
船舶电力推进系统五相电机的缺相容错优化运行
2016-09-07 08:56隗宇,许涛
上海船舶运输科学研究所学报 2016年1期
隗 宇, 许 涛
(上海船舶运输科学研究所 航运技术与安全国家重点实验室, 上海 200135)
船舶电力推进系统五相电机的缺相容错优化运行
隗宇,许涛
(上海船舶运输科学研究所 航运技术与安全国家重点实验室, 上海 200135)
为保证气隙磁动势在缺相运行时不发生明显改变,针对船舶电力推进系统中五相电机缺一相的工况,对激磁电流进行调制。基于非线性规划的原理,将对激磁电流的调制转化为非线性规划的数学问题并利用数学计算的方法进行解决。计算结果准确、调制精度非常高,通过MATLAB仿真验证该方法设计合理,缺相时利用该方法优化后性能明显提升,缺相容错运行效果较好。
五相电机; 激磁电流; 缺相容错; 非线性规划
0 引 言
近年来,制造技术的不断发展、新材料的应用以及制造工艺的不断提高等,使得电力推进系统的可靠性大大增强,对异步电机驱动系统进行的故障分析和诊断及容错运行研究日益增多,越来越受到重视[1]。
多相异步电机调速系统不仅能使电力推进系统具有更强的功率输出能力,而且可以从系统固有结构和设计方面提高调速系统的可靠性。特别是在损失1个或多个定子绕组励磁的同时剩下的可正常工作的绕组≥3个时,尽管多相异步电机绕组结构不对称、激励电流不平衡,但是其仍然具备重新启动和继续运行的能力,可在较长时间内不间断地工作。此外,其还能在需求不高的场合适应工作的需求,在方便维护时正常停机维护和修理。因此,多相电机比三相电机更可靠,具有更广泛的适应性[2]。对于多相调速系统而言,最常见的故障包括逆变器功率器件损坏和电机定子绕组断路,结果会造成电机的1相或几相定子绕组开路。可见,缺相运行是系统出现故障后的一种典型工作状态。当在这种结构不对称的条件下运行时,电机的动态特性将发生很明显的畸变。因此,需要对多相感应电机调速系统缺相运行状态下的性能进行深入分析,从而对逆变器的控制策略和调制方式进行优化,提高缺相工作时的性能。
1 五相电机电力推进系统基本结构
五相电机电力推进系统基本结构见图1,其中逆变器由5个相互独立的H桥单元组成,每个桥臂的2个端子分别接上1个电机绕组的2个端子,这种接线方式的优点是不存在电机接线的中性点,每个H桥所连接的绕组之间电气结构独立,通过电磁关系联系起来[3-4]。若任意一组H桥发生结构故障,电气接线方面不存在直接影响。
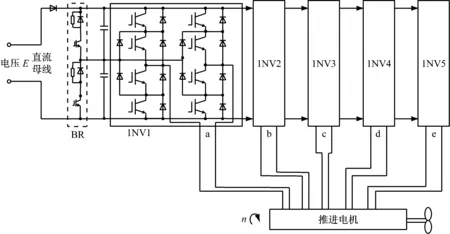
图1 五相电机电力推进系统基本结构
逆变器的控制采用矢量控制的方式。这里关注的是电机的控制效果,可对螺旋桨负载模型进行简化,负载系统采用简易的螺旋桨模型,认为负载转矩与转速的平方成正比,即
M=Kn2
(1)
式(1)中:K为比例系数(即螺旋桨负载系数),可根据经验值选取。
根据前述模型,当电机中的某些绕组或逆变器的某些通道发生故障时,可避开这些故障单元,通过降低负荷继续运行,保证了系统的可靠性。此外,还可通过优化控制策略及在发生故障时缺相容错运行,使剩余各相电流平衡,进而维持磁通的圆形形状,进一步改善系统发生故障时的运行状态,使其性能尽量接近正常工况时的性能。
2 五相电机运行情况分析
2.1五相电机正常运行分析
将五相异步电机看作五端口网络,每个定子相绕组的2个端子分别接在1个独立逆变器H桥的2个端子上。由于各个网络不存在直接的电气连接,因此单个驱动单元的损坏并不影响其余4个单元的正常运行。由此,整个系统的可靠性得以改善[5]。但是,该系统存在5个电机定子绕组的电磁耦合,激磁电流中存在的任何不平衡状态都会对电机性能产生较大影响。
接通交流电后的单相绕组在气隙中产生的气隙磁动势幅值随时间交变脉动为脉振磁动势。设a相绕组产生的脉振磁动势幅值位于相位α=0,且相绕组所通电流相位角为0,则此时的基波磁动势为
(2)
式(2)中:p为极对数;I为电流幅值;N为线圈匝数。令
(3)
则每相磁动势可表示为
(4)
电机基波合成磁动势为
(5)
由式(5)可知合成基波磁动势为一个圆形旋转磁动势,这也证明了电机正常稳定运行条件下磁链波形为圆形。现通过MATLAB仿真列出电机五相正常运行时的各项性能参数(见图2)。
a) 转速波形
b) 转矩波形

c) 调制电压波形
d) 定子磁链波形
e) 电流波形
3.2五相电机四相运行分析
假设c相断路时电机四相运行,还是保持剩余相激磁电流不变,则基波磁动势表示为
(6)
由式(6)可知合成基波磁动势将变为一个椭圆形的旋转磁动势,其磁势大小可能无法满足正常运行的要求。
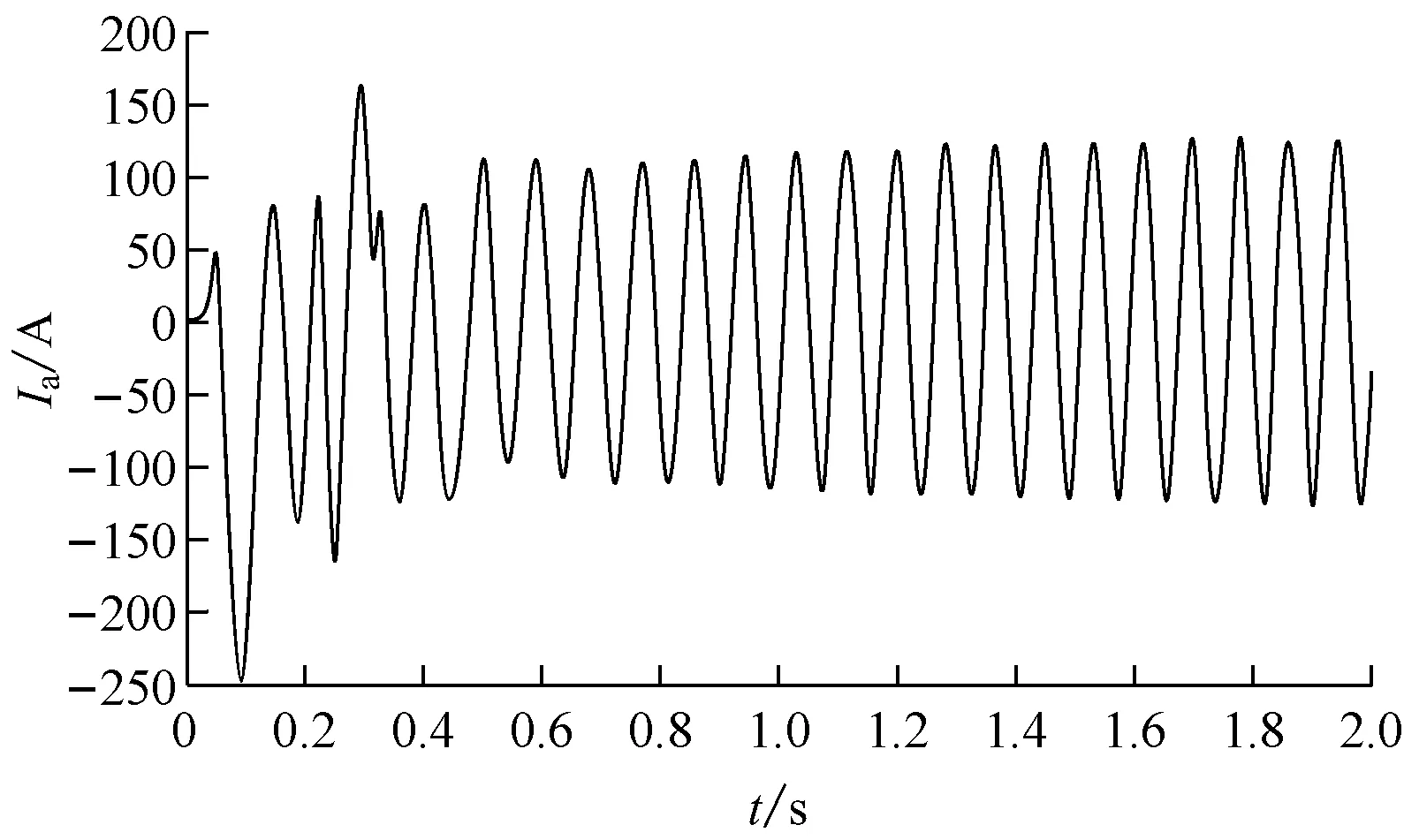
对于五相异步电动机而言,在缺相条件下运行的相数不少于三相,则电机一般都可自启动和运行,但其相关性能会发生一定变化,即:电磁转矩和气隙磁密会下降;磁链波形不再是标准的圆形,会发生一定程度的畸变;电机的运行效率和平稳性等也会受到一定程度的影响[6]。下面对五相电机运行时的情况进行分析,主要比较五相电机正常运行及五相电机缺一相时的相关性能参数。图3为五相电机缺c相运行时的各个性能参数。
a) 转速波形
b) 转矩波形
c) 电流波形
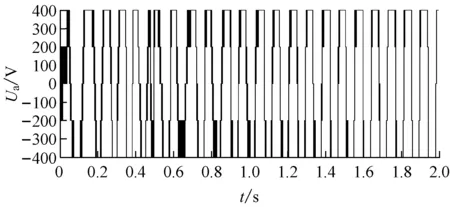
d) 调制电压波形
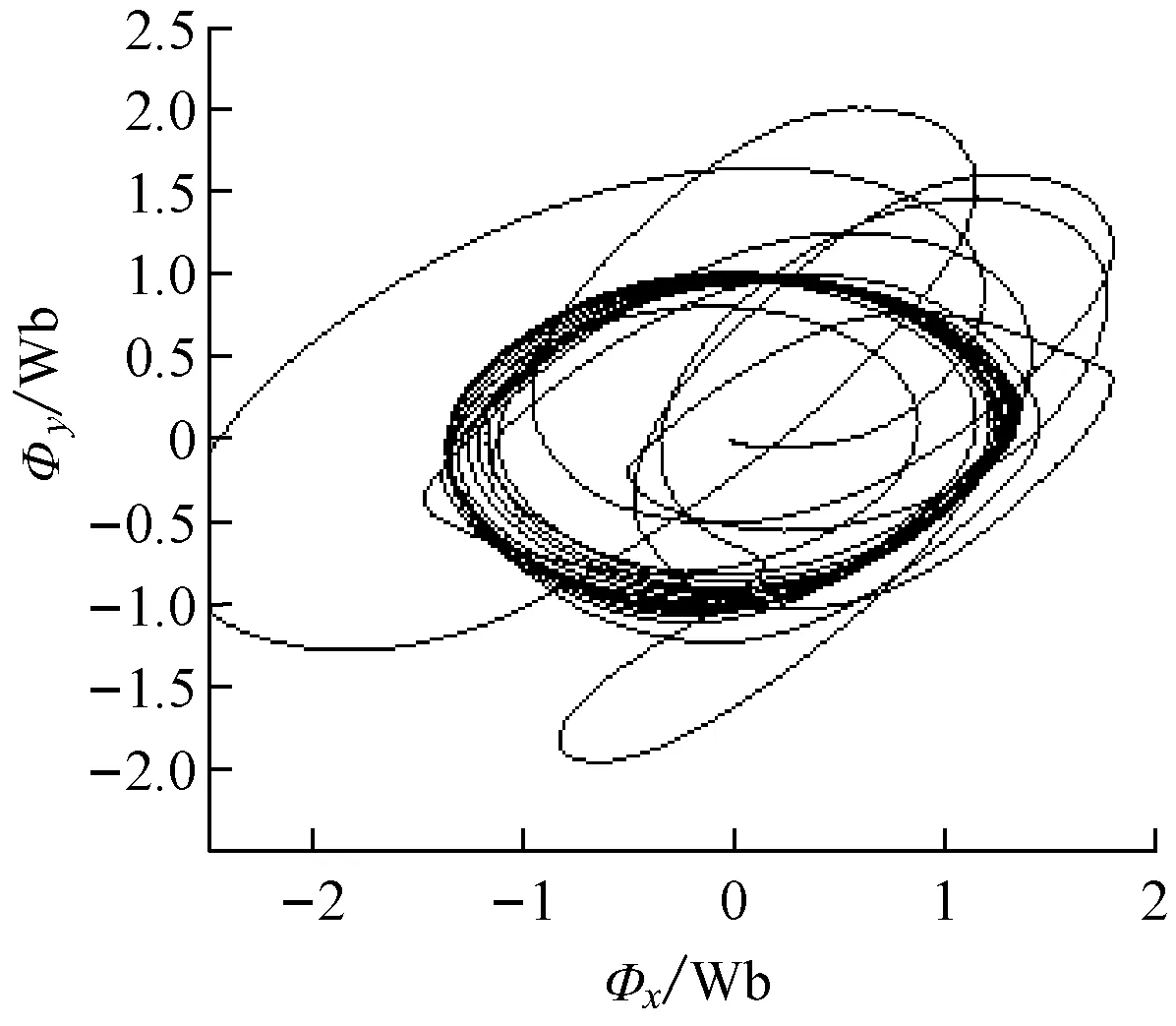
e) 定子磁链
通过比较图2和图3可知:五相运行时电流波形为标准的正弦波,而四相运行时波形有些畸变,导致的结果是定子磁链呈现椭圆形,且启动阶段经过较长时间后波形才变为正常形状,而正常运行时除了在启动阶段会有大的启动电流、波形不是太规则以外,其他时间都是标准的圆形。五相电机四相运行时转矩和转速的脉动都比较大,会使系统运行不稳定、振动超出限制等,因而已不能满足船舶电力推进的正常需要。
3 电机容错运行调制策略优化
3.1调制策略优化方法
电力推进系统通常会自带故障诊断系统来判断发生了哪些故障,并进行自处理。例如当检测到五相电机中c相不能正常工作时,通过调整剩下四相(a,b,d,e)的调制电压波形来降低缺相对系统性能的影响。根据基波磁动势的计算公式,当考虑调制方法时,激磁作用电流的大小和相位是调制的关键[7]。
理论上调制策略可以有多种,但是考虑到可行性、合理性和经济性等,通常有以下2种较为理想的调制策略:
1) 在保证气隙磁动势不变的情况下,仍保持每相激磁电流幅值相等;同时,为保证损耗最低,还需使电流幅值最小,归结为带约束条件的非线性规划问题,通过迭代优化求解。
2) 根据矢量特点,平面内任何1个矢量都可由平面内不平行的2个矢量合成。根据该原理,在某相缺失后,其激磁电流产生的气隙磁动势缺失,若保持其他激磁电流不变并向其余两相或两相以上绕组中注入额外的激磁电流,则这些额外的激磁电流产生的合成气隙磁动势就有可能弥补一相或多相气隙磁动势的缺失,从而达到电机合成气隙磁动势不变的目的。
此外,还可通过添加约束条件来消除激磁电流产生的特定次数谐波磁势。
对于上述五相电机,若c相发生故障,避开此相剩余四相可正常工作。剩余四相激磁电流意味着有包括4个幅值和4个相角在内的8个变量可发生改变。通常采用的传统分析方法是对称分量法,由于电机在缺相情况下其绕组分布不对称、定子漏感等参数会发生变化,因此传统的分析方法无法综合考虑使用,调制精度会大受影响。基于非线性规划理论,将对激磁作用电流的调制转化为纯数学的非线性规划求解问题,利用数学计算的方法来提高计算精度。非线性规划实际上是求多次元函数在线性和非线性等式或不等式约束条件下的极值,是对目标的优化过程。
3.2数学求解实现
利用非线性规划解决电机缺相调制问题时,需要确定约束条件(已知必须遵守的前提条件)和目标函数(将已知条件利用起来,去求解未知量的函数关系式)。只要改变约束条件和目标函数,以上两种调制策略实质一样,仅约束条件(边界条件)有一定差异。由于在使用过程中通常策略1中的参数更多、灵活性更大、调整范围更广,因而其应用更加广泛。同时,由于通常使用的逆变器是二极管箝位型拓扑结构逆变器,因此策略2中电流的不平衡会导致中点电位不平衡加剧。因此,这里主要介绍策略1的应用。策略1具有较多优点,但也有边界条件多、计算较复杂的不足,可借助计算机,通过在MATLAB中用fmincon函数(低版本为constr)辅助计算来简化计算过程。
假设c相开路,则剩余各相的电流可表示为
(7)
根据合成基波磁动势相等原则,可得
(8)
联立式(7)和式(8),可得
(9)
此外,还要维持各相电流幅值相等,即
(10)
根据电机基本原理,要求损耗最小,即在各相电流幅值最小的情况下使定子磁链保持不变,因此目标函数可概括为
(11)
由式(8)~式(11)可知,共有8个未知数、4个线性等式、3个非线性等式及1个目标函数,即在7个等式成立的条件下求得目标函数g的最小值,理论上可求出最优解,通过调用MATLAB中的fmincon函数可求得结果为:x1=1.250 0;x2=-0.406 1;x3=-0.000 0;x4=1.314 3;x5=-1.250 0;x6=-0.406 1;x7=0.772 5;x8=-1.063 3;g=1.727 5。
将以上参数代入各相电流中,可表示成式(12)的形式;矢量图可表示为图4。
(12)
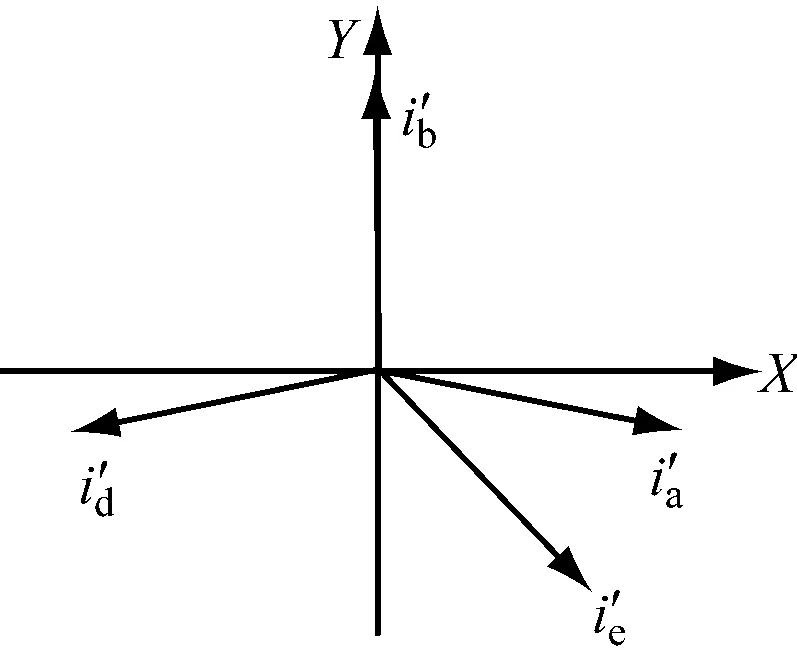
图4 优化电流矢量图
4 优化控制策略运行结果分析
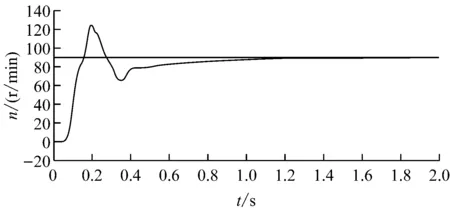
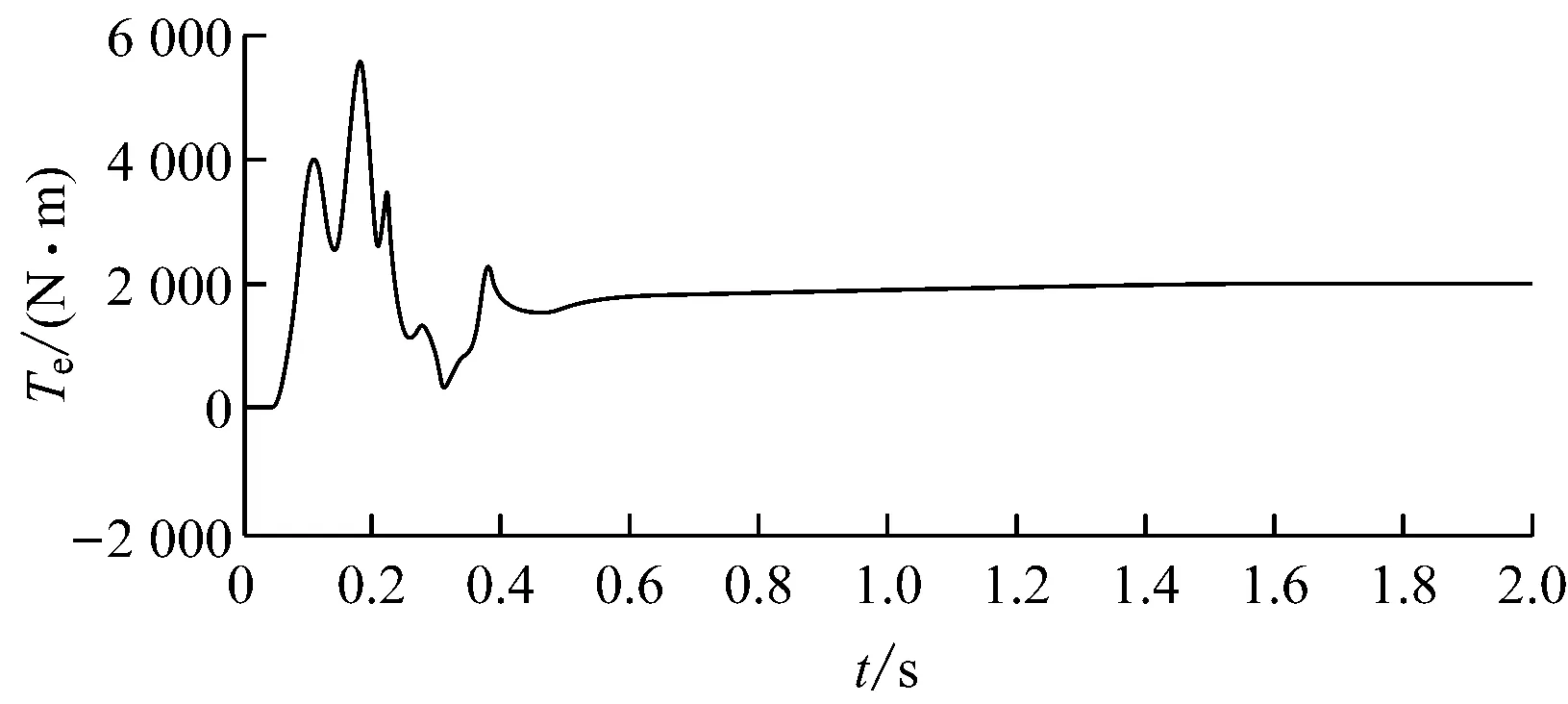
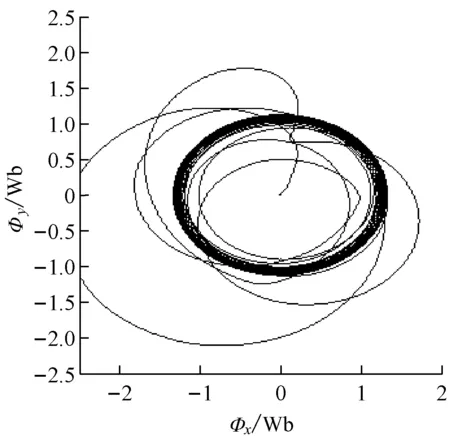
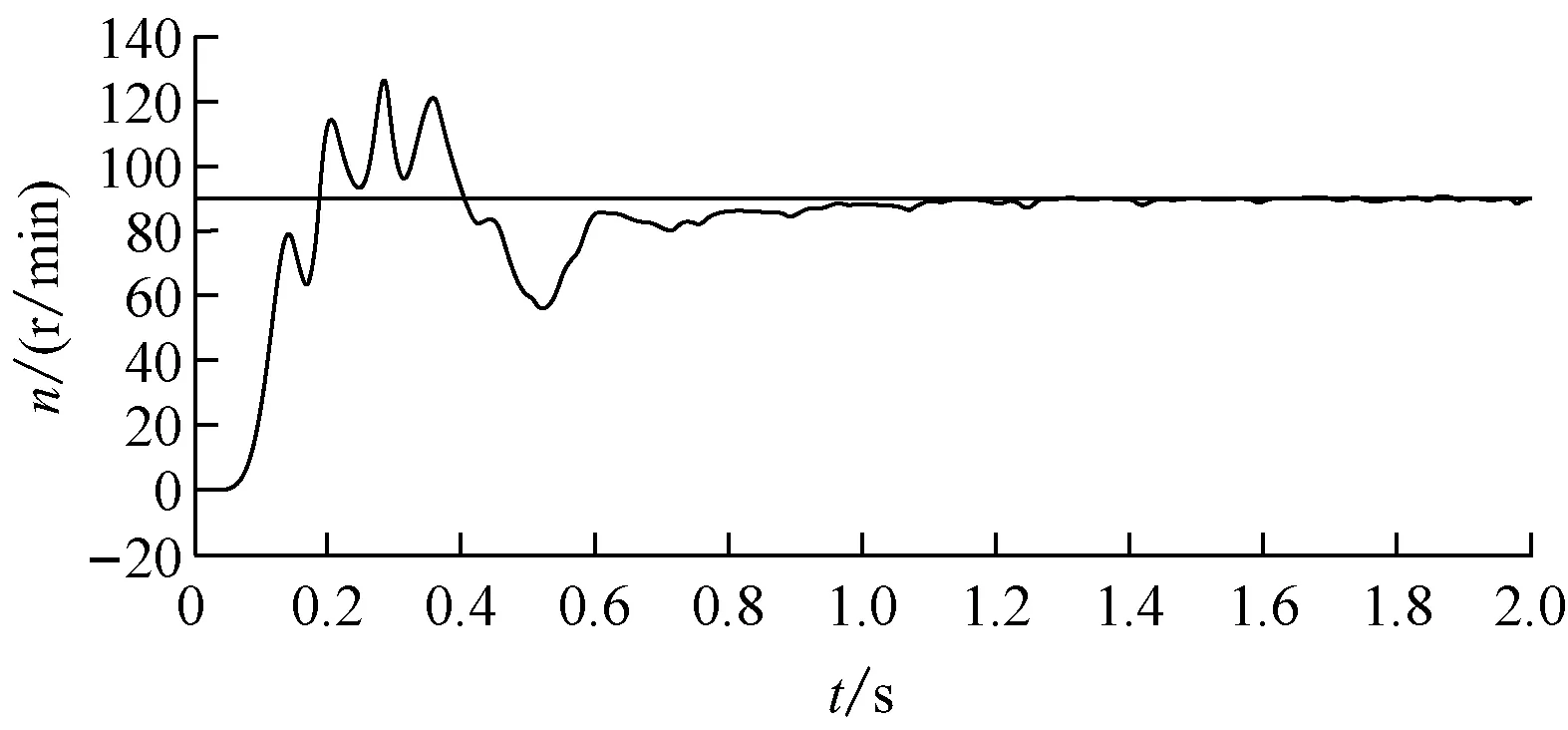
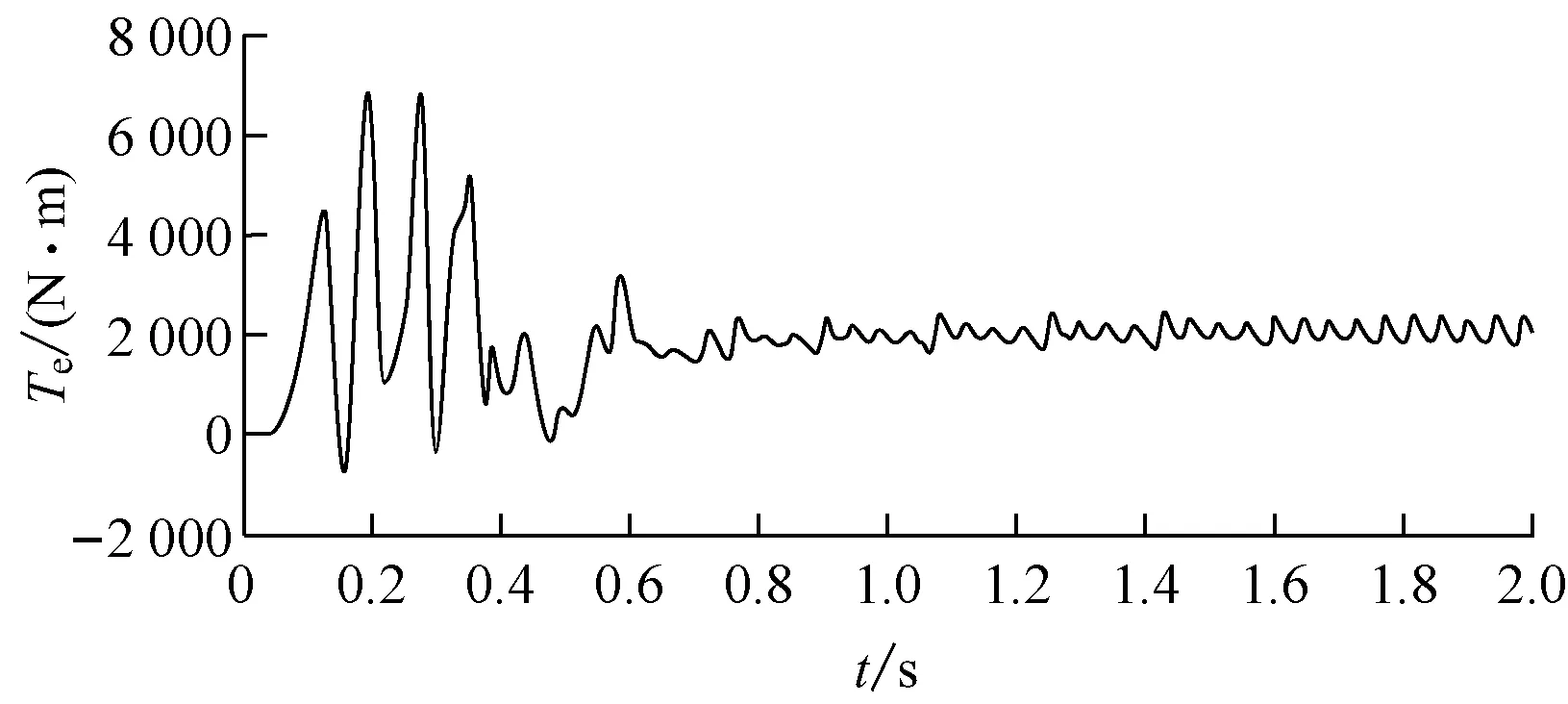
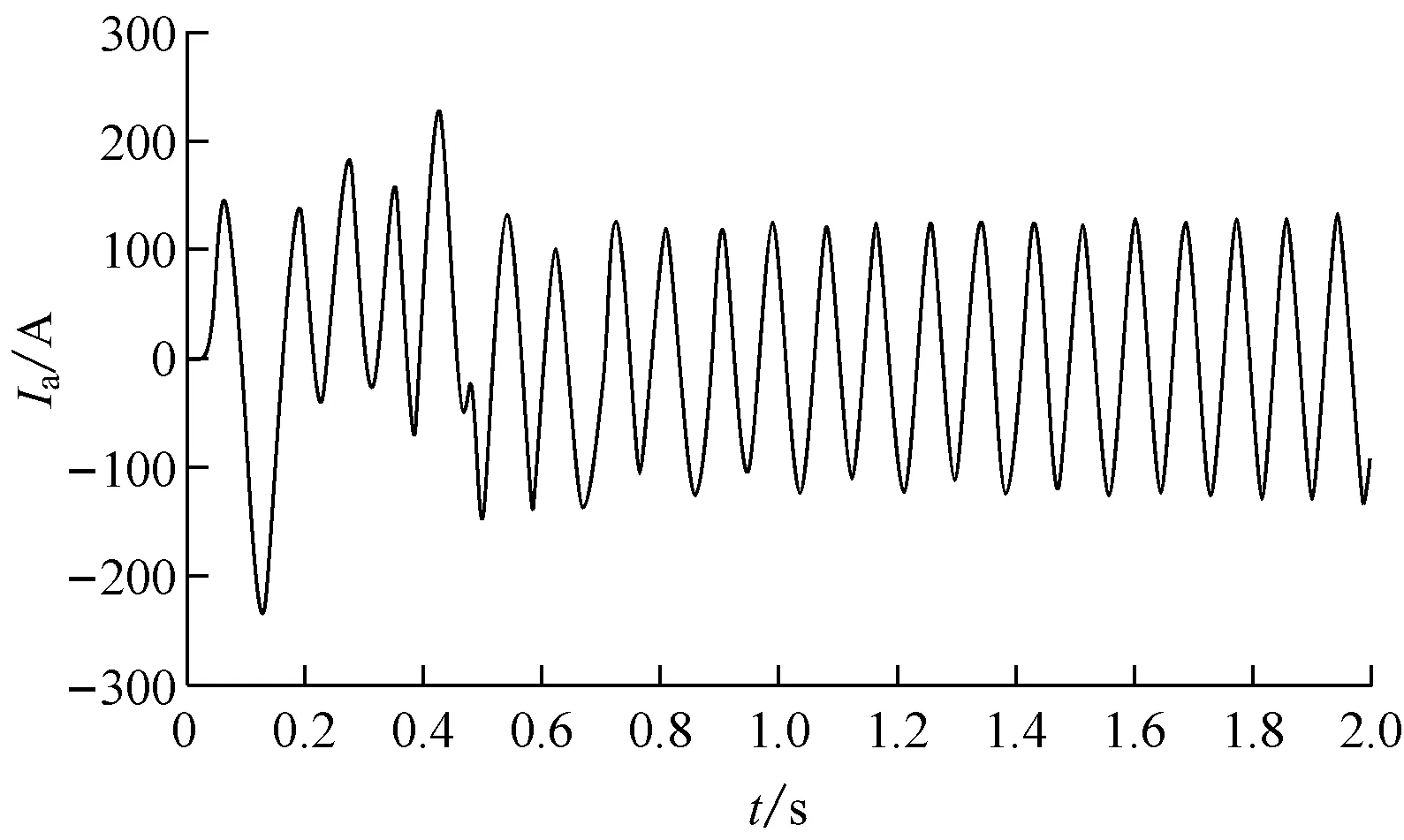
将根据以上调制策略计算出的各相电流代入Simulink仿真系统模块中进行仿真分析。进行调制策略优化后的仿真结果见图5。
由图5可知:转速在启动阶段会有一个超调,然后下降到给定转速以下并通过系统的调节慢慢跟随给定转速,达到给定转速后平稳运行,转速脉动很小;启动阶段会有很大的启动转矩,调节系统尽快达到给定转速后转矩趋向于平稳,整个运行过程中转矩脉动很小;电流波形近似正弦波,定子磁链波形也比较接近于圆形,完全符合船舶电力推进的需求。
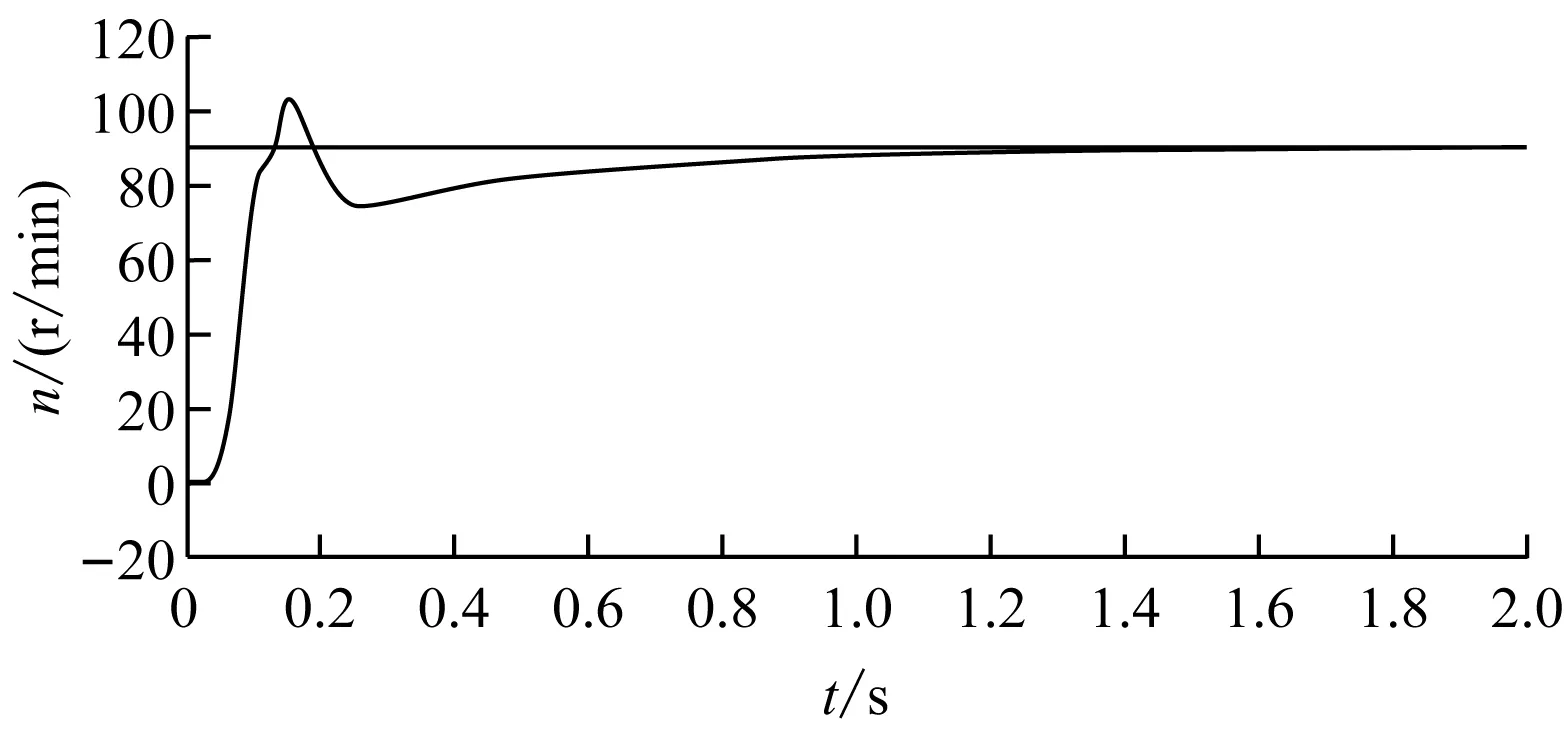
a) 转速波形
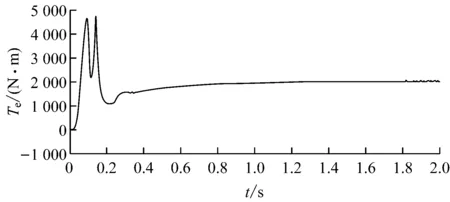
b) 转矩波形
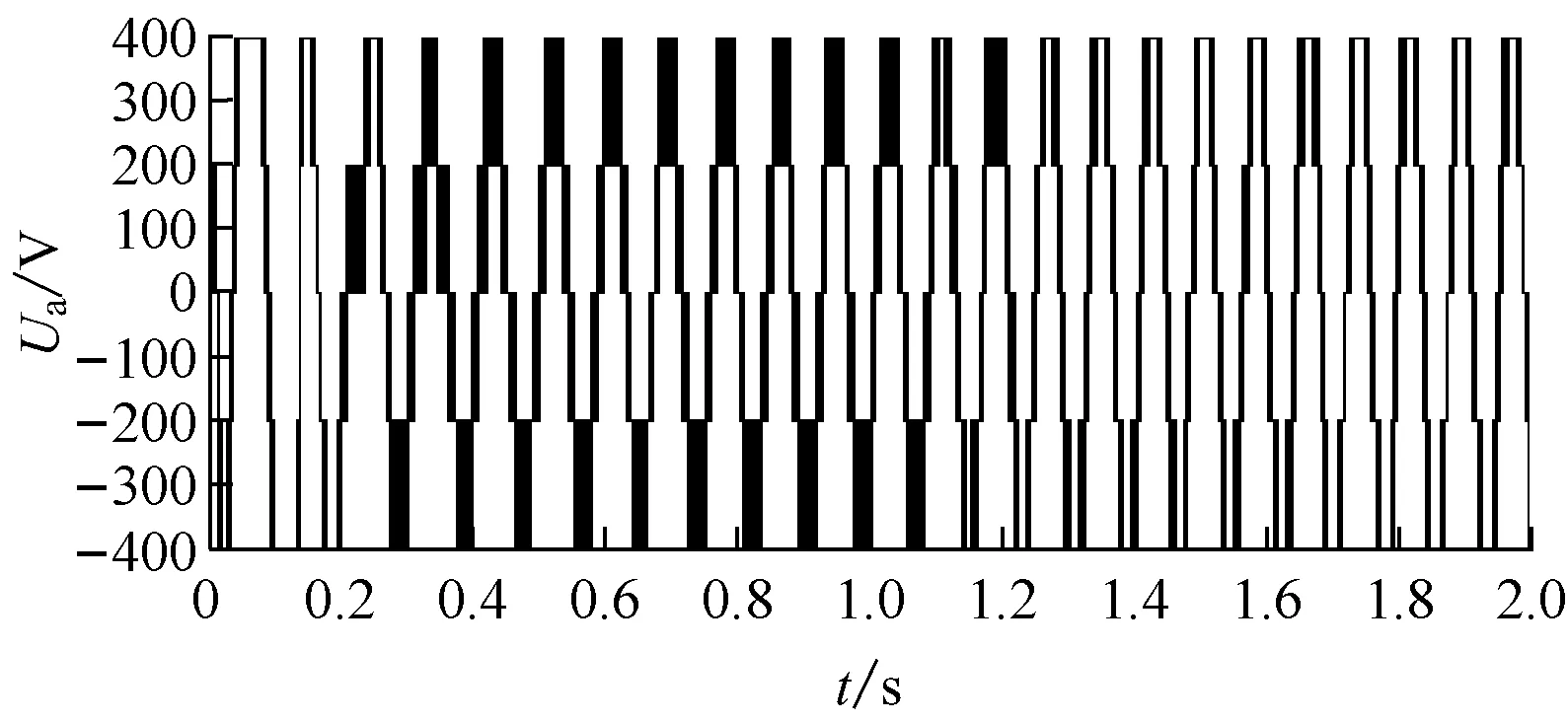
c) 调制电压波形
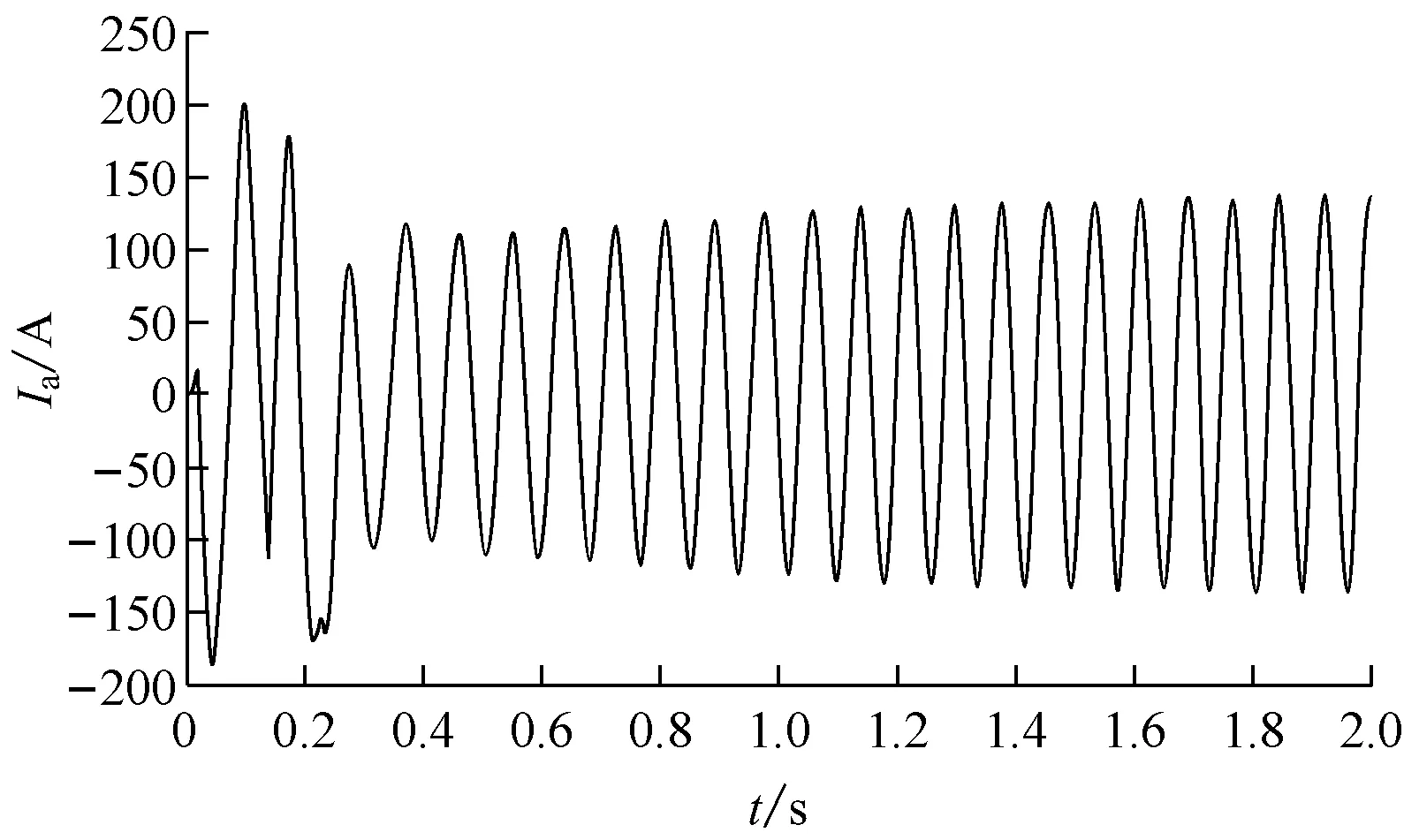
d) 电流波形
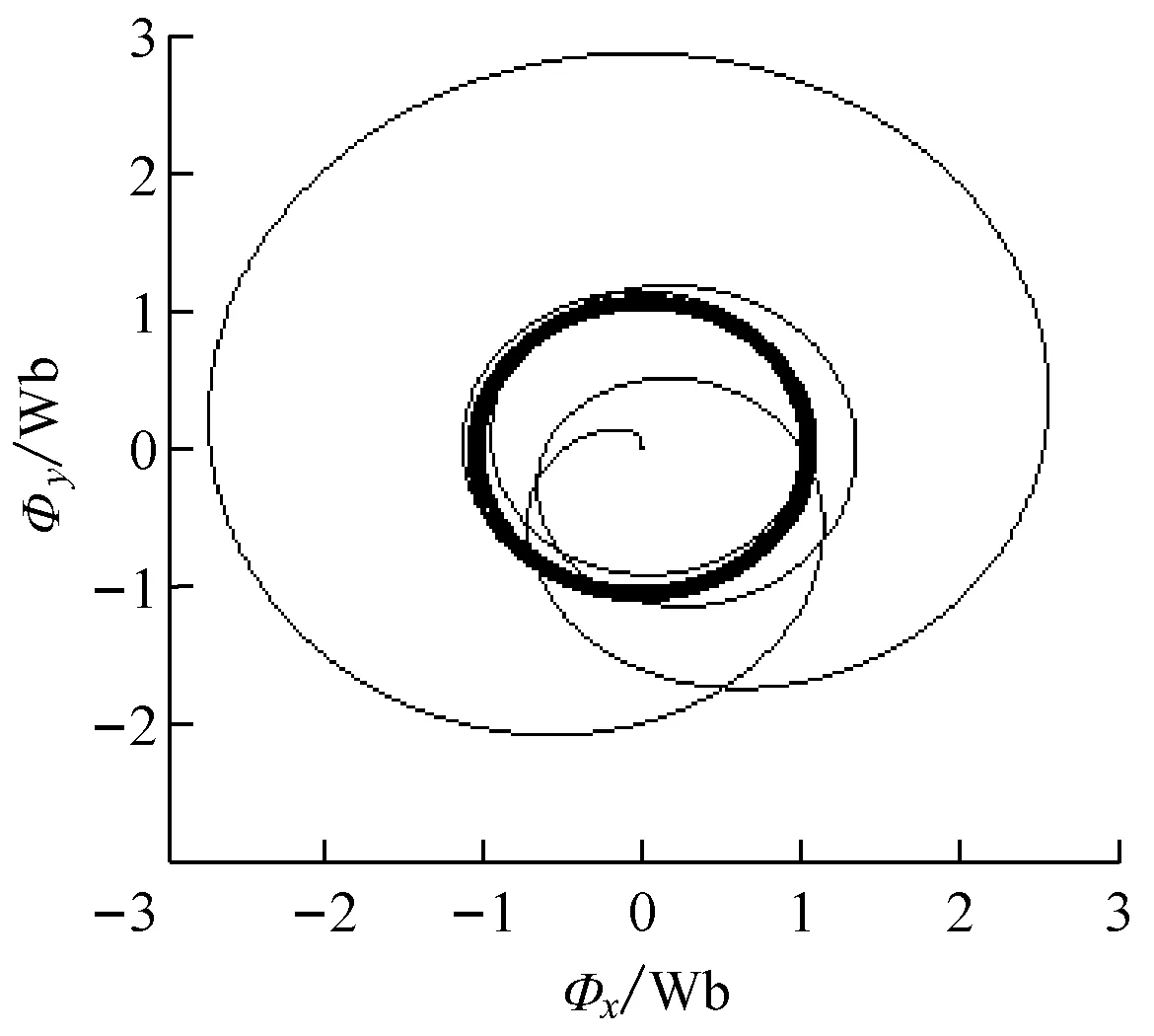
e) 定子磁链波形
同理,可根据以上原理模拟当一组中有两相出现故障时的优化控制方法。缺两相的情况相对复杂,同时缺两相会有失去相间的两相和失去相邻的两相两种情况,可判断的是失去的两相分布越集中就越破坏结构的对称性,对系统的性能影响越大。由于分析方法相同,只是要考虑相应的组合方式和达到相同磁动势所需要的各相电流,因此该情况的具体分析过程这里不作具体讨论。
5 结 语
当电机绕组缺失一相时,完全可以通过改变其它相绕组的激磁电流和相位来实现基波合成磁动势不变。根据计算结果进行优化调制,提高了缺相工况下的稳定性和带负载的能力,工作性能与电机正常五相工作时的性能相差不大,进一步提高了五相电机的可靠性和适应性。
[1]侯立军.多相电机变频调速研究[D].西安:西安交通大学,2006.
[2]WHITE D C, WOODSON H H. Electromechanical energy conversion[M]. New York: Wiley, 1959.
[3]ZHAO Y, LIPO T A. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space Decomposition[J].IEEE Trans.on Industry Applications,1995,31(5):1100-1109.
[4]朱军.五相异步电机变频调速系统控制方法研究[D].武汉:华中科技大学,2006.
[5]TOLBERT L M,HABETLER T G. Novel Multilevel Inverter Carrier-Based PWM Method[J].IEEE Transactions on Industry Application, 1999, 35(5): 1098-1106.
[6]隗宇,张欢仁,李勇.基于三电平逆变器直接转矩控制的开关矢量优化[J].上海船舶运输科学研究所学报,2014,37(4):7-12.
[7]孔武斌,黄进,康敏,等.多相电机非正弦供电下的定子缺相容错控制[J].电机与控制学报,2013,17(5):9-14.
[8]宋庆国,张晓锋,于飞,等.五相三电平逆变器空间矢量PWM控制研究[J].武汉理工大学学报:交通科学与工程版,2006,30(5):796-799.
[9]周昌鸿,曹建明,杜军.三电平逆变器中点电压控制新方法[J].上海船舶运输科学研究所学报,2010,33(2):145-151.
[10]朱鹏,乔鸣忠,张晓锋,等.基于五相三电平H桥逆变器的载波PWM控制[J].船电技术,2008,28(5):262-265.
[11]乔鸣忠,于飞,张晓锋.船舶电力推进技术[M].北京:机械工业出版社,2013.
Optimizing the Operation of Five-Phase Propulsion Motor in Missing Phase State
WEI Yu,XU Tao
(StateKeyLaboratoryofNavigationandSafetyTechnology,ShanghaiShip&ShippingResearchInstitute,Shanghai200135,China)
When the five-phase asynchronous motor in a marine propulsion system looses one phase, modulating its exciting current will ensure that no obvious change occurs on air flux. The optimized modulation is resolved by means of the nonlinear programming. Matlab simulation proves that the optimization method gives accurate results and Fault tolerance of the propulsion system is significantly improved.
five-phase motor; exciting current; fault-tolerant; nonlinear programming
2015-10-23
隗宇(1989—),男,湖北荆州人,硕士,从事船舶自动化研究。
1674-5949(2016)01-029-06
U664.14; TM343
A
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年2期)2022-04-26
防爆电机(2021年6期)2022-01-17
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电机与控制学报(2018年9期)2018-05-14
电子制作(2017年1期)2017-05-17
中国新技术新产品(2014年4期)2014-01-24
