
基于CAN-bus总线的电动密集架控制系统设计
2016-09-13 09:13丁华峰商俊燕
电子设计工程 2016年5期
丁华峰,商俊燕
(常州轻工职业技术学院 江苏 常州 213164)
基于CAN-bus总线的电动密集架控制系统设计
丁华峰,商俊燕
(常州轻工职业技术学院 江苏 常州213164)
信息化时代背景下,智能电动密集架在现代档案库房日益普及,它结合了组合货架和移动货架的优点,真正实现了效率更高、空间更省,无序存放、有序管理。本文主要介绍一种基于高速CAN-bus总线的电动密集架控制系统,采用STM32处理器与CAN总线控制器TJA1050构建高速通信硬件平台,相比传统的RS-485接口通信速率更快,可靠性更高,响应更实时。
CAN-bus总线;智能电动密集架;STM32处理器;TJA1050
随着电子信息技术的发展和成熟,智能化、信息化的仓库管理系统越来越多的得到社会的认同。使用电动密集架是现代化仓储管理技术的重要体现,他把组合货架和移动货架的优点结合到一块,将传统的手动密集架与电器控制系统相结合,并利用微处理器程序控制和电子传动设备操纵密集架的移动列,同时加以一些智能检测技术使档案存储和管理一体化。与传统货架相比,智能电动密集架效率更高,空间更省,列数可根据用户需要定制,系统化管理便于对所存储的物品、资料进行记录,真正实现无序存放有序管理。
本文主要讲述一种基于高速CAN-bus总线的电动密集架控制系统解决方案,与传统电动密集架采用RS-485通信的系统相比,具有响应更快,可靠性更高等特点。
1 系统方案设计
依据国家档案局《DA/T7-2003》直列式档案密集架行业标准和图书密集架国家标准《GB/T 13667.3-2003》,本设计智能电动密集架控制系统构成如图1所示。

图1 电动密集架系统构成图Fig.1 Structure diagram of the electric shelves system
电动密集架系统包括:档案管理及密集架控制系统(接数据库)、上位机PC控制部分(带控制软件)、密集架区内系统(固定列控制和移动列控制)。本文主要讲述CAN-bus总线构建区内总线,实现固定列与移动列之间的高速通信,从而实现高速实时的数据采集与控制。电动密集架区内系统构成如图2所示。
电动密集架区内控制系统,主要分为两部分:固定列控制器和移动列控制器。固定列控制器与上位机PC通过RS232接口相连接,可通过上位机软件控制密集架开关列。固定列控制器与移动列控制器之间通过高速CAN-bus总线实时通讯,安装时固定列可安装在整个区的两侧,也可安装在区的中间任意一列,根据列控制器拨码开关,获取固定列位置,然后根据上位机命令,计算并控制移动列的移动。
移动列控制器主要完成对输入信号的检测,并通过CAN-bus总线发送给固定列控制器,接收固定列控制器的控制命令,控制电机运动;显示屏能显示区列信息及运动状态等,并提供触摸按键实现开关列的脱机控制。

图2 电动密集架区内控制系统构成图Fig.2 Structure diagram of the electric shelves area control system
2 CAN协议与接口电路设计
2.1CAN协议分析
CAN(Controller Area Network)以其高可靠性、高性能、和实时性著称,被广泛应用于工业控制、军事等众多领域。CAN总线传输距离参,可达10 km,抗干扰能力出色,在恶劣环境下也能保证安全快速的传输[1]。
CAN协议分底层协议和高层协议两部分:底层协议和高层协议。底层协议,主要描述了设备之间的通信方式[2],CAN的规范规定了OSI的物理层与数据链路层如表1所示。

表1 OSI开放系统互联模型低两层Tab.1 The OSI Open Systems Interconnection model of low layer two
CAN可兼容多种通信介质,其中最常用的是双绞线,接口有两条线 (CANH和CANL),CAN收发接口的静态电位约2.5 V,此时状态为逻辑‘1’,也叫“隐形”,用CANH比CANL高表示逻辑‘0’。CAN的报文格式有两种,不同之处其实就是识别符长度不同,具有11位识别符的帧称为标准帧,而还有29位识别符的帧为扩展帧,CAN的高层协议就是对报文中的11/29位标识符、8字节数据的使用,在工业控制领域,CANOpen作为CAN总线一种开发的应用层协议,被广泛的使用[3]。
2.2CAN总线接口电路
CAN总线接口电路选用STM32F103RBT6处理器内置CAN总线控制器,辅以CAN总线收发芯片TJA1050完成CAN通信[3]。电路如图3所示。
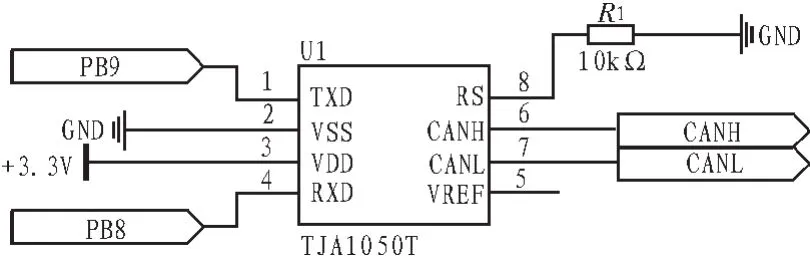
图3 CAN总线接口电路图Fig.3 The CAN bus interface circuit
3 CAN通信软件设计
系统软件设计主要实现固定列控制器与移动列控制器之间的高速轮询,在无控制命令时,轮询获取移动列控制器输入信号等信息,有控制命令时发送指令,控制列的移动[4]。CAN的接收和发送数据是通过中断实现的,每帧数据长度<= 8个字节,自定义通信协议当数据信息>8个字节时,可通过软件拆分成若干个帧发送,接收端根据第一帧数据中的长度信息,自动完成数据的重组[5]。控制器主程序及CAN中断程序流程图如图4和图5所示。

图4 控制器CAN-bus通信主程序流程图Fig.4 The main program flow chart of CAN-bus communication controller
4 结 论
相比传统电动密集架RS-485通信方案,将高速CAN总线应用于电动密集架控制系统,大大提高了密集架移动列运行的响应速度[6],接线简单,运行可靠。用STM32处理器与CAN总线收发器构建电动密集架主从式通讯,成本得到了有效的控制,同时解决了移动列多的情况向系统响应慢的问题,电动密集架系统性能得到了极大的提升。
[1]杨春杰,王曙光,杭红波.CAN总线技术[M].北京:北京航空航天大学出版社,2010.
[2]刘立峰,廖力清,凌玉华.高低速CAN总线在汽车控制系统中的研究与应用[J].上海汽车,2005,9:26-28.
[3]王海燕,龙辛.基于STM32的CANopen通讯协议的实现[J].工业设计,2012,2:131-132.
[4]刘威龙,孙明磊,王頔,等.基于STM32的分布式步进电机控制系统设计[J].数字技术与应用,2012,3:12-14.
[5]XIA Ji-qiang,ZHANG Chuan-sen,BAI Rong-gang,et al. Real-time and reliability analysis of time-triggered CAN-bus [J].Chinese Journal of Aeronautics,2013,1:171-178.
[6]戴文俊,范鹏飞,凌有铸,等.模糊自适应PID控制器在无刷直流电机控制系统中的应用研究[J].安徽工程大学学报,2012,27(1):64-67.
The design of electric shelves control system based on CAN-bus
DING Hua-feng,SHANG Jun-yan
(Changzhou Vocational Institute of Light Industry,Changzhou 213164,China)
Under the background of information,the intelligent electric shelves in the popularization of modern archives,which combines the advantages of the combination of mobile shelves and shelves,and realize the high efficiency,more space,storage disorder,order management.In this paper,mainly introduces a kind of high-speed CAN-bus control system based on electric serried shelf,Construction of high speed communication hardware platform with STM32 processor and CAN-bus controller TJA1050,which interface communication faster,higher reliability,better real time response than RS-485.
CAN-bus;smart electric shelves;STM32Processor;TJA1050
TN402
A
1674-6236(2016)05-0182-02
2015-04-16稿件编号:201504173
丁华峰(1980—),男,江苏常州人,硕士,讲师。研究方向:单片机应用系统设计、嵌入式系统设计。
猜你喜欢
小读者(2021年2期)2021-03-29
汽车观察(2018年10期)2018-11-06
电子制作(2018年11期)2018-08-04
科学中国人(2018年1期)2018-06-08
中国储运(2018年4期)2018-04-08
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
物流技术与应用(2017年3期)2017-05-17
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
