评级是程序的主要功能。道路参数监控得到的主要参数有:平均速度(V),车流量(Q);水平评级系统等级分为:畅行,一般,拥堵,堵塞。无人机具有较强的灵活性,道路巡检系统既可以检测车辆的运行状态和行人、自行车行为等微观交通信息,也可以采集交通流量、平均速度与交通设施分布等宏观交通信息[3]。
1)实时监控功能
监控系统是地面终端的组成部分,集调用摄像头实时监控,截图,录像等功能于一体,实时监控是其主要功能,主要用于对道路状况进行实时监控;当道路发生险情时,无人机快速抵达现场,对现场险情进行事故先期处理,并可启用“空中电子交警”功能,疏导事发路段的车辆。
当巡检系统的工作环境比较恶劣(如大雾,光线条件较差)时,可以利用图像增强增加影像的可视性。系统采用了直方图均衡化[4]的方法来进行图像增强,通过使用累积函数对灰度值进行调整,对图像进行非线性拉伸,重新分配图像像素值,使一定灰度范围内的像素数量大致相同,增强了图像的局部对比度,实现了单通道图像增强[5]。
2)道路交通状况的检测
道路交通状况的检测是四旋翼无人机监控系统的核心部分,兼具获取道路信息及对信息进行分析处理的功能。道路检测的交通参数主要包括:车流量,平均速度。在获取道路信息并对道路信息进行处理之后,还可根据需要,对不同时段的不同道路信息进行分析与记录,并存入到数据库,建立道路网络的历史行车信息数据库。
系统的道路检测方法借鉴了T.Abramczuk检测法[6],该方法已应用于瑞典皇家技术院开发的道路交通监视控制系统。T.Abramczuk检测法在检测线上应用图像帧差方法来检测车辆,每个车道上设置平行于道路的一条检测线,每条检测线为3个像素宽,利用车辆通过检测线时灰度值的变化来得到车辆计数。并根据车辆通过检测线的时间及检测线之间的距离来求解车辆速度。由于检测线可以灵活设置,可以将检测线针对背景进行灰度值获取,得到背景的灰度值,还可以利用平均值或直方图法进行前景检测。
3)道路服务水平评级
道路服务水平评级系统主要是对道路的堵塞程度进行分级判断,借鉴格林希尔茨的速度—密度线性关系模型[7],图像处理终端在获取道路交通信息后评估所得到的道路服务水平等级,作为最终结果反馈给交通部门及大众进行交通诱导。
道路服务水平等级由道路交通参数和道路本身的通行能力决定的。道路交通参数主要由道路交通量及道路交通平均速度所决定的;道路可能通行能力主要是由城市的人口、城市规模、道路等级、车道数及车道宽所决定的。以道路上的运行速度和交通量与可能通行能力之比综合反映将得到道路服务水平等级[8],并且将此道路服务水平等级信息反馈给信息发布子系统。
交通流三参数之间的基本关系式为:Q=KV
式中Q—平均流量(辆/h);V—速度(区间平均速度)(km/h);K—平均车流密度(辆/km)。
借鉴格林希尔茨的速度—流量关系模型,模型标示出速度与交通流量存在的关系。
在图像处理终端已获取相应路段道路交通信息(道路上的运行速度V和交通量Q)的基础上,结合极大流量Qm以及畅行速度Vf,将Q对比Qm;将V对比Vf;优先判定是否符合一级与四级的范围,再判定是否符合二级与三级的范围,将得到道路服务水平等级。
3 系统运行的验证
3.1图像处理终端程序测试过程
1)实验算法
车辆计数:T.Abramczuk检测法在检测线上应用图像帧差方法来检测车辆,每个车道上设置平行于道路的一条检测线,每条检测线为3个像素宽,利用车辆通过检测线时灰度值的变化来得到车辆数。
速度检测:运用云台前置拍摄模式算法,车辆速度V是关于高度H,摄角θ,摄像机长q,倾斜角α,X1,X2,X总,时间间隔T的函数。
H——无人机高度;θ——摄像头摄角,可以由设置的焦距长度f对应所得;
q——摄像头镜头至无人机中央的距离;α——倾斜角α可由云台自由设置所得;
X总,X1,X2——监控画面的总高度,以及各检测线与画面顶部的距离;
T——通过检测线的时间间隔;
2)实验内容
实验内容包括车辆速度、车流量、车辆密度及道路距离的检测,在白天天气状况良好,风力小于5级的城市道路上进行实测,采用人工--程序比较的方法,判断程序的准确性。
Step1:预设好道路参数,无人机接收指令,前往指定路段空中悬停,并调整云台对准道路中央,与无人机进行信息交互。在程序输入飞行器的算法参数。
Step2:开始实时监控,连续拍摄路面交通的影像,并通过图传传输到地面终端。
Step3:地面终端接收并处理影像数据,结合实验算法得出车辆时速、道路的流量、密度、平均交通量、道路服务水平等重要交通参数。
3.2道路交通巡检系统完整运行测试过程
飞行器到达指定位置后,通过图传将图像传回地面控制站,并对图像进行处理。道路评级系统获取图像处理得到的道路参数后对道路进行评级并通过信息发布平台发送到相关部门或微博平台,实现交通诱导。
图3为程序进行道路实时监控、道路评级及信息发布的工作界面,图4为程序进行道路参数检测的工作界面。
3.3实验结果
1)图像处理终端程序的测试
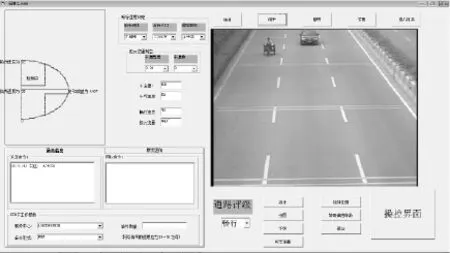
图3 实时监控、道路评级、信息发布工作界面Fig.3 Real time monitoring,road rating,information release work interface
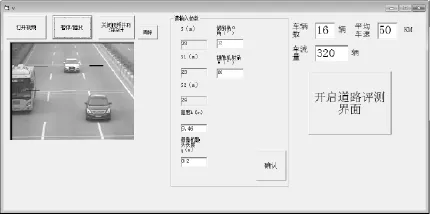
图4 道路参数检测工作界面Fig.4 Road parameter detection work interface
对比人工测量所得参数,数目实验的准确率在75%~88%,程序检测的车辆数目偏小。对比结果见附录。
速度测试的20组数据相比实际速度来说有一定的上下浮动,但实验误差都稳定在10%~20%。
2)道路交通巡检系统完整运行测试
根据实验结果,道路检测系统具有一定的可行性和实用性,可以实现对道路速度及车辆数目等参数的获取,为道路评级系统提供可靠的数据,给出合适的交通诱导信息,并发送到相关部门或微博。
4 结束语
经过对本交通巡检系统整体进行多次试验,并不断完善后,现系统情况如下:
1)系统整体运作有序;2)图像处理软件的处理准确率达到80%左右,基本达到预期指标;3)算法设计对交通服务水平的判定基本符合实际交通状况;4)信息发布子系统实现了实时发送短信及微博的功能。
为实现该系统能在交通道路上持续,广域地进行交通巡检工作,提高系统可行性,本小组正研发电子停机平台,该电子停机平台主要起“中转站+供电站+休息站+信息站”作用,放置在事故多发点附近,并将各平台网点构成一个巡检网络,满足未来可投入大量小型无人机于实际应用的需求,充分辅助现有道路交通监控系统检测道路交通信息,实现智能交通,提高城市道路交通安全性。
[1]彭仲仁.无人飞机在交通信息采集中的研究进展和展望[J].交通运输工程学报,2012(6):119-126.
[2]肖海荣.110 kV架空输电线路巡检机器人视频图像传输[J].计算机工程与应用,2006(10):184-187.
[3]刘锦辉.图像增强方法的研究以及应用[D].长沙:湖南师范大学,2009.
[4]高彦平.图像增强方法的研究与实现[D].济南:山东科技大学,2005.
[5]Abnamczuk T.A Microcomputer Based TV Detector for Road Traffic[M].Tokyo:Symposium on Road Research Program,2009.
[6]王炜,过秀成.交通工程学[M].南京:东南大学出版社,2011.
[7]况爱武.道路服务水平的模糊综合评判[D].长沙:长沙理工大学交通运输学院,2003.
Road traffic patrol system based on a small four rotor UA
WENG Song-wei,LAI Si-cong,CHEN Hai-xiong,LI Jia-jun,ZHU Cheng
(City Rail Transportation College,Shenzhen University,Shenzhen 518060,China)
According to the application requirements of road traffic inspection,routineinspection means to solve the problem of inefficient,high cost,poor flexibility,combined with the characteristics of the four rotor UAV,proposed to the small four rotor UAV as the carrier,carrying the imagine equipment to deal with unexpected road conditions perform intelligent,fast,flexible and efficient road monitoring,inspection operations and improve the road safety level.The system through the long distance wireless real-time image data return,image data processing on the ground terminal,draw a variety of road traffic information;for the traffic management department,members of the public to provide information in real-time and reliable road;road traffic congestion,traffic accidents analysis of early disposal effect.
traffic inspection;road safety;four rotor;UAV;image processing;traffic guidance
TN96
A
1674-6236(2016)03-0078-04
2015-04-02稿件编号:201504024
翁松伟(1992—),男,广东潮州人。研究方向:交通运输。
猜你喜欢
四川劳动保障(2021年8期)2021-12-02
商用汽车(2021年4期)2021-10-17
时代汽车(2021年18期)2021-09-17
石油化工管理干部学院学报(2021年5期)2021-08-06
设备管理与维修(2020年2期)2020-03-24
活力(2019年19期)2020-01-06
中国粮食经济(2018年11期)2018-12-27
现代园艺(2018年2期)2018-03-15
汽车与安全(2017年5期)2017-07-20
汽车与安全(2017年3期)2017-04-26