基于HLA的光学设施运控仿真联邦成员设计与优化
2016-09-08 01:35李承民张书媛
电子设计工程 2016年1期
李承民,张 涛,张 斌,张书媛
(1.中国科学院大学 北京 100049;2.中国科学院空间应用工程与技术中心 北京 100094;3.武汉大学经济与管理学院,湖北 武汉 430072)
基于HLA的光学设施运控仿真联邦成员设计与优化
李承民1,张 涛2,张 斌2,张书媛3
(1.中国科学院大学 北京100049;2.中国科学院空间应用工程与技术中心 北京100094;3.武汉大学经济与管理学院,湖北 武汉430072)
巡天类光学载荷是空间天文观测的重要载荷,运控系统是其中的重要组成。在利用HLA分布式仿真技术对巡天观测仿真过程中发现,空间中复杂的环境以及较多的成像约束使得运控类联邦成员任务负担较重,计算需求大,该联邦成员的运算效率直接影响整体仿真效率。因此,本文通过设计乐观约束判别算法以及基于openMP多线程技术优化该成员的运控运算方式,提高运行效率。实验表明,改进后的运控联邦成员大幅提高了光学设施仿真任务执行效率,仿真联邦成员的运算时间减少55%,仿真联邦整体运行时间减少了27.4%。
HLA;光学设施;联邦设计;openMP;乐观策略
随着我国载人航天事业的迅速发展,空间载荷呈现出高复杂性、高精确性以及对工作环境高要求的特点。为了高效地验证和优化载荷的设计方案,国内外均采用仿真方法开展了大量的工作[1-4]。但是,对某些复杂的空间载荷,如本文涉及的光学设施,其在轨观测任务受到多种因素的限制,且各约束条件之间存在交叉耦合关系,使用传统的单机方法进行仿真时,运算速度和模型相似度都受到很大限制,以至于结果可信度并不高。因此需要采用分布式仿真,并对仿真框架以及每个仿真模型进行合理的设计和优化。基于HLA的分布式仿真系统是解决此类问题的良好方案。
在利用HLA分布式仿真技术对光学载荷巡天观测进行仿真的过程中发现,控制联邦成员负责巡天任务总体规划、复杂约束条件判断和仿真流程控制,是整个仿真联邦的核心。但由于观测要考虑到如光学平台位姿、天区划分、日月杂散光影响、帆板视场遮挡、结构干涉、SAA区影响、停机时间等众多因素,无论是任务规划还是运行时状态监测均需考虑这些约束,使得运控联邦成员计算量巨大,成为整个仿真系统的瓶颈。
文中采用了基于openMP的并行算法和乐观约束判别算法,对运控联邦成员进行了优化,降低了运控联邦成员的计算复杂度,提高了运算效率,从而使得整个仿真联邦运算效率提高。
1 大型光学设施仿真联邦总体设计
为了验证现有设计方案,充分考虑任务运行中的能源、杂散光等约束条件,设计了基于HLA的分布式仿真系统,仿真系统设计如图1所示。仿真系统以完成科学目标的任务时间定量分析为结果,给出最终的大致结论,并对运营规划算法给出评估。整个仿真联邦分为3个模块:计算模块、相机模拟模块和运行时监测模块。各模块之间数据通过RTI进行交互。
1.1计算模块
计算模块包括轨道计算联邦成员、日月位置计算联邦成员、姿态计算联邦成员和意外事件联邦成员。
1)轨道计算联邦成员计算J2000坐标系下光学设施的位置和姿态。
2)日月位置计算联邦成员利用DE405星历库计算太阳月球的位置。
3)姿态计算联邦成员根据姿态算法计算出当前大型光学设施的姿态。
4)意外事件联邦成员按照预定概率产生意外事件。
1.2仿真模块
仿真计算模块包括运控联邦成员、相机联邦成员和数据统计联邦成员。
1)运控联邦成员根据光学设施的位姿、日月位置以及历史观测记录利用任务规划算法计算出下一次要观测的目标区域,是整个仿真联邦的核心。
2)相机联邦成员模拟相机实际拍摄时工作方式。
3)数据统计联邦成员记录整个仿真联邦运行中的数据,用于结果分析和错误处理。
1.3监测模块
监测模块包括SAA区联邦成员、帆板监测联邦成员、约束条件判断联邦成员和虚拟目标联邦成员。
1)SAA区联邦成员用来判断光学载荷是否在 SAA区中,用来控制光学设施工作状态。
2)帆板监测联邦成员根据太阳位置计算帆板状态,并判断帆板是否出现在视场中。
3)约束条件判断联邦成员用于修正乐观约束判断算法带来的误差。
4)虚拟目标联邦成员用来对被观测目标行为进行模拟。
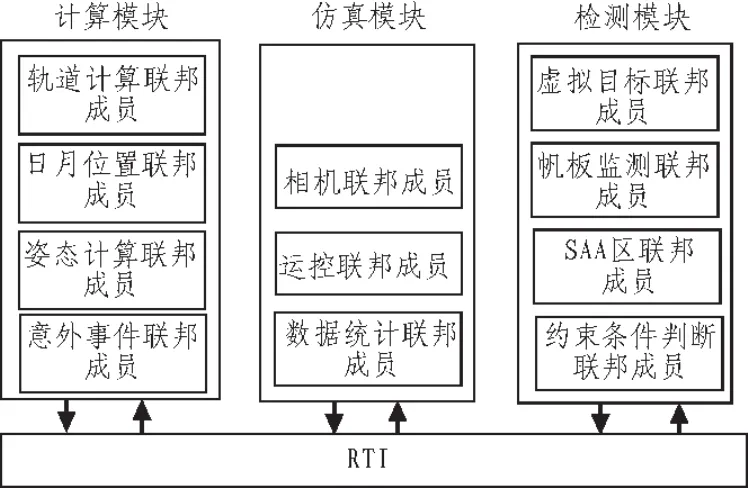
图1 仿真联邦结构图Fig.1 Structure diag ram of the simulation system
2 运控联邦成员设计
HLA(High Level Architecture,高层体系结构)是分布式仿真的高层体系结构,用于实现大型复杂仿真系统的联合系统仿真及扩展。其基本思想就是使用面向对象的方法,设计、开发及实现系统不同层次和粒度的对象模型,来获得仿真部件和仿真系统高层次上的互操作性与可重用性[5-6]。
在整个大型光学设施仿真联邦中,运控联邦成员负责天区规划以及部分约束条件判断,为整个联邦的核心。运控联邦成员设计的好坏直接影响到整个仿真联邦的工作效率以及仿真结果的可信程度。
运控联邦的整体流程设计如图2所示,在接收到来自其它联邦成员的数据之后,根据任务规划算法计算出目标天区,发送给其它联邦成员,并根据从其它联邦成员接收到的消息来判断观测是否成功。重复此过程,直到完成整个仿真任务。
其中计算目标天区模块为整个运控联邦成员甚至是整个仿真系统的核心。在光学载荷整体的设计方案确定之后,目标天区规划算法是唯一影响任务完成时间的因素,并且计算目标天区所用时间占运控联邦成员运行时间的70%。所以目标天区计算模块设计的好坏直接影响到整个仿真的结果与仿真的速度。
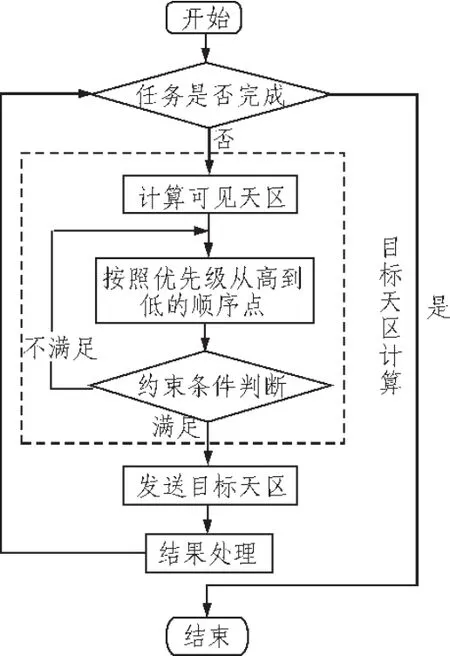
图2 运控联邦成员流程图Fig.2 Flow chart of the control federation
3 运控联邦成员优化
运控联邦成员需要对大量天区进行约束条件计算,为整个联邦中计算量最大的联邦成员,成为了提升整个仿真速度瓶颈,因此如何对运控联邦成员进行优化是运控联邦成员设计的关键。针对运控联邦成员可以从计算方法优化以及约束判别算法两个方面进行优化。本文分别使用基于openMP的并行算法和乐观约束判别算法对上述两个方面进行了优化。
3.1基于openMP的优化
OpenMP是一个为在共享存储的多处理机上编写并行程序而设计的应用程序接口,是可移植多线程应用程序开发的行业标准,在细粒度与粗粒度线程技术上具有很高的效率[7-8]。
3.1.1算法并行可行化分析
通过对整个联邦成员各部分运行时间统计可知,计算可见天区是整个运控联邦成员中计算量最大的部分,约占整个运控联邦运行时间的50%。
对可见天区观察的实质为对划分好的每一个子天区进行约束条件的计算,此部分计算相互独立,且各个天区的计算之间并没有前后的逻辑关系,适合于将其计算并行化以提高计算效率[9-13]。
3.1.2并行程序设计串行化算法代码为:

对坐标为(I,j)的天区进行可见性判断

若本串行代码的基础上通过嵌入指令语句将外层循环并行化,虽然工作量小,但是在算法的内层循环中,启动数据规约仍然需要系统开销,如果能够避免该操作,将进一步提高并行效率。对并行算法进行重新设计可解决此问题。改进后的算法并行的粒度较原来相比更细,并行程度更高。
重新设计后代码:

对坐标为(I,j)的天区进行可见性判断

针对改进后的算法,使用嵌入指令语句#pragma omp paraellel for将计算并行化,可显著提高计算效率。
3.1.3实验结果
实验平台如表 1所示,openMP优化选项开启,使用openMP优化可见天区的计算,实验数据为程序多次运行取平均值,如图3所示。通过使用openMP使得计算效率提高了42%。
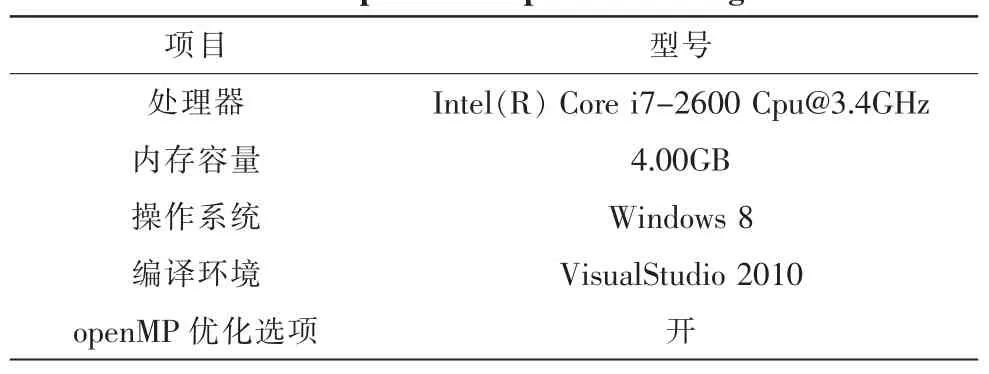
表1 实验平台配置表Tab.1 The experimental platform configuration
3.2乐观约束判别算法
3.2.1传统约束判别算法
由于光学载荷自身成像需要,针对单一目标的观测需要连续拍摄N个仿真步长,且在拍摄过程中要时刻满足观测约束条件。因此,在对目标天区进行约束条件计算时要对未来N个仿真步长中所有约束条件进行计算,只有全部满足约束的可见天区才能够作为要观测的天区,仿真流程如图3所示。这种约束判别算法可保证计算得出的目标天区一定符合要求,但是使得计算复杂度大幅度提高。

图3 openMP优化运行时间对比图Fig.3 Comparison of run time about the optimistic about openMP
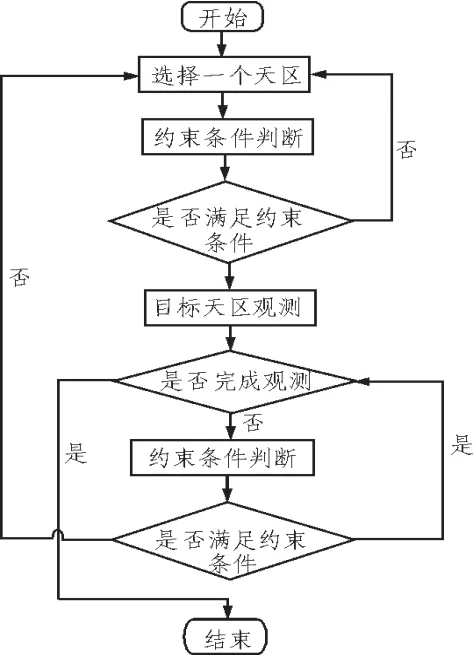
图4 传统约束判别算法流程图Fig.4 Flow chart of traditional constrain judge algrithm
3.2.2乐观约束判别算法
通过对运行时数据分析发现,在持续N个仿真步长的观测过程中太阳、月亮的位置变化不到0.5%,即主要约束条件变化幅度非常小。对于绝大部分天区来说,如果能够满足初始时刻的约束条件,就能满足整个观测时间段内的约束。
基于以上分析,设计了乐观约束判别算法,即认为满足初始时间约束条件的天区为可观测的目标天区,并在仿真系统中加入了运行时约束条件判断联邦以修正此算法带来的误差,算法流程如图 4所示。此算法在牺牲一定的观测成功率的代价下,能够降低计算复杂程度,提高仿真速度。
通过实验数据分析,在多色成像模式与无缝巡天模式下,因采用乐观约束判别算法造成的观测失效次数与总观测次数如表2所示。引入乐观的约束条件判断机制之后而造成的观测失效只占了全部观测次数的0.67%。拍摄失败次数完全在可以接受的范围之内。在本联邦成员中,采用了乐观约束判别算法。
3.2.3实验结果
由于计算可见天区耗时与观测点选取有关,且方差很大。所以统计了200次目标天区计算,耗时累计值如图 5所示,可见,乐观约束判断算法使得程序计算时间缩短了33.7%。
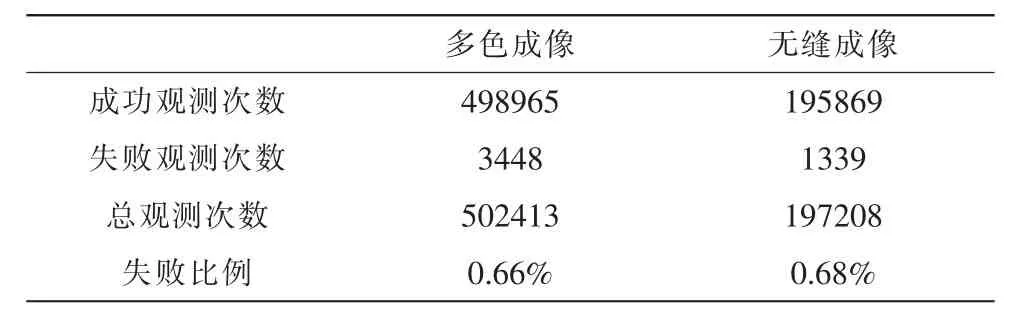
表2 乐观约束判别算法观测结果表Tab.2 Result of observation with optimistic constrain judge algorithm
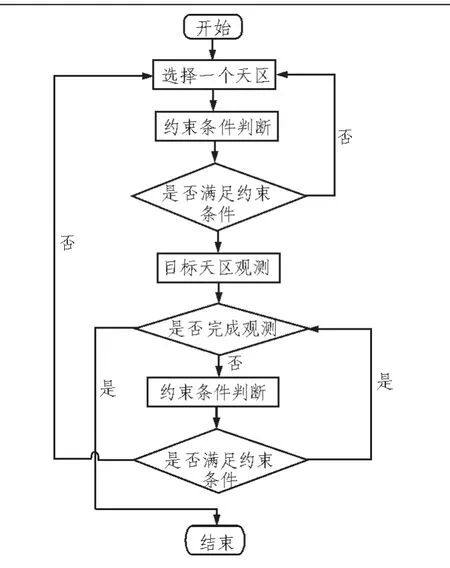
图5 乐观约束判别算法流程图Fig.5 Flow chart of optimistic constrain judge algorithm
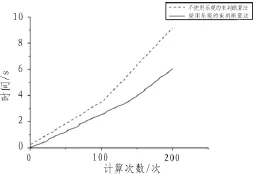
图6 乐观约束判别算法耗时Fig.6 Time cost of optimistic judge algorithm
3.3实验结果
使用基于openMP的并行算法优化和基于贪心的乐观约束判别机制后,运控联邦成员完成200次观测耗时如图6所示。可见使用基于openMP的并行算法优化和基于贪心的乐观约束判别机制使得整体运行时间减少了55%。从而使得整个仿真联邦仿真速度提高,最终使得仿真时间减少了27.4%。
4 结 论
在综合考虑了空间中复杂的环境以及众多成像约束对运控联邦成员运行效率影响的基础上,文中采用了基于openMP的并行优化方法和基于贪心的乐观约束判别算法对运控联邦成员进行了优化,降低了运控联邦成员的计算复杂度,使得仿真整体时间减少了27.4%。同时基于openMP的并行方法和乐观约束判别算法对于其他复杂环境、多约束的大规模仿真系统也有一定的借鉴意义。
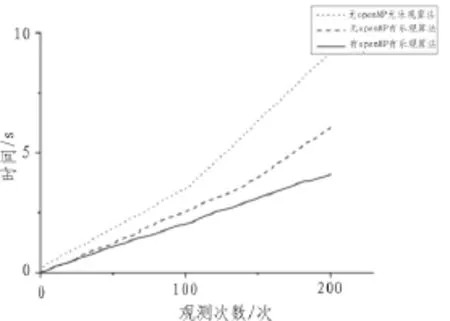
图7 优化前后耗时对比Fig.7 Time cost comparison before and after optimization
[1]张彩娟.STK及其在卫星系统仿真中的应用[J].无线电通信技术,2007(4):45-46,61.
[2]张万鹏,陈瓂,沈林成.基于STK/VO的航天任务视景仿真系统[J].计算机仿真,2005(10):89-92.
[3]田八林,袁建平,岳晓奎.基于STK的GPS空间覆盖特性仿真分析[J].计算机仿真,2008(6):46-49.
[4]邓晶,张明智,李志强,等.基于STK的信息作战态势三维可视化表现方法研究[J].系统仿真学报,2010(11):2654-2659.
[5]史璐莎,张斌,张涛.MATLAB环境中HLA联邦成员开发技术研究[J].计算机技术与发展,2013(10):10-14,18.
[6]IEEE Standard for Modeling and Simulation(M&;S)High Level Architecture(HLA)--Framework and Rules-Redline[J].IEEE Std 1516-2010(Revision of IEEE Std 1516-2000)-Redline,2010:1-38.
[7]殷顺昌.OpenMP并行程序性能分析[D].国防科学技术大学,2006.
[8]蔡佳佳,李名世,郑锋.多核微机基于OpenMP的并行计算[J].计算机技术与发展,2007(10):87-91.
[9]陈永健.OpenMP编译与优化技术研究[D].清华大学,2004.
[10]徐磊,徐莹,张丹丹.多核构架下OpenMP多线程应用运行性能的研究[J].计算机工程与科学,2009(11):50-53,57.
[11]李梅.基于OpenMP编程模型的多线程程序性能分析[J].电子设计工程,2014(23):42-44,50.
[12]杨秋虎.LabWindows/CVI多线程技术的应用[J].电子科技,2015(3):19-21,37.
[13]韩旭,韦高,李瑞阳,等.基于多纯程技术的天线实时测量系统[J].现代电子技术,2013(13):115-119.
Design and optimization of HLA-Based optical facility control federate simulation
LI Cheng-min1,2,ZHANG Tao2,ZHANG Bin2,ZHANG Shu-yuan3
(1.University of Chinese Academy of Sciences,Beijing 100094,China;2.Technology and Engineering Center for Space Utilization,Chinese Academy of Sciences,Beijing 100094,China;3.Economics and Management School of Wuhan University,Wuhan 430072,China)
Sky survey optical facilities are becoming more and more important in astronomical observation,and control is the core of this kind of facilities.In the process of building the HLA-based astronomical observation simulation system,it is found that control federation's efficiency directly affects the overall efficiency,due to multi-constrain of the observation.For improving the simulation efficiency,the optimistic judging algorithm and openMP-based optimization method are designed. The result show that new control federation greatly improves the efficiency of optical facilities simulation,and the computational complexity is decreased;the overall running time is reduced by 43%.
HLA;optical facilities;federation design;openMP;optical judging algorithm
TP399
A
1674-6236(2016)01-0031-04
2015-04-09稿件编号:201504083
国家重大专项(Y214102RN)
李承民(1989—),男,北京人,硕士。研究方向:系统仿真。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
家庭影院技术(2020年10期)2020-12-14
家庭影院技术(2019年7期)2019-08-27
航天返回与遥感(2014年1期)2014-07-31
自动化博览(2014年12期)2014-02-28
自然资源遥感(2014年2期)2014-02-27
俄罗斯问题研究(2013年1期)2013-03-11
中国宪法年刊(2012年0期)2012-03-25