
基于空间网络的时间同步技术研究
2016-09-13 09:13陆翔刘健程子敬林楷刘建勋
电子设计工程 2016年5期
陆翔,刘健,程子敬,林楷,刘建勋
(航天恒星科技有限公司 北京 100086)
基于空间网络的时间同步技术研究
陆翔,刘健,程子敬,林楷,刘建勋
(航天恒星科技有限公司 北京100086)
研究了一种基于邻近空间两航天器相对静止条件下,对错误包、重复包、乱序包具有一定容错能力的新型空间网络时间同步协议。其次,考虑空间网络时间同步协议中两航天器相对运动的情况,利用STK与Matlab软件联合建立异轨航天器时间同步于分发的仿真过程,并通过两航天器之间的相对距离、相对距离变化率和时间同步误差曲线分析航天器相对运动对时间同步精度的影响。最后,在航天器轨道已知的条件下,使用一种误差曲线拟合的补偿方法,降低新型空间网络时间同步协议在相对运动状态下应用的同步误差,明显改善时间同步的误差的范围。
邻近空间;相对运动;时间同步;空间网络;仿真计算;曲线拟合
Mills等人以地面网络中的NTP Interleaver On-Wire[3]协议为蓝本,设计了一个基于时间信息交换类似于网络时间同步协议的PITS(Proximity-1 Space Link Interleaved Time Synchronization Protocol,PITS)协议,该协议结合了CCSDS提出的CCSDS Proximity-1 Space Data Link协议[3]的时间获取能力,成为未来利用空间网络进行航天器的时间分发与同步的趋势。
PITS算法通过在邻近空间链路上进行双向时间传递,提供更快时间同步能力,提高数量日益增长航天器的可量测性,降低采集时间样本存储空间,并依靠底层的协议提供健全的防数据丢失与混乱的功能。
1 PITS协议原理及特性分析
在深空通信中,以轨道飞行器作为时间同步服务器,使用时间同步协议向其他各个邻近航天器提供本地时间同步与分发服务直到地球链路恢复认为是今后的发展趋势。PITS协议最初是为了邻近空间中航天器的时间同步而设计的,其在火星轨道飞行器与火星车的时间同步应用中得到了很好的运用与发展。
1.1时间戳同步原理
时间戳同步原理是网络时间同步NTP的核心,同样也是PITS的重要组成部分。如图1所示,含有准确时间信息的节点A被定为时间服务器端,需要时间服务器进行时间同步的节点B作为时间客户端。设从节点A到节点B与从节点B到节点A的路径是对称的,光单向传播时间(one way light time,OWLT)是双向路径时间(round-trip time,RTT)延迟的一半。当每个节点获得4个连续的时间戳:(例如在图 1中t1、t2、t3、t4对于节点A,t3、t4、t5、t6对于节点B),RTT(双向路径时间)延迟和补偿将由下面公式计算得到。
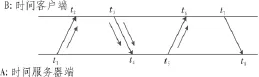
图1 网络时间同步过程示意图Fig.1 Illustration of time synchronization process
对于节点A,利用往返时间戳信息可计算两节点间的时间差后,可进行时间自动校正。

主控制器选用的STM32F103ZET6作为MCU,该芯片在ARM架构下基于Cortex-M3内核,主要有3个优点:(1)最高工作频率可达72 MHz,内部含有512 kbyte的FLASH和64 kbyte的SRAM,并且可根据需要进行外扩,满足大内存和大数据存储,可以保证主控制器的传输速度和稳定性;(2)接口众多且封装小,有利于减少模块的尺寸,符合现如今嵌入式设备向微型化和高集成度发展的趋势;(3)该芯片含有 112个IO口,具有 144 pin 丰富的管脚资源,以及13个通信接口,能够与外围设备实现无缝集成,功能强大,在本系统中可同时实现以太网与无线WIFI的高速通信。

式(1)加式(2),得

同理,对于节点B,

1.2PITS协议及其特性
PITS协议是一个全面的时间交换协议,属于一种简单询问与应答机制,其规定在两个航天器之间交换时间信息的方式。PITS的目的是提供获取与交换更为精确的、可靠的时间戳方法,降低被标记时间戳的航天器与实际时间信息之间的差异。在PITS算法里,时间信息存入SpNTP(Space NTP)数据包,之后封装进 CCSDS Proximity-1 Timestamp标准下的SPDU(Supervisory Protocol Data Unit)进行节点之间的信息交换。同时,PITS协议还是一种状态协议,主要收集有效载荷中SpNTP封装入的各种时间信息,具体时间戳与状态变量如表1所示。PITS利用每个节点时间戳信息以及各状态变量计算RTT时延与时间补偿offset。

表1 PITS使用的时间戳与状态变量Tab.1 Timestamp and state variables used in PITS
1.2.1PITS的工作方式
PITS有以下3种运行模式[5]:基本对称模式BSM(Basic S-ymmetric Mode)、交叉存取对称模式ISM(Interleaved Symmetric Mode)和广播模式BM(Broadcasting Mode)。
1)BSM工作模式
时间服务器A将发送时间戳封装入SpNTP中,并将Sp-NTP包通过SPDU发送给B。每个torg和trec分别存储接收到的状态变量rec,目的地时间戳状态变量dst。发送起始时间戳之前,状态变量aorg存储目前的本机时间。SpNTP包发送结束后,txmt就会含有时钟信息。B收到SpNTP后,更新本地rec、dst、org等状态变量,并将新的时间信息通过SpNTP发送回去。从A接收到SpNTP包后,B中的rec状态变量存储txmt时间戳;dst状态变量存储B当前接收到的本机时钟。整个BSM方式中数据包的交换过程与图1相一致,图2为每个节点内状态变量在各个时刻的变化过程[3]。其中,有点的方格为航天器的系统时钟,系统时钟将SpNTP包的发送或接收时间标记。具体有效载荷数据包的更新以及状态变量的更改依据文献[1~3]中的发送与接收过程。

图2 BSM模式下SpNTP包和状态变量的示意图Fig.2 llustration of basic mode showing SpNTP packet and state variables
2)ISM工作模式
ISM工作模式下SpNTP包的格式与基本模式是一样的。ISM模式比BSM模式多了一个状态参量borg。此时,aorg存储每一个偶数(或奇数)时间信息,而borg存储每一个奇数(或偶数)起始时间戳[3],如图3所示。
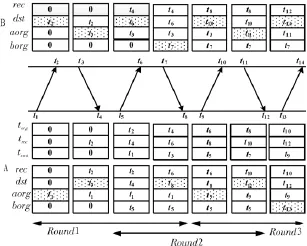
图3 ISM模式下SpNTP包和状态变量的示意图Fig.3 llustration of interleaved mode showing SpNTP packet and state variables
SpNTP发送过程中,ISM的发送时间戳在其发送SpNTP包后才被得到,其时间戳信息将在下一个发送过程放入SpNTP进行处理。因此,当前发送时间戳与SpNTP包传输后即被近物理层记录的发送时间更为接近,接收方接收带有发送时间戳信息的SpNTP数据包后,立即得到更加精确的、与物理层发送SpNTP包的时间相接近的发送时间戳。这也造成ISM模式下需要传送比BSM模式多2轮的SpNTP包用以进行时间信息的同步。
1.2.2PITS的容错性
由于空间环境的严酷性,在SpNTP数据传输过程中可能会发生一些错误。为了在环节出现严重错误的情况下还能得到正确的结果,容错性对协议来说是至关重要的,需要持续保障的。容错性[6]是指协议不会传递错误数据包,并将包内不正确的信息传给更高一层进行offset补偿和RTT延时计算。PITS协议提供处理错误包、乱序包和重复包等情况的能力,这3种情况下PITS正常工作体现了PITS较好的容错性。
2 相对运动环境下PITS协议的误差分析与补偿验证
由于空间环境极其复杂,航天器状态不断变化,造成星间的链路有可能受到来自各个方面因素影响[9]。本文在忽略太阳辐射、电离层、Sagnac效应等外界空间环境对星间链路影响的前提下,突破PITS限制的“进行时间同步的两个航天器相对静止”这一条件,利用STK与Matlab联合仿真分析能力,建立两个邻近空间航天器进行PITS过程空间仿真模型,分析由于航天器相对运动造成的PITS同步时间误差。在
STK采集到的毫秒级数据基础上,利用大数据曲线拟合的思想,使用Matlab提供的cftool工具箱获得两个航天器之间相对距离变化曲线,人为提高计算精度去分析高精度的时间同步误差。
2.1航天器相对运动下PITS同步性能的Matlab分析
仿真场景中主要有两个航天器(SS与Small_Sat)。令航天器Small_Sat与航天器SS在同一轨道面,但其为大椭圆轨道,且航天器Small_Sat的轨道周期TSmall_Sat为航天器SS轨道周期TSS的3倍。根据PITS协议的原理,由于航天器之间星间链路的传播时延随两个航天器的相对距离变化而变化,两个有相对运动的航天器,其链路往返时延不相等。因此,公式(3)将变为:

在航天器有相对运动的前提下,PITS的同步误差主要来源于时间同步数据包往返时延不一致,造成航天器每次时间同步其误差与相对距离变化率和相对距离有关,而这个误差值为图4为航天器Small_Sat周期内与航天器SS相对距离和相对距离变化率的曲线。

图4 航天器Small_Sat周期内相对距离与相对距离变化率Fig.4 Range and range rate between Small_Sat and SS in period of Small_Sat
利用Matlab大数据曲线拟合的方式构造两个航天器相对距离的曲线方程,按照PITS协议的BSM工作模式、单向传播时延公式(设定航天器PITS硬件处理时延为1μs)以及高阶最小二乘(或傅里叶)拟合逼近的两个航天器相对距离曲线,计算得到一次时间同步过程中的时间同步误差,图5、图6、图7中的蓝线为第一、二、三可见时间范围的PITS时间同步误差。
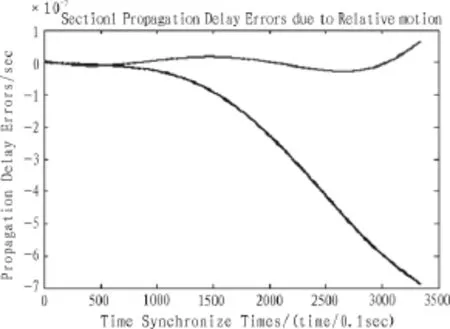
图5 时间同步误差与补偿后误差(第一段可视范围)Fig.5 Time synchronization errors and time synchronization errors after offset(Section 1)
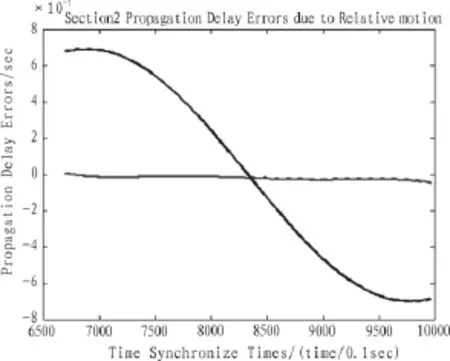
图6 时间同步误差与补偿后误差(第二段可视范围)Fig.6 Time synchronization errors and time synchronization errors after offset(Section 2)

图7 时间同步误差与补偿后误差(第三段可视范围)Fig.7 Time synchronization errors and time synchronization errors after offset(Section 3)
2.2PITS时间同步误差补偿
由以上曲线可以看出,在航天器[9]相对距离较远、相对运动较大的时候,PITS的时间同步误差相对较大;在航天器相对距离较远、相对运动较小以及航天器相对距离较近、相对运动较大的情况下,由相对运动引起的PITS时间同步误差则比较小。在两个航天器轨道已知的情况下,可以预估PITS时间同步误差曲线,利用误差曲线构造补偿曲线变成为可能。考虑星载计算机的性能与功耗,使用相对接近误差曲线的对称曲线进行误差补偿,可以有效的降低PITS时间同步的误差。在上面仿真场景中,使用3阶误差补偿曲线,能将时间同步误差将低1个数量级。补偿后的时间同步误差如图5、图6、图7中的灰色曲线。
3 结 论
在所建场景下通过以上图示,可以看出随着相对速度与相对距离的变化,使用PITS协议进行空间网络时间同步的误差一般多为十几微秒级,且同步精度与航天器相对距离和径向速度有关,相对距离越小、径向速度越快,则PITS同步误差越小。考虑邻近空间的定义与PITS应用条件的限制,在航天器相对运动的情况下,PITS时间同步误差可控制在毫秒量级以下。利用预测已知轨道时间同步误差曲线拟合补偿方法,可以明显降低误差的范围,使本场景下的同步误差曲线更为平滑。在深空通信中,只需利用轨道器上精确的时钟,便可为行星地表的探测器与相邻航天器提供时间同步的服务。PITS还处于刚刚起步阶段,深入研究PITS的使用机理与补偿方式,可为我国深空探测[10]及天地一体化网络服务提供可靠的时间分发与同步手段。
[1]朱俊.基于星间链路的导航卫星轨道确定及时间同步方法研究[D].长沙:国防科学技术大学,2011.
[2]Mills D.Analysis and simulation of the NTP On-Wire Protocols[EB/OL].http://www.eecis.udel.edu/~mills/onwire.html.
[3]CCSDS Recommendation for Proximity-1 Space LinkProtocol.Coding And Synchronization Sublayer[S].Retrieved,2008-05-26.
[4]Mills D,Martin J,E,et al.Network Time Protocol Version 4: Protocol and Algorithm Specification[R].RFC 5905,IETF,June,2010.
[5]Woo S S,Gao J,Mills D.Space Time Distribution and Synchronization Protocol Development for Mars Proximity Link[C]. AIAA SpaceOps,2010.
[6]Simon S.Woo.Analysis of Proximity-1 Space Link Interleaved Time Synchronization(PITS)Protocol[C]//IEEE Globecom 2011 proceedings.
[7]黄飞江,卢晓春,吴海涛,等.基于星间距离变化的动态双向时间同步算法[J].武汉大学学报(信息科学版),2010(1): 13-16.
[8]王倩,王祖林,何善宝,等.动态星间链路分析及其STK/ Matlab实现[J].电讯技术,2010,50(9):19-23.
[9]李胜超,方群.航天器中性浮力变质心实验体六自由度动力学建模研究[J].电子设计工程,2013(12):95-98.
[10]张子川,韩和同,管兴胤,等.基于反射滤光方法的氟化钡快响应γ射线探测技术[J].现代应用物理,2013(30):225-231.
The research of space network time synchronization technology is on the base of the orbit prediction
LU Xiang,LIU Jian,CHENG Zi-jing,LIN Kai,LIU Jian-xun
(Space Star Technology CO.,Ltd,Beijing 100086,China)
In this work,we consider a new space network time synchronization protocol which is capable of cope with error packets,duplicate packets as well as disorder packets base on two spacecraft under relatively static condition in proximity-1 space.Secondly,we analyze the synchronization performance of this protocol via relative range and range rate between the two spacecraft with combinations of Matlab and STK simulation software in case of the relative motion with spacecraft.Finally,this paper utilizes a error curve fitting compensating method to improve space network time synchronization protocol time synchronization accuracy in the application of the relative movement condition.It is significant improvement in time synchronization errors.
proximity space;relative motion;time synchronization;space network;simulation;curve fitting
TN915
A
1674-6236(2016)05-0138-04
2015-04-08稿件编号:201504069
陆 翔(1989—),男,北京人,硕士研究生。研究方向:空间通信与空间网络。
猜你喜欢
国际太空(2022年7期)2022-08-16
移动通信(2021年5期)2021-10-25
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
空间科学学报(2020年3期)2020-07-24
智能计算机与应用(2020年10期)2020-03-18
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
导弹与航天运载技术(2016年2期)2016-10-14
