某型无人机飞行控制计算机硬件设计
2016-09-13 07:25郭昱津王道波
电子设计工程 2016年3期
郭昱津,王道波,路 引
(1.中电集团第二十八研究所 江苏 南京210007;2.南京航空航天大学 自动化学院,江苏 南京210016;3.南京航空航天大学 无人机研究院,江苏 南京210016)
某型无人机飞行控制计算机硬件设计
郭昱津1,王道波2,路 引3
(1.中电集团第二十八研究所 江苏 南京210007;2.南京航空航天大学 自动化学院,江苏 南京210016;3.南京航空航天大学 无人机研究院,江苏 南京210016)
按照某型无人机高性能和小型化的要求,设计并开发了基于DSP为处理核心的飞行控制计算机硬件。详细给出了飞行控制计算机硬件的各个模块的设计方法和原理图,包括:DSP最小系统模块、模拟量信号调理模块、数字量输入/输出模块、DA输出模块、串行通信扩展模块、捷联航姿系统模块、气压高度计模块、铁电存储器扩展模块。该飞行控制计算机具有体积小、自主导航能力强的特点,并成功应用于某型无人机飞行实验。
无人机;飞行控制计算机;硬件设计;DSP微处理器
随着军事发展和战争的需要,无人机发展迅速,飞行控制系统是无人机重要的组成部分,飞行控制计算机又是飞行控制系统软件得以运行的载体。一般情况下,无人机的飞行控制计算机设计应做到集成体积小,方便安装在无人机的控制舱内,重量尽量轻,减少无人机的总体重量,提高任务载荷,CPU可靠性高,功耗低,输出精度高且稳定,FLASH和RAM空间尽量大,能够满足无人机复杂控制程序的存储需求等[1-2]。因此研制一款合适的飞行控制计算机具有重要的意义。量大,A/D转换精确快速等优点,并具有TI公司所开发的功能强大的CCS软件平台[3]。无人机发动机整流后的电源和机载蓄电池作为飞行控制计算机主电源的输入,正常工作状态下,发动机供电给飞行控制计算机,机载蓄电池在无人机启动或发动机出现故障时供电。
2 主要功能模块设计
1 DSP微处理器
飞行控制计算机是无人机飞行控制系统的核心,考虑飞行控制系统的功能和受到无人机对体积和重量等条件约束,所研制的飞行控制计算机选用TI公司的高性能处理芯片TMS320F28335作为飞行控制计算机的微处理器芯片,该芯片是一款TMS320C28X系列浮点DSP控制器,具有功耗小,成本低,精度高,外设集成度高,性能高,数据以及程序存储
2.1DSP最小系统模块
保证DSP正常工作所需的最小外围电路称为DSP最小系统,包括DSP内核、ADC模块、BOOT启动选择、I/O供电模块、电源模块以及JTAG调试模块等。
DSP最小系统的供电系统选用TI公司的TPS767D301双电源芯片,其中DSP内核模块供电为1.8 V,IO的供电为3.3 V;晶振选用30 MHz,DSP的工作频率是经过5倍频放大达到150 MHz;选用MAX6021A作为ADC的外部参考电压,产生2.048 V的基准电压,使ADC模块的精度达到12位;方便系统从串口烧写程序,BOOT启动可以从SCI或者FLASH启动。
2.2模拟量信号调理模块
多路传感器输出的开关量、频率信号、电压信号及电阻信号是经过模拟量信号调理模块电路进行滤波和放大处理,从而调理成适合计数器所需的脉冲的信号和A/D器件采样电平的信号[4]。
模拟量输出的信号包括俯仰、滚转、油门舵机反馈、纵向舵机反馈、横向舵机反馈、航向舵机反馈和电源电压等信号;由于电压输出范围为-10V~+10V,而DSP内部ADC模块采集模拟量的范围是0~+3 V,因此需将-10~+10 V电压转换成0~+3 V。为实现模拟信号调理,设计采用通过加法器进行平移和运放进行衰减,模拟量信号调理电路原理如图1所示。
2.3数字量输入/输出模块

图1 模拟量信号调理电路原理图Fig.1 Schematic diagram of the analog signal conditioning circuit
无人机飞行控制系统中的数字量输出信号包括红外增强器以及诱饵弹等任务设备投放信号、发动机启动/停车信号,这些功能的执行机构由继电器实现。继电器的控制电平为24 V,选用8通道的ULN2803驱动离散数字量输出,而ULN2803的输入电平为5 V,为了电平匹配,使用74HCT245 将DSP的数字量输出信号的3.3 V电平转换为5 V,以驱动ULN2803的输出。
数字量输入信号的外部输入电平为5 V,而DSP的IO口为3.3 V电平,为了达到电平的匹配,选用74LVT245,对数字量输入信号进行电平转换[5]。所设计的数字量输入输出模块电路如图2所示。
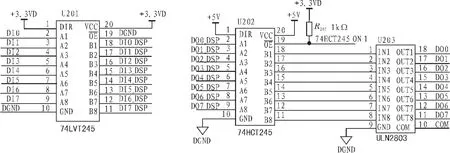
图2 数字量输入输出电路原理图Fig.2 Schematic diagram of the digital input and output circuit
2.4DA输出模块
飞控系统执行机构的控制信号采用模拟量信号,主要是输出指令给舵机,进而舵机的伺服电路驱动执行机构。飞控系统包括油门舵机、纵向舵机、横向舵机和航向舵机[6],这些舵机的控制信号范围为-10~+10 V,至少要4路-10~+10 V。考虑精度高,传输速度快和功耗低等原则,选用TI公司的DAC7718,它支持输出电压范围为-12~+12 V,双极性输出,功耗为14.4 mW/Ch,8通道,误差为±1LSB,采用SPI总线通讯接口,精度达到1LSB,设置时间为15 μs,12位分辨率,所设计的电路如图3所示。
2.5串行通信扩展模块
飞行控制系统的通讯设备有GPS模块、组合导航和无线数传电台等,它的通信接口都为RS232。飞控系统需进行半实物仿真和测试[7],但半实物在回路测试和仿真的通信接口都为RS422,因此需要2路RS422和3路RS232通信接口。DSP只有3路SCI,采用TL16C754扩展四路串口,同时保证TTL电平和RS422或者RS232电平进行匹配,采用SP3232 和MAX3490芯片进行全双工的串行接口转换。
2.6捷联航姿系统模块
捷联航姿系统是捷联姿态航向参考系统的简称,它是将惯性器件直接固定连接在载体上,载体坐标系相对于惯性坐标系的角速度和加速度,分别利用陀螺仪和加速度计进行测量。航向、滚转、俯仰为载体的实时运动姿态,其信息可通过传感器的数据融合算法进行解算。飞行控制计算机模板和捷联航姿系统所需的磁罗盘、陀螺仪、加速度计等传感器固定连接[8],即飞行控制计算机和捷联航姿系统进行一体化设计,所设计的捷联航姿系统结构框图如图4所示。
捷联航姿系统包括陀螺仪、加速度计和磁罗盘等模块。飞行控制计算机对系统对传感器采集到的三维角速度、加速度、磁场分量进行数据融合并计算出四元数,进而反解出三维的姿态角,供飞行控制系统读取姿态。
2.7气压高度计模块
为了保证飞行控制系统的准确性和可靠性,采用惯性测量单元、气压高度计和GPS 3个传感器信号,进行信息融合后得到的高度信息作为飞行控制律运算的高度反馈信号,提高系统高度测量的准确性和可靠性。采用博世科技公司的BMP085气压传感器,具有精度高、体积小和成本低等特点。
BMP085是一款超低功耗、高精度的压力传感器,性能卓越,功耗低,只有3 μA,绝对精度最低可以达到0.03 hPa。通过I2C总线直接与飞行控制计算机相连,气压高度计模块的电路设计图如图5所示。

图3 DA输出电路原理图Fig.3 Schematic diagram of the DA output circuit

图4 捷联航姿系统结构图Fig.4 Structure diagram of the AHRS circuit

图5 气压高度计电路原理图Fig.5 Schematic diagram of the barometric altimeter circuit
2.8铁电存储器扩展模块
无人机飞行控制系统的软件程序在飞行前需要配置许多参数,如航路的航点数据。铁电存储器扩展模块中存储参数,参数的配置是通过上位机软件通过串口通讯实时进行的,其还可以对飞行状态信息进行实时存储,这些飞行信息对飞行状态的后续分析,有很大帮助,尤其在无人机出现故障甚至引起坠机等意外事件,所存储飞行前的飞行数据有助于查找事故原因。
基于总线接口和数据存储空间的两个因素,铁电RAM选定了FM24V10作为数据记录载体,其具有高速I2C总线接口,1M位存储空间,它可直接与飞行控制计算机的I2C模块相接。铁电存储器扩展模块电路原理图如图6所示。

图6 铁电存储器扩展电路原理图Fig.6 Schematic diagram of the ferroelectric memory extension circuit
3 结束语
无人机飞行控制计算机是飞行控制系统软件得以运行的载体,笔者着重从飞行控制计算机硬件的各个具体模块进行了研究,设计并开发了飞行控制计算机。该飞行控制计算机成功应用于某型无人机的飞行试验中,实验和测试结果表明该飞行控制计算机设计合理。
[1]古月徐,杨忠,龚华军.基于DSP的飞行控制器的设计与半实物仿真[J].自动化技术与应用,2005,24(2):28-32.
[2]苏奎峰,吕强,邓志东,等.TMS320x28xxx原理与开发[M].北京:电子工业出版社,2009.
[3]Texas Instruments.TMS320x2833x System Control and Interrupts Reference Guide[Z].Literature Number:SPRUFB0, 2007.
[4]Robert s J M,Corke P I,Buskey G.Low cost flight control system for a small autonomous helicopters[C]//Proc 2002 Austalasian Conference on Roboticsand Automation,2003:27229.
[5]张登成.某小型低空高速无人机控制律设计与仿真[J].弹箭与制导学报,2006,27(1):25-28.
[6]戴文雯.新型无人直升机飞行控制技术研究[D].南京:南京航空航天大学,2007.
[7]Mario Valenti,Brett Bethke,Daniel Dale.The MIT indoor multivehicle flight testbed[C]//IEEE International Conference on Robotics and Automation,2007:2758-2759.
[8]刘爱元,王连生,曲宁.基于PC/104嵌入式计算机的惯导模拟器设计[J].电子设计工程,2005(11):26-30.
Hardware design on flight control computer for a certain UAV
GUO Yu-jin1,WANG Dao-bo2,LU Yin3
(1.The 28th Research Institute of China Electronics Technology Group Corporation,Nanjing 210007,China;2.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;3.Research Institute of Unmanned Aerial Vehicle,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
According to the high performance and miniaturization requirements for a certain UAV,the flight control computer hardware is designed and developed based on DSP as the processing core.The design methods and principle diagrams of each module for the flight control computer hardware are given in detail,including:DSP minimum system module,analog signal conditioning module,digital signal input/output module,DA output module,serial communication expansion module,strapdown attitude system module,barometric altimeter module,ferroelectric memory expansion module.The flight control computer has the characteristics of small volume,strong autonomous navigation ability,and is applied to flight experiment for a certain UAV successfully.
UAV;flight control computer;hardware design;DSP microprocessor
TP211+.5
A
1674-6236(2016)03-0050-03
2015-03-15稿件编号:201503200
郭昱津(1988—),女,江苏南京人。研究方向:无人机飞行控制系统、空中管理等。
猜你喜欢
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
铁道通信信号(2018年12期)2019-01-31
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
电子制作(2016年21期)2016-05-17
火控雷达技术(2016年1期)2016-02-06
科学家(2015年12期)2016-01-20
弹箭与制导学报(2015年1期)2015-03-11