
航空气象要素以及基于数值模式的低能见度和雾的预报
2016-09-06 01:24周斌斌
周斌斌 蒋 乐 杜 钧
(1 I. M. Systems Group公司,美国;2 美国国家海洋和大气管理局,美国)
航空气象要素以及基于数值模式的低能见度和雾的预报
周斌斌1,2蒋乐1杜钧2
(1 I. M. Systems Group公司,美国;2 美国国家海洋和大气管理局,美国)
简述了对航空运输有危害的天气要素,包括航线要素和航站要素的业务预报。着重介绍了在美国国家环境预报中心(National Centers for Environmental Prediction,NCEP)业务模式后处理中,能见度的两种诊断方法和雾的三种后处理再诊断方法。能见度计算的第一种方法是Stoelinga-Warner方法。该方法要求预报模式有四种水溶性物质的输出。通过这些水凝性物质计算消光系数来估算水平能见度。第二种方法是第一种方法的改进,包括增加了更多的水凝性物质,用相对湿度估算高湿度时或霾条件下的能见度,考虑了白天和夜间能见度的不同等。还讨论了以机场跑道为背景的跑道能见度的估计方法。雾的再诊断包括美国联合包裹速递服务公司(United Parcel Service,UPS)的方法,NCEP的多重规则法和根据雾内各物理过程间的平衡进行诊断的方法。UPS法根据低层大气稳定指数,多重规则法则根据模式输出的能见度、云、相对湿度和风速来诊断雾的发生,但两者均不能判断雾的强弱。物理过程平衡法是根据Zhou-Ferrier的雾层平衡理论所提出的雾发生及稳定时湍流强度小于某临界值的必要条件以及雾层内含水量的垂直分布公式对雾含水量及能见度进行诊断。后两种方法已被试验性地用于NCEP的短期集合预报中。预报验证表明,后处理中雾的再诊断方法可以有效地提高业务模式雾的预报能力。但总体而言,雾的预报与其他常规要素的预报相比,现仍处于较低的水平。最后讨论了模式对能见度和雾预报能力低下的原因和改善的途径。
航空气象,数值预报,模式后处理诊断,能见度,雾
0 引言
和普通气象预报相比,现代民用航空对重要(即对空运有影响的)天气预报有更高的实时性与准确性的要求。民用航空由机场、航空公司和空中交通管制(空管)组成。在这样一个讲究安全与效率的实时繁忙的系统中,许多在普通气象中不十分重要的天气现象也会对民航运营产生重大影响,甚至造成大面积的航班延误,导致非常大的直接与间接经济损失。以美国为例,过去10年中有65%~70%的航班延误都直接与天气有关①来源:美国交通部交通统计局2004—2013年统计结果。。而在所有因天气造成的航班延误中,24%是因为雷雨,17%因为能见度,14%因为风,14%因为低云,9%因为雪,8%因为冻雨,7%因为积冰,7%因为颠簸。如果将低云和能见度放在一起,其影响占整个天气对航班正点率影响的31%[1]。在所有天气要素当中,由低云和低能见度造成的航空事故伤亡率占最大的比例[2];而每年由雾造成的航运经济损失比龙卷风还要高[3]。
现代商业民用机场,特别是符合国际民航组织(International Civil Aviation Organization,ICAO)规范的大中型机场,大都配备了自动天气观测系统(AWOS)和跑道视程系统(Runway Visual Range,RVR),(有些机场还配有专业的人工观测人员),能够对云量、云高和跑道能见度进行实时观测。提供及时的临近预报与预警。但是这些观测系统,不能对较长时效的预报(如两小时以上到两三天的预报)提供可靠的指导作用。所以当今发达国家的业务预报,是以数值天气预报和数值预报模式后处理产品为基础的业务天气预报。这和许多发展中国家的基本依赖于人工的以天气图为基础的经验加外推式的预报有着巨大的质的区别。尤其对于民用航空运营,需要机场,航空公司和空管以分钟和小时来动态地把握天气信息,以合理计划与调整在有限空域中航班的空中流量与机场起降。所以重要天气预报的实时化(包括实时快速更新)、准确化和定量化极其重要。这种民航空运业务的要求,已经超过了人工定性经验加外推式预报的极限。自2000年以来,中国民用航空快速发展,但是随着航班量的增大,相对落后的航空气象预报能力成为民用航空进一步发展的巨大制约。本文的讨论,将在基于数值天气预报业务的框架中进行,将综合介绍与航空气象预报有关的重要要素预报,并着重介绍地面大气能见度和雾在NCEP业务模式预报中的诊断方法。
1 航空气象要素预报简介
考虑到航空气象要素的特殊性,航空气象要素预报产品主要从预报模式的一些通用模式输出量再进行特殊的后处理来产生,这样做的优点是不需要有专门的航空气象预报模式。从其对航运的影响,可分为航路天气要素和航站(机场终端)天气要素预报(Terminal Aerodrome Forecast,TAF)[4]。 从气象要素预报的时效来看,航空气象在很大程度上更加关心的是临近预报(即实时到两小时以内)和短期预报(如2~18h,或到两三天以内),并且强调及时的预报更新,如已经由ICAO附件三规范的大范围航路重要天气预报(Signification Weather Chart),时效6~12h,每6h更新一次;机场(终端区)天气预报时效有6,12和24h,每3~6h更新一次。在美国,目前这些指导预报(Forecast Guidance)是从NCEP的北美中尺度模式(North America Mesoscale,NAM)[5], 快速更新模式(Rapid Refresh,RAP)[6],以及2014年刚刚业务化的高分辨率快速更新模式(High Resolution Rapid Refresh,HRRR)[7]以及短期集合预报系统(Short Range Ensemble Forecast,SREF)[8]和用时间滞后技术建立的北美快速更新集合预报(Time-Lagged North America Rapid Refresh Ensemble,NARRETL)[9]中产生。预报员在这些指导预报的基础上再加工出最终的预报产品,使预报业务的效率大大提高。
1.1航路天气要素及其预报
航路天气要素指在巡航飞行过程中对飞行器产生有害影响的天气要素,包括对流、雷暴、结冰、湍流(颠簸)和飞行约束分类等。在飞行航路控制和航运管理上,美国联邦航空管理局(Federal Aviation Administration,FAA)和ICAO都规定飞行员在飞行之前必须了解航路上有害天气状况,必要时对飞行路线做适当调整来绕过重要天气区域或高度,提高飞行的安全性。
对流和雷暴对飞行的影响包括强上下垂直气流和闪电。在业务预报中通常由对流云和对流性降水的位置和强度来表示。目前由于天气雷达的广泛应用,业务模式也可产生模拟的雷达回波强度以及反映对流云高度的回波云顶高度的区域预报。模拟的雷达反射回波强度(单位:dBz)的计算可根据雨滴谱和冰晶滴谱分布按Rayleigh散射计算的格点回波强度,加上地面降水量估计的对流回波强度[10]。回波顶高的估算方法可从地面对流回波强度向上升到0℃高度,再从此高度上升到回波衰减20dBz所达到的高度[11]。除了雷达回波强度的预报,根据NCEP的航空天气中心(Aviation Weather Center,AWC)Bright等的雷暴云物理参数(Cloud Physics Thunder Parameter,CPTP)方法,用模式的温度廓线、对流有效位能(CAPE)和地面降水对闪电和干闪电进行诊断预报[12]。对流和雷暴除了对航线飞行有影响外,对飞机起飞和降落也存在很大影响,所以也是航站天气关心的重要要素。
结冰是航路上常见的重要天气。通常发生在过冷环境中。当飞机进入到高空过冷环境以后,机身特别是机翼上将发生水汽的接触性凝结。如果时间长,机翼上的结冰过厚,将会影响飞机的飞行平衡。如果在过冷环境中本来存在大量的过冷大水滴,机翼的结冰过程更快和厚度更厚。另外,机头结冰还将影响飞行员的视线。尽管大型商用飞机都有除冰装置,但事前知道航路上的结冰条件天气,对飞行安全至关重要。结冰的预报是对飞行路线上各飞行高度的结冰条件进行预报。目前NCEP的结冰诊断预报有两种方法,一种是利用模式预报的温度、湿度和上升气流来诊断各飞行高度上的结冰条件, 其预报仍是“是”和“否”的简单预报[13]。NCEP的区域集合预报系统 SREF和NARRE-TL中的结冰预报就是采用该方法。另一种是采用NCAR发展的模糊逻辑(Fuzzy-Logic)预报方法[14]。其方法是将与结冰有关的温度、湿度、云量、云水等与结冰的可能性相联系,做成曲线,找出各种情况下的结冰可能性和结冰强度。AWC正是根据第二种方法从RAP模式产生每小时的结冰预报(Forecast Icing Product,FIP)和利用模糊逻辑加上雷达回波和飞行员报告作出每小时的当前结冰分析(Current Icing Product,CIP)。NCEP受ICAO委托在全球范围预报(World Area Forecast,WAF)中所做的全球结冰预报也是采用第二种方法[15]。
湍流的航空气象术语叫“颠簸”。航路上强烈的颠簸对飞机飞行形成严重威胁,是航路上航空预报的重要预报对象。颠簸的产生原因有很多,最常见的是由风垂直切变和气流变形引起的晴空湍流(clear air turbulence,CAT)所产生的颠簸。NCEP的全美颠簸单模式预报和短期集合预报采用的是Ellrod方法[16];英国气象局(UK Met Office)受ICAO委托在WAF中的全球颠簸预报采用的也是Ellrod方法[17]。该方法通过计算风场的切变和变形来诊断颠簸的弱、中和强三级强度。要注意的是该方法当初是在粗网格(100km)模式下发展的,其中的许多参数是在粗网格模式中调试的,运用于细网格模式时,对这些参数要进行调整。除了CAT,雷暴、重力波和过山气流等也会产生颠簸。NCAR最近发展了一种综合性的颠簸诊断方法(Graphical Turbulence Guidance, GTG)[18]。GTG不是用1种方法诊断湍流,而是用12种湍流诊断方法的权重集合。多种方法的权重集合可有效地提高诊断准确率和信心指标(可能性),大大降低漏报率。比如12种方法中有9种都诊断为强湍流,则其可能性为9/12=75%。在不久的将来,NCEP也准备用GTG方法来代替Ellrod方法。AWC已在RAP的后处理中应用GTG预报全美各高度航路上的颠簸强度。
NCEP还准备用模式输出制做航路上“危险或回避区域”的预报,主要是指被云覆盖的高山范围,比较云底相对海平面的高度与山地的海拔高度可得到。这一产品实质上同能见度同属一类。
1.2航站天气要素及其预报
航站天气要素包括那些对飞机起飞和降落有影响的天气[19],例如机场水平能见度、雾、降水、云底高度、飞行约束分类、低空风切变、暴雨、大雪和冻雨等(以机场特殊天气观测系统为手段的如低空风切变、跑道视程和跑道积冰等不包含在常规的机场天气预报TAF中)。 这些要素是航班延误的重要原因。准确和及时地预报这些要素可以有效地降低航班的延误率。但另一方面,这些航站天气要素,特别是那些与低能见度和云有关的要素,却是数值天气预报中可预报性较低的要素(正因如此,机场的特殊天气观测与预警系统在临近预报中发挥着关键的作用)。
需要指出的是,这里的 “云底高度”在航空气象上是指总云量大于50%时的云底高度[19]。而当总云量小于50%时,即使有云,也不考虑云底高度,作为晴空处理。原因是当云量小于50%时,飞行员可以透过破碎的云块向上可见蓝天和向下可见陆地。这时,云底高度对飞机起飞和降落没有影响。因此,云底高度的诊断预报同时包括了云底和总云量的诊断。对云底,不同模式的诊断方法与模式及其系统误差有关, 其中的诊断参数或阈值是通过与大量的实测资料和模式数据相比较和统计确定的。例如,在NCEP的NAM目前的版本中,判断云底的云含水量(液相+冰相)阈值取为0.01g/kg;当相对湿度大于98%时,要考虑雪的等量含水量,其阈值也取为0.01g/kg;诊断是从地面往上对模式各层云含水量搜索,第一次遇到大于阈值的高度即是云底。而在目前RAP模式的当前版本中,云底的云含水量阈值比NAM要小得多,为0.0001g/kg;另外还要对比对流云底、雪的垂直能见度和相对湿度大于95%的行星边界层(PBL)高度,最后在这4种高度中取最低高度作为云底。不论是云底还是总云量,目前基于数值模式的业务预报的可靠性都很低,原因是目前业务模式中采用的各种对流方案和微物理方案等还不够完善。
低空风切变按美国联邦气象手册定义为大气层最低2000ft①1ft≈0.3m,下同。内风的矢量垂直变化率[19]。它可以通过模式输出的水平经向和纬向风速廓线计算得到,如果在这2000ft高度内,变化达到或大于20节②1节≈0.5m/s,下同。,则报告地面有强风切变。飞行约束分类既是航路要素又是航站要素,它与水平能见度和云底高度两者都相关,用来规定在何种能见度和/或云底高度条件下起飞、降落和巡航时是否必须借助仪器的规定,共有LIFR(Low Instrument Flight Rules)、IFR(Instrument Flight Rules)、MVFR(Marginal Visual Flight Rules)和VFR(Visual Flight Rules)4类规定[19]。其中,在LIFR和IFR类别下,飞行必须由仪表来巡航飞行或导航起飞降落;在VFR类别下,允许飞行可由飞行员目视控制。需要指出的是,在非目视飞行规则下,两架民航飞机之间的最小间距至少要(比在可目视飞行时)增加一倍或以上,以避免飞机过于接近从而威胁飞行安全。飞行约束分类的具体判断方法各国可能有不同的规定,但差别不大。四类飞行约束分类的判断如表1所示。

表1 四类飞行约束分类标准Table 1 Definition of the four flight restriction categories
如果业务模式有云底高度和水平能见度的诊断预报,飞行约束类型则可被相应地诊断出来。目前NCEP是利用RAP模式对全美2000多个机场进行每小时更新的飞行约束分类进行预报。而利用NAM模式,有每日四次全美格点的飞行约束分类预报,作为航路飞行约束分类的参考。当前还没有全球范围的飞行约束分类预报,所以应建议ICAO在全球范围预报WAF航空预报中增加飞行约束分类的预报。
2 低能见度和雾的预报方法
据对近年来NCEP的低能见度单模式的区域预报统计[20],其表征预报能力的“相当能力评分”(Equitable Threat Score,ETS)在低能见度段(<1000m)和雾条件下,只有5% 左右,大大低于同样模式的降水预报评分(≈35%)(见图1)。可见,提高低能见度的预报还有很大的提升空间。值得注意的是,图1是5年前的结果,近年来,NCEP正致力于模式的改善与更新,能见度的预报水平也有相应提高,特别是原有的RUC模式被新的RAP所替代,其水平分辨率没有变,但低能见度预报的ETS可到达10%以上[21]。低能见度及雾在模式中的可预报性很低的原因有很多,除了雾的复杂性和目前对雾的机理了解不够外,最重要的原因可能是业务模式只是针对普通气象要素预报进行设计的,所有与云有关的参数化方案都是为非地面云和降水进行开发和调试的。对地面雾,其中的参数调试很少或根本没有经过雾条件下的调试。比如水滴谱,采用的是高层测试的云滴谱和地面的雨滴谱,而不是与雾有关的雾滴谱。滴谱的不同,将影响到水滴的沉降和在雾层中辐射的传输计算;雾中的微物理过程与高层云也不同。所以遇到地面雾时,用云水量来表征雾的地面含水量会有很大的误差,甚至地面完全产生不了雾的含水量。另外,雾本身是地面边界层内阈值天气现象,只有当湿度大于某个阈值以及风速或者湍流小于某个阈值时,雾才会发生。所以雾的数值预报对模式本身的质量和对预报的初值和边界条件(包括地表条件)的准确性要求极高。而这两方面目前都不尽人意,所以雾作为模式直接输出的指导预报的条件还不成熟。除了能见度是NCEP的模式指导预报外,雾现在还不是模式指导预报的正式内容。目前,全美各气象台站和机场,主要还是利用NCEP的能见度预报,结合其他要素场的预报以及当地的具体情况对雾进行经验预报。但经验预报含有预报员的主观性,依赖于预报员对各模式的了解和过去模式表现及偏差的长期经验。因此当模式更新时,预报员对模式的状况和偏差的理解也要及时更新。但现在业务模式的更新愈来愈频繁,如NCEP的模式通常每年更新一次。这使得预报员的经验预报往往跟不上快速发展的业务模式的更新。因此,由模式直接进行雾的预报就显得更为迫切,这也是目前要求将雾试验性地加入NCEP的模式指导预报的动力之一。
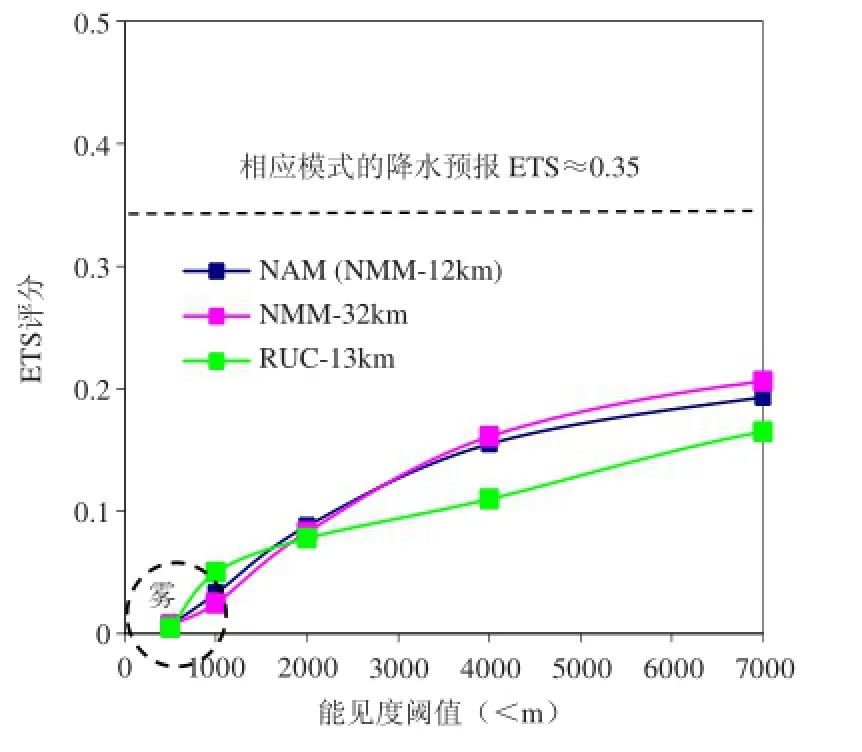
图1 三种模式(NAM,NMM和RUC)整个北美地区能见度预报的验证评分(验证时间2009年11月23日—2010年4月20日)Fig.1 Visibility prediction verification scores for 3 models(NAM, NMM and RUC) over Continental U.S. from 23 November 2009 to 20 April 2010
2.1水平能见度的预报
地面水平能见度除了与雾有关外,还与其他天气要素例如降水和降雪等有关,所以地面水平能见度的业务预报包括的天气比雾要广泛。目前NCEP的区域业务模式后处理中有两种地面水平能见度的估算方法:1)Stoelinga等1999年(SW99)发展的方法[22],NAM以前所用的老模式ARW_NMM和目前所用的新模式NEMS-NMMB(Nonhydrostatic Multiscale Model on B-grid )用的是这种方法。2)NOAA ESRL/GSD(NOAA-Earth System Research Lab/ Global System Division)方法[23],GSD方法是对SW99方法的改进,即考虑了更多的水凝性物质,还考虑了高湿度和霾在风切变下的影响;最近,还将夜间能见度计算做了调整,与白天分开计算,并考虑了太阳天顶角的影响。目前,NCEP 的业务模式系统RAP和HRRR中的模式WRF_ARW[24]使用的是GSD方法。SW99和GSD方法对模式的微物理参数化方案有特殊要求。SW99要求模式能输出4种水凝性物质的含水量:地面云或雾含水量、雨水含水量、冰晶(冰雾)含水量和雪花含水量。GSD方法再增加了小雪粒子(Graupel)的影响。水凝性物质对能见度的影响反映在它们对可见光的削弱及消光系数β的影响。水凝性物质的含水量C(单位:g/kg)与消光系数β(单位:km-1)的关系可表示为

各种水凝性物质的系数a,b列于表2。

表2 各种水凝性物质的系数a和bTable 2 Values of coefficients a and b for various hydrometeors
具体做法是在模式的格点上,检查是否存在这些水凝性物质,如果有,则根据其含量计算消光系数β,再根据Kunkle公式

计算水平能见度(Vis,单位:km)。从表2可以看出,雾和冰晶具有较大的消光系数。因为它们粒子小,数量大,具有较大面积—体积比。如果格点含有多种水凝性物质,则先分别计算它们的消光系数,然后将它们相加得到总的消光系数,再用总消光系数来计算水平能见度。如果格点上不含这些物质的任何一种,则认为是透明大气,在模式中通常定义一个很大的值,如NCEP模式中定为20km。SW99的水平能见度计算没有考虑气溶胶和霾的影响。霾是由大气中没有完全核化的气溶胶细粒子造成的,在重污染地区,对能见度降低有明显作用。通常霾天气条件下,能见度可降到1~2km或更低。霾污染目前在中国大陆的一些城市相当严重,对能见度及飞行航运的影响也很大,相关研究也很多。但霾的数值业务预报不论在国内还是国外都没有进展。要准确预报霾及其对能见度的影响,业务模式必须要有一套较好的,既包括物理过程也包括化学过程(二次转化)的气溶胶颗粒物的预报方案,还要有较精细的气溶胶颗粒物的初始条件和资料同化方案。目前这两方面在NCEP和其他业务中心都不具备条件。英国气象局开发了一种在业务模式中考虑气溶胶对能见度影响的计算方案[25]。但气溶胶在业务模式中还不是预报量,所以在该方案中,还是假设气溶胶的分布函数,利用参数化的气溶胶消光系数,通过相对湿度作为输入量来计算能见度。目前参数化的气溶胶消光系数还没有可靠的数据,还需要做大量的工作。在没有定量的气溶胶输出和可靠气溶胶消光系数的情况下,GSD方法则利用相对湿度(q)来估算能见度(Vis):

其中,q=min{80.0, (RH1/100-0.15 )},RH1是模式最低层相对湿度(单位:%)。在95%的相对湿度下,能见度在5km左右。该估算只适用于没有污染的大气如北美地区,对高污染地区并不适用。当有风切变(S)时,该能见度订正为:

S为模式近地面第一层和第四层之间(约15hPa)的水平风垂直切变,单位为m/s。
当考虑昼夜影响时,夜间能见度订正用Rasmussen等建议的方法[26]:

白天时,太阳天顶角因子(Z)对能见度的订正为:

表2中雾条件下的消光系数实际上采用的是Kunkel[27]的试验数据。按Kunkel参数计算的能见度(式(2))没有考虑雾滴谱和雾滴总数的影响。据Gultepe等[28]的研究,仅按含水量计算的能见度的不确定性可达50%以上。要减少不确定性,在计算中必须考虑雾滴谱的影响,但计算费用太大。为减少计算量,Gultepe等[28]提出了包含雾滴总数Nd(单位:cm-3)和含水量(C)的能见度估算公式:

式中,总粒子数(Nd)和含水量(C)的不确定性分别为30% 和15%,由此引起的能见度计算不确定性为29%,大大低于原来的50%[28]。但在目前的业务预报中,在其后处理中由于没有雾滴总数的输出,还是依照经典的Kunkel参数方法(式(2))。
在NCEP,目前用13km分辨率的RAP和12km分辨率的NAM模式分别进行每小时更新的18h和每天4次更新的84h各航站和全美各区域的能见度预报。同时,NCEP还利用高分辨率(4km)的NEMS_NMMB和WRF_ARW模式进行每天两次更新的36h北美区域能见度预报。自2014年起,NCEP把更高分辨率(3km)的每小时更新的基于WRF_ARW模式的HRRR系统投入业务。由此,各航站和预报台有了每小时更新的15h全美能见度高分辨率区域指导预报。由于低能见度天气和雾往往是小尺度的局地天气,水平高分辨率模式可以有效提高对低能见度的预报能力。此外,利用NCAR的技术,AWC已将各航站的每小时更新的TAF能见度预报(RAP预报)显示在AWC的Aviation Digital Data System(ADDS)网上[29]:http:// aviationweather.gov/taf。用户可利用ADDS网站查询各航站的当前能见度和18h能见度预报。
除了能见度的业务模式指导预报,NOAA的MDL(Meteorological Development Lab)还发展了对模式输出的统计预报,如MOS(Model Output Statistics)[30]和LAMP(Localized Aviation MOS Products)[31],这两种统计预报产品包含有对地面能见度的分级预报。MOS技术利用NCEP的全球业务模式GFS(Global Forecast System)和NAM等区域模式输出的基本量(如地面温、压、湿、风速和降水等)作为预报因子,观测到的地面能见度作为预报量,利用历史资料进行多元统计回归,用得到的回归公式对模式预报输出进行能见度预报。MOS能见度分为7个等级 :<1/2,1/2~1,1~2,2~3,3~5,6,>6mile。由于各种模式的预报误差特性不同,每一种模式的MOS回归公式也不同;同一种模式各版本也不同。模式每次更新,MOS公式要重新进行回归统计,这样需要进行动态的统计计算。MOS预报目前由MDL产生,共有1000多个台站。而LAMP是专门针对航空预报并局地化的GFS-MOS,它扩大到1600多个台站;此外,LAMP充分利用了最近时次的地面观测资料和全美雷达拼图(MOSAIC)资料;最后,除了回归方法,LAMP还利用每小时运行的小模块对区域资料进行处理。
以上介绍的是水平能见度(Horizontal Visual Range,HVR),其背景是天空。在飞机起飞降落时,飞行员看到的是前面下方的跑道。以跑道为背景的能见度叫跑道能见度(Runway Visual Range,RVR)。RVR与HVR的估算不同,它还包括了垂直的分量,要穿越更多的空气质量;但在数值上与HVR有关,可以用Taylor的RVR-HVR经验相关曲线来估算[32](图2)。
由图2可见,当HVR在1000m以下时,RVR比HVR略大;但大于1000m时,RVR比HVR要小。如在水平能见度为4000m时,飞行员只能看到2000m以内的跑道。

图2 RVR与HVR的经验关系Fig. 2 The empirical relationship between runway visibility range RVR and horizontal visibility range HVR
2.2雾的指导预报
雾对航运的影响是不言而喻的,雾的预报也是各个预报中心的挑战之一。目前雾还不是各普通天气预报中心模式指导预报的正式内容。原因是多方面的,其一是目前的业务模式中对各种雾的物理过程还缺乏合适的描述,在所有的微物理参数化方案中也没雾的微物理过程。其二,目前的业务模式的水平分辨率比较低,而地面雾往往是小尺度现象,很多局地的因子如局地气流和地形等的影响不能很好地反映在低分辨率的物理过程中。所以业务中心雾的数值预报精度还很低。尽管过去有很多雾模式的模拟研究,从一维到三维雾模式再到三维中尺度数值预报模式。但要将它们应用到预报中心的业务预报中还有很大的困难。业务预报中心不太可能用某一模式专门进行雾的预报,因为运行和维持费用太高。雾的业务数值预报只能从现有的普通数值预报模式中产生,在模式常规输出量的基础上再进行后处理来诊断雾,这样就可同其他天气要素预报共享一个相同的数值模式。
如前所述,尽管目前雾还不是各天气预报中心正式的的模式指导预报,但各台站和航站正积极的要求预报中心提供雾的试验性的模式指导预报。由于雾的数值预报精度低以及雾的经验预报中的缺点,预报员常利用能见度的指导预报来预报雾。但是低能见度在很多情况下并不仅是由雾造成的,其他天气如降水和降雪也会导致地面低能见度。另外低能见度本身的实际可预报性也很低,模式预报的系统性偏差如热偏差(即模式温度常高于实际温度)和干偏差(模式湿度常低于实际湿度)也往往造成业务模式没有可靠的,甚至没有雾含水量的输出。这些都造成在后处理中低能见度计算的困难。现在WRF-ARW模式常常被用于雾的数值研究,但ARW,即使是最新版本,仍有很大的干偏差。例如,NCEP业务运行的北美4km分辨率的最新版本的ARW和以ARW为基础的3km分辨率HRRR模式地面相对湿度预报在2014年7月—2015年1月与北美地面站资料的验证比较表明,HRRR在2014年具有较干的偏差,而ARW在2014年大部分时段,特别是11月以后和2015年1月都是干偏差。模式的干偏差给用模式直接输出的地面云含水量来预报雾带来很大的误差。比如美国空军气象局(Air Force Weather Agency,AFWA)的WRF雾预报研究表明[33],当地面大气处于所谓的近雾(Near-Fog)条件下,由于ARW模式的干偏差,不能产生足够量的雾滴;而雾滴的初始形成对雾的进一步发展有至关重要的影响。鉴于这些原因,目前NCEP并不采用模式直接输出的地面云含水量来判断雾,而是着重在模式的后处理中对雾进行再诊断,这样可以大大地提高对雾预报的准确率,甚至可以接近降水预报水平相当的程度[21,34]。本节将介绍最近发展的三种雾的诊断方法。
2.2.1雾的多重规则(Multi-Rules)诊断方法
该方法[34]利用模式输出的能见度或模式最底层的液态水含量(liquid water content,LWC)、云顶和云底高度、地面2m相对湿度和地面10m风速根据以下三条规则和阈值进行诊断。只要满足其中一条规则,就判断雾会发生:
含水量(能见度)规则:

或云高规则:

或相对湿度—风速规则:

其中“含水量规则”或“能见度规则”代表了雾的总体判断。1000m能见度是雾的定义,相当于用Kunkel方法(式(2))估计的含水量0.015g/kg。如果模式在某时某地(格点)没有温湿偏差,该条件下模式能很好地预报雾的发生。如果模式在某时某地有温湿偏差,能见度规则不确定,这时相对湿度—风速规则将起作用。对于干偏差模式来讲,相对湿度的阈值可以调到大大低于100%,也就是说,当模式的相对湿度不到100%就可以有雾发生。风速规则是考虑到地面大部分是辐射雾,静风是辐射雾形成的必要条件之一。如果模式有湿偏差,相对湿度的阈值可以取大一些,同时加大风速的阈值以减少误报率。所以,湿度和风速的阈值在不同模式中需要作些微调(参见文献[34]中举例)。相对湿度—风速规则是模式有干、湿偏差时对能见度规则的补偿。如果能见度规则和相对湿度—风速规则同时满足,雾的发生就更加确定了。云高规则是针对其他类型的雾而设立的,特别是平流雾、海雾、下沉雾和雨雾等。这些雾有较厚的厚度,但一般不高于400m。这些雾就由模式来判断,充分利用模式本身对层云的预报功能。如果模式中有层云,其底接地而其厚度低于400m,就判断为雾。云高规则的效果完全依赖于模式对低层云的预报能力。对该方法的长期统计表明,在地面,由能见度规则预报的雾占30%,由云规则预报的雾占20%,由相对湿度—风速规则预报的雾占50%。这样的比例大致反映了地面各种雾类型的比例。
对该方法预报雾的长期客观验证依赖于雾的观测资料。Zhou等利用2008年北京奥运会WMO的研究示范项目[35],对NCEP的短期集合系统中15km分辨率的基准模式WRF_NMM和WRF_ARW用能见度(含水量)预报的雾和用多重规则诊断的雾与华北、华东等13个城市的雾实况进行客观验证,为期7个月(2—8月)[34]。结果表明,用含水量预报,WRF_NMM和WRF_ARW的ETS均在6%左右,而用多重规则诊断,ETS可达20%。由图1可见,仅用能见度来预报雾,NAM和RUC的ETS分别为3.5%和5%,但如用多规则诊断方法,它们的ETS可分别增加到7%和6.5%。可见,多重规则诊断的雾预报比仅用含水量或能见度来预报,预报效果有明显提高。
2.2.2UPS雾诊断方法
UPS空运部门发展了一种用地面相对湿度和地面大气稳定度指数来诊断雾是否发生的方法[36]。地面大气稳定度指数定义如下:

式中,T1和Tsfc分别为模式输出的离地面第一层和2米处温度(单位:K),u为模式输出的离地面第一层风速(单位:节)。根据MRi的数值将大气稳定度分为三种状况。用Eta模式[37](早期NCEP NAM所采用的模式)数据时,三种状况的阈值分别为:
MRi≤0.025,表示大气处于充分混合状态。在70m以下湍流混合边界层遏制了冷却。没有雾会发生。如果近地面相对湿度达到饱和,只会有层云形成。
0.025<MRi<0.04,表示大气处于混合和静止状态的过渡区。如果近地面相对湿度达到饱和,雾有50%的可能性会发生。
MRi≥0.04,表示大气极稳定,地面层与高层分离,70m以下地面静止大气导致地面强烈的辐射冷却,如果近地面相对湿度达到饱和,雾一定发生。
要注意的是,以上三种状况下的MRi阈值是在Eta模式下调试得到的。如果采用其他模式,阈值需要重新调试才能确定。
2.2.3根据物理过程平衡的雾诊断
多重规则的雾诊断和UPS的雾诊断,都是诊断雾是否会发生,不能对雾的强弱进行诊断。为诊断雾强弱,根据2008年Zhou等(ZF08)提出的辐射雾的平衡理论[38],NCEP发展了一种在模式后处理中对各种雾物理过程之间平衡进行判断的雾诊断方法。ZF08用奇异摄动方法求解雾的含水量非线性方程表明,辐射雾是否形成、发展、稳定和消散由冷却率、湍流强度以及雾滴的重力沉降之间的平衡所决定。雾平衡稳定条件可以用所谓的“临界湍流交换系数”Kc来表示,并得到了雾层内的含水量垂直分布廓线的显式表达式。只有当实际大气的湍流交换系数K<Kc时,雾才可能形成和稳定(维持)。如果实际大气的湍流交换系数K>Kc,则雾的平衡被破坏,雾要么不形成,要么形成后很快消散。ZF08的研究对象是辐射雾,没有考虑平流。Zhou在ZF08的基础上进一步考虑了水汽平流的影响[39],并得到了包括水汽平流影响的临界湍流交换系数和雾内的含水量LWC垂直分布廓线的表达式:


式中,α为雾滴重力沉降系数,可取0.062,β(p,T)为与气压和温度有关的参数,通过Clausius-Clapeyron公式计算:

式中,Lv和Rv,分别为水汽潜热和气体常数,p为大气压, Es(T)是饱和水汽压,T为雾层平均温度,Co为冷却率(单位:℃/s,冷却为正,加热为负)。需要指出的是,这里的冷却率是模式输出的近地面总变温率预报,包含了由长短波辐射引起的冷却或加热,以及由温度平流和湍流混合引起的冷却或加热。其数值完全由预报模式决定。Q为水汽在水平方向上的平流。V为模式输出的地面风速(如10m)。Q为模式输出的地面总水分量,为液态LWC和水汽比湿q之和(Q=LWC+q)。当Adv>0为湿平流,当Adv<0时为干平流。z为离地面的垂直距离。H为雾层厚度。如果雾没有形成,可用地面饱和层厚度代替。如果模式有干偏差,大气饱和的定义在后处理中可以定义为相对湿度略小于100%的某一阈值,也就是说,即使模式没有雾的液态含水量的输出,在后处理中也可根据相对湿度小于100%来定义的饱和,通过上式,诊断出雾内含水量的垂直分布,这是本方法的特点之一。δ为与实际大气湍流交换系数K有关的参数,具有厚度的尺度。

根据ZF08的研究,δ可以认为是雾边界层,其值的大小(厚度)随雾内湍流强度变化而变化。当雾内湍流强度较弱时,δ较薄。当湍流很强时雾边界层δ将从地面向上发展。当δ大于雾层厚度时(δ>H),雾将消散。如果在雾形成之前,在饱和层定义的厚度下的δ如果很厚,雾也不会形成,最多是形成非接地的层云。只有当δ<H 时雾才会形成并稳定。所以,与临近湍流交换系数Kc一样,δ也可用来诊断雾是否形成和消散。含水量式(11)由两项组成:第一项是{ }的平方根项,它表征了含水量的总体大小和最大值,湿平流越强,冷却率越大,雾层越厚,含水量也越大。第二项是[ ]项,与z和δ或K有关,它决定了含水量以及其最大值的抛物线状垂直分布。含水量这种垂直方向的抛物线状分布与实际观测的形状很相似[38]:完全没有湍流时(K=0,δ=0),含水量最大值在地面(z=0);当湍流增强时,含水量最大值脱离地面;湍流越强,含水量最大值位置越高。
大量雾的数值模拟研究和观测都表明,湍流对雾的影响是双重的。一方面,只有当湍流强度很弱时(静风条件)雾才可能形成。另一方面,当雾形成后,适当的湍流可以促进雾的进一步发展。雾的相对湿度必要条件(即相对湿度必须达到饱和阈值)很好理解,但雾的湍流强度必要条件还很模糊。怎样定量地定义“适当”的湍流强度是长期以来悬而未解的问题。ZF08的临界湍流交换系数(Kc)给出了解决此问题的答案:只要湍流强度不超过由临界湍流交换系数Kc定义的强度,雾就可以稳定和发展,即Kc定义了雾层所能承受的最大湍流强度。从临界湍流交换系数Kc的表达式可以看出,雾能承受湍流的能力与近地面的湿平流和冷却率的1/2次方和雾厚度H3/2成正比。湿平流和冷却率越大,Kc越大,风速(或湍流)越小,雾越容易形成。雾越厚,Kc也越大,雾层能承受的湍流也越大,越不易被强湍流和气流吹散,雾也越稳定。由于Kc与H的3/2次方成正比,H对Kc的影响大于平流和冷却率的影响。对薄雾,局地气流的增大(较大的K),或者干平流和日出(较小的Kc)等都会导致其迅速消散。在模式后处理的实际操作时,只要应用LWC(z)的计算就可以了。当计算的近地面(比如z=10m)处的LWC>0,可以证明,K<Kc的条件也自动满足。用表2的系数和式(1)求得消光系数,再用能见度计算公式(2)可将LWC(含水量C)转换为实用的能见度大小;如果LWC为0,用SW99方法则赋为预定的最大值20km;如用GSD方法则仍可用地面RH用式(3)算得(见表3最后两列的例子)。
该方法已经被试验性地用在NCEP的区域集合预报系统SREF和NARRE-TL的雾强度的概率预报中。预报结果定时地发布在一天四次更新的SREF和每小时更新的NARRE-TL网站①NCEP SREF航空产品:http://www.emc.ncep.noaa.gov/mmb/wd20bz/SREF_aviation/web_site/html_212/fog.html;NCEP NARREL-TL产品:http://www.emc.ncep.noaa.gov/mmb/SREF_avia/FCST/NARRE/web_site/html/fog.html。。在具体计算时有几点要注意:第一,为充分利用模式本身对层云的预报,本方法首先检查模式输出是否有云顶低于400m,同时云底低于50m的层状云。如果有,地面层状云有可能转变为下沉雾或者有海雾发生。这时层云将被作为地面雾来处理,雾的厚度(H)就设为云顶的厚度,然后根据湍流交换系数和雾层内的水汽平流和冷却率来计算近地面的含水量。第二,通常的业务模式中的湍流系数采用所谓的长尾稳定度参数来计算。长尾稳定度参数在理查森数Ri达到0.25时没有截断(即稳定度参数仍不为0),目的是为了在近地层极为稳定时模式仍保持温度层的有效性(因为边界层温度计算依赖于这非零的稳定度参数)。在实际极稳定的大气中,地面层与上层气流出现了分离,边界层已经崩溃,稳定度参数应该为0。对辐射雾来讲,长尾稳定度参数可能不利于雾的形成。为此,可以采用短尾稳定度参数,比如Beljaars[40]和Beare等[41]的形式。第三,当温度极低时,雾将变为冰雾。在诊断冰雾时,饱和相对湿度的计算要按照以冰面为参考的相对湿度公式,其饱和阈值随着温度的降低而下降,比如在-20℃时相对湿度达到80%就开始饱和了。第四,总冷却率的计算依赖雾的厚度。当雾或饱和层较厚时,可以用层内平均的变温率来计算也可以用雾顶附近的变温率来计算[39]。当雾或饱和层较薄时,可以用地面2m的变温率来计算。
最后介绍2010—2011年冬季(11月—次年2月),加拿大环境厅FRAM(Fog Remote Sensing and Modeling)项目在加拿大北部城市黄刀国际机场进行的冰雾观测实例[42-43]。该项目用能见度和以此方法同时对NCEP NAM等模式对14场冰雾的预报能力进行了检验和比较。结果表明,在这14场冰雾中,用能见度来预报漏报了一半以上的冰雾,而用此方法,预报有明显地改进。 每场雾基本都能报出来, 只是起止时间有误差。现用一例来说明,该冰雾发生在12月17日半夜当地时间00:00。地面气温为-20℃,雾持续时间为12h,第二天中午12:00消散(表3中第一列的阴影区)。雾形成前静风无云,是典型的辐射雾。冰雾发生时地面冰雾粒子被有效地观测到,能见度低于1000m。NAM对黄刀机场当天的4次能见度预报都在4000m左右。说明模式近地面有饱和凝结,但没有产生足够的冰水量使能见度小于1000m。如果用NAM的输出场在后处理用此方法进行再诊断,雾就被预报出来。尽管预报的雾发生时间提前了4h,消散时间提前了5h(见表3第五、九、十、十一和十二列黑体数字)。为了说明该方法中各过程在诊断过程中的作用,表3列举了NAM 12:00时(当地时间)发布的前25h预报时间内每小时的地面2m处相对湿度(RH2m)和冰相饱和相对湿度(RHs)、饱和层(雾前)和雾厚度(H)、10m处冰雾含水量(IWC10m)、水量的冷却产生率(βCo)、水量的平流产生率(Adv)、水量的总产生率(冷却和平流之和,Total)、湍流和临界湍流交换系数(K和Kc)、雾边界层厚度(δ)以及SW99法(Vis1)和GSD法(Vis2)计算的两种能见度的诊断数据。

表3 NAM 25h预报时间内每小时的地面2m处相对湿度(RH2m)和冰相饱和相对湿度(RHs)、饱和层(雾前)和雾厚度(H)、10m处冰雾含水量(IWC10m)、水量的冷却产生率(βCo)、水量的平流产生率(Adv)、水量的总产生率(冷却和平流之和,Total)、湍流和临界湍流交换系数(K和Kc)、雾边界层厚度(δ)以及SW99法(Vis1)和GSD法(Vis2)计算的两种能见度的诊断数据Table 3 NAM 25 h hourly outputs for 2m relative humidity (RH2m), saturation relative humidity with respect to ice(RHs), saturated layer depth (before fog) and fog layer depth (H), ice fog water content at 10m (IWC10m), ice fog water generation rate due to cooling (βCo), and moist advection(Adv), ice water total generation rate (Total), turbulent exchange coefficient and its critical value(Kand Kc), fog boundary layer depth (δ), visibility with SW99(Vis1) and with GSD (Vis2)
表3左边第一列是预报时间,阴影部分是雾的实际发生到消散时间。NA为当未饱和或水量总产生率为负时不能计算。因为温度为-20℃左右,由气温计算的冰相饱和的相对湿度(第三列)大大小于100%,仅为80%左右。除了第一小时地面还未达到饱和外,其后22h地面相对湿度(第二列)都达到或超过了饱和值(第三列)。地面10m雾含水量IWC10m表明,雾在20时开始形成,比观测早了4h。尽管雾形成前6h地面已经饱和了,饱和层厚度(H)为40~60m,但雾没有形成。原因是前6h,实际的湍流交换系数(K)大于临界湍流交换系数(Kc)。δ也大于H。20时起,湍流交换系数(K)突然降到10-4以下,大大小于由饱和厚度、冷却和平流定义的临界湍流交换系数(Kc),δ也趋于0而小于H 。在雾形成前基本是干平流,但冷却产生的水量还是大于干平流的消耗,所以总的水量产生率是正值。除了在03时干平流的消耗和负的冷却产生率,雾有短暂的消失,04时雾又重新形成。该雾的厚度从形成到消散没有太大的变化,维持在60m左右。冰雾水量在0.05~0.1g/kg。湍流交换系数(K)一直维持在10-4~10-3(m2/s)的量级,在后期略有增大。δ也有所增厚。07时,由于日出,冷却率有所减小。但到10时之前,仍在冷却(北方太阳高度角较低)。由于干平流消耗(负值)仍维持在相同的水平,这导致雾水的总产生从正到负,使预报的雾比实际情况提早消散。虽然这次雾事件预报成功,但雾起止时间的预报误差说明,或许此法还有改进余地,但更有可能是模式输出的那些基本量中存在误差。可见,除了雾的诊断方法好坏,最终雾预报的准确性大大依赖于数值预报模式的质量。
2.3改善能见度和雾预报的途径
本节着重讨论了目前,特别是NCEP的能见度和雾的诊断预报方法。总体而言,模式对它们的预报能力仍停留和徘徊在较低的水平上。对数值预报中心而言,提高其可预报性仍有很长的路要走。从能见度和雾本身的特点及目前业务模式的发展状况,提高它们的可预报性有如下七个方面可以考虑:初始场、模式、诊断方法、订正、资料、集合预报和高污染条件下的气溶胶消光系数。
1)由于初始条件对雾的预报极其敏感,提高模式的初始场精度可有效地减小其误差。这方面改进观测和资料同化手段是关键,目前各中心采用的三维、四维和集合资料同化正是此目的。
2)改进模式有许多方面,这里只列三方面。①发展适合于雾的微物理参数化方案。目前所有可选用的微物理参数化方案没有充分考虑雾的微物理过程。如果充分考虑雾的微物理过程,雾的预报会有很大提高。比如Kim等对WRF-ARW的Thompson方案进行改进后发现,对冰雾的模拟能力有所提高[44]。英国气象局改进的针对雾和毛毛雨的微物理参数化方案对雾的预报能力也有所提高[45]。但对业务模式来讲,这种物理方案的改进不能影响到其他天气要素的预报。所以,如何在普通业务模式的云参数化方案中考虑地面各种类型雾的参数化仍是挑战性的课题。②寻找适合于雾的边界层参数化方案。目前可采用的边界层参数化方案有多种,但没有一种对雾的预报是最适合的。他们对不同的地区和不同的时间以及不同种类的雾,预报表现可能不同。③提高模式的水平和垂直分辨率。较高的水平和垂直分辨率可以有效地提高低能见度等小尺度天气和雾的预报能力。但这对模式本身的性能和计算条件要求较高。
3)研究和发展更有效的雾的诊断方法。由于模式的各种偏差和能力不足,对地面含水量的预报有很大的误差,造成地面低能见度计算的困难。用常规场在后处理中对雾进行再诊断不失是一种较实用的方法。但这种方法的精度仍依赖于模式输出的常规场的预报精度。
4)后处理订正是一种降低时空误差的有效可行方法,这包括偏差订正(时间误差)和降尺度(空间误差)。利用长期观测资料先对常规场的偏差进行订正,然后也可以再对能见度和雾预报的偏差进行订正如类似降水订正[46]。利用高精度资料进行降尺度,这对目前模式空间分辨率还不够情况下很有必要。
5)资料问题是上述3)和4)两方面的基础,如不同区域的地面雾和低能见度的长期观测资料的收集对验证和雾诊断方法参数的选取和订正有至关重要的作用。目前这方面的资料很缺乏,特别是偏远地区。这时自动站将发挥有利的作用。比如目前北美有5000多个连续观测的METAR自动站。NCEP每天将每小时包括能见度的资料经过处理放在其ADDS中让公众使用。既可以用作临近预报,也可被用来作为监视和验证模式低能见度和雾的预报效果的参考。除了站点观测资料,也要发展网格的分析资料以便直接用于模式。对于低能见度分析场的研究,NCEP目前用收集到的METAR和其他地面及高空资料结合RAP模式对地面能见度进行分析,得到地面能见度的每小时格点化的分析场。可以用来做模式的客观验证和对雾诊断参数的调整。另外NCEP还发展了全美2.5和5km的实时中尺度分析资料同化系统RTMA(Real Time Mesoscale Analysis),对地面要素和能见度进行分析产生它们的地面格点分析场。该资料已被用于模式的客观验证、模式参数调整以及模式预报的降尺度化等 。
6)进行雾的集合预报。考虑地球大气和模式的混沌性,雾对初始场误差很敏感,以及各种参数化方案的表现与时间、地点和天气系统本身的不同而变化。一种方案不可能在所有情况下都有较好的表现。这种由初始场误差引起的不确定性和各种参数化方案表现不同引起的系统误差是目前低能见度和雾的可预报性较低的重要原因。近年来发展起来的集合预报方法,为减少和定量化地表征以上两种误差引起的不确定性提供了很好的途径[47-48]。NCEP的实践证明,集合预报可有效地提高雾的预报能力和精度[20,34]。AWC专门利用区域集合预报SREF建立了全美各大机场TAF的冬季降雪和低能见度造成的重要天气概率预报,称为“冬季航空天气预报仪表操作台”。FAA主导的新一代航空管理系统NextGen也把预报的不确定性作为航空预报的一个重要组成部分以便更科学地来决策[49]。
7)结合中国国内雾霾污染的实际,开展对气溶胶粒子的消光系数的参数化的试验和数值模拟研究,寻找符合中国实际的气溶胶消光系数。可靠的气溶胶消光系数是计算高污染天气下能见度的关键。本文介绍的是NCEP的能见度业务预报,对高污染条件可能并不适用。近年来国内开展对雾霾污染的监测已得到充分地重视,积累了大量数据。中国气象局对其业务预报和预警工作正在有效地开展[50]。 大量和可靠的在高污染和雾和霾天气下的气溶胶粒子和能见度资料以及成熟的污染预报业务模式(如CMAQ)为气溶胶粒子的消光系数的参数化研究提供了基础。对提高在霾条件下能见度的预报有切实意义。
在中国,雾和低能见度的数值模拟研究始于20世纪80年代初,起步较早[51],但低能见度和雾的数值业务预报似乎还没有完全跟上[52]。为提高预报中心雾的业务预报能力,建议在国内雾和低能见度数值模拟研究的基础上结合中国的实际,加强业务模式后处理中雾和低能见度的诊断方法的研究,并将在过去雾的数值研究中得到的成果考虑在后处理中,加强全国雾观测网资料的收集,进行雾预报的统一验证和台站及航站预报员的自主验证,不断提高雾和低能见度的中心业务预报水平。目前中国气象局数值预报中心也已建立了业务运行的区域集合预报系统,并专门设有航空预报中心,所以可开展能见度和雾的集合预报产品;在民航华东空管局也已有试验性的集合航空预报系统和产品,在2010年上海世博会期间也有试用。因此,来定量描述航空预报中有关要素的可信度其各种条件也已基本成熟。
3 小结
航空天气要素对飞行航运有重要的影响。准确预报这些要素可以有效地提高飞行的安全性,扩大民用飞行空间的使用效率和降低机场的晚点率。航空天气要素分为航路要素和航站要素。航路要素包括哪些对飞机在巡航飞行时有害的天气条件,包括颠簸、结冰和对流等。航站天气包括对飞机起飞和降落有重要影响的天气,如低层风切变、雷暴、云底高度、能见度、雾和飞行约束分类等。在NCEP,除了临近预报外,不论是航路要素还是航站要素,通常都是在模式的后处理中通过不同的方法诊断产生的。本文着重介绍了能见度和雾在NCEP的区域模式中的诊断方法。其中,能见度有两种诊断方法。一种是Stoelinga-Warner方法,该方法要求预报模式有四种水凝性物质的输出。通过这些水凝性物质计算消光系数来估算水平能见度。第二种方法是GSD方法。该方法是前一种方法的改进,包括增加了更多的水凝性物质,用相对湿度估算高湿度时霾条件下的能见度,考虑了白天和夜里能见度的不同等。还讨论了以机场跑道为背景的跑道能见度的估计方法。除了能见度的诊断,NOAAMDL发展了模式数据的统计预报方法MOS和LAMP。但统计预报要求对迅速更新的模式版本进行及时的动态的参数调整。
目前各预报中心还没有把雾的预报作为模式指导预报中的正式内容。原因是业务模式对雾的可预报性很低。台站和航站预报员往往利用低能见度的预报或利用模式输出的其他与雾有关的常规要素(包括探空)来进行雾的经验预报。但低能见度有时并非由雾造成,而经验预报则带有很强的主观性,依赖于预报员对模式输出的各种要素场的误差理解。当模式版本更新很快时,预报员的经验有时跟不上模式新版本的变化。因此各台站和航站希望数值预报中心能试验性地提供雾模式指导预报。与其他航空要素一样,雾的模式预报仍是在模式的后处理中诊断的。除了UPS开发的方法,NCEP近年来着重研究和发展了两种雾的诊断方法。一种是多重规则方法,该方法利用能见度、云底、云顶高度、地面相对湿度和风速根据不同的阈值来对雾的发生与否进行诊断,但该方法不能确定雾的含水量和雾的强弱。另一种是根据Zhou-Ferrier的雾层平衡理论提出的雾发生和稳定的湍流强度必要条件以及雾层内含水量的垂直分布公式对雾含水量进行诊断。该条件由冷却率、水汽平流和雾前饱和层或雾层厚度所确定的临界湍流交换系数决定。只有当湍流强度小于该临界值时,雾才可能形成和稳定。
最后,本文讨论了进一步改善能见度和雾的业务模式预报的七种可行途径:减少初始场的误差,改进模式包括研究和选用合适于雾的微物理参数化方案、边界层参数化方案和提高模式分辨率,雾诊断方法的改进,后处理订正,加强雾的观测网和分析场的研究,并强调了雾集合预报的重要性,以及结合中国多污染的实际来开展气溶胶消光系数的研究。总之,目前雾的业务预报能力还有限,还有诸多挑战,有很长的路要走,希望本文能起到一些推动作用。
[1]NOAA NWS. National Weather Service Report. Washington D C:NOAA, 2014.
[2]Aviation Weather Center. Seminar in 2014 Summer Aviation Experiment Testbed. Kansas City, August, 2014.
[3]Gultepe I, Tardif R, Michaelides S C, et al. Fog research: A review of past achievements and future perspective. Pure Appl Geophys,2007, 164: 1121-1159.
[4]NOAA. Federal Meteorological Handbook, No. 1 (FMH-1). Washington D C: NOAA, 1995.
[5]NCEP Environmental Modeling Center. NAM model document. http://www.emc.ncep.noaa.gov/index.php
[6]Benjamin S, Devenyi D, Smirnova T, et al. From the 13km RUC to the rapid refresh. 12th Conference on Aviation Range and Aerospace Meteorology, Atlanta, 2006. Amer Meteor Soc, 2006.
[7]NOAA Earth system Research Lab. The High-Resolution Rapid Refresh (HRRR). http://rapidrefresh.noaa.gov/hrrr.
[8]Du J, DiMego D, Tracton M S, et al. NCEP short-range ensemble forecasting (SREF) system: Multi-IC, multi-model and multiphysics approach// Cote J. Research Activities in Atmospheric and Oceanic Modelling, Report 33. CAS/JSC Working Group Numerical Experimentation, WMO/TD-No. 1161, 2003. http:// www.emc.ncep.noaa.gov/mmb/SREF/srefWMO_2003.pdf.
[9]Zhou B, Du J, Manikin G, et al. Introduction to NCEP’s time lagged North American Rapid Refresh Ensemble Forecast System(NARRE-TL). Conference on Aviation Range and AerospaceMeteorology, Los Angles, August, 2011. Amer Meteor Soc, 2011.
[10]Koch S E, Ferrier B, Stoelinga M T, et al. Te use of simulated radar reflectivity fields in the diagnosis of mesoscale phenomena from high-resolution WRF model forecasts. 11th Conf on Mesoscale Processes, Albuquerque, Oct 2005. Amer Meteor Soc, 2005.
[11]Zhou B, Du J, Liu S, et al. Verifications of simulated radar reflectivity and echo-top forecasts at NCEP, 24th Conference on Weather and Forecasting, Seattle, Jan, 2011. Amer Meteor Soc, 2011.
[12]Bright D R, Wandishin M S, Jewell R E, et al. A physically based parameter for lightning prediction and its calibration in ensemble forecasts. 22nd Conf on Severe Local Storms, Hyannis, Oct, 2004. Amer Meteor Soc, 2004.
[13]Zhou B, Du J, McQueen J, et al. An introduction to NCEP SREF aviation project. 11th Conf on Aviation, Range, and Aerospace Meteorology, Hyannis, Oct, 2004. Amer Meteor Soc, 2004.
[14]Bernstein B C, McDonough F, Politovich M K, et al. Current icing potential: algorithm description and comparison with aircraft observations. Journal of Applied Meteorology, 2005, 44(7):969-986. doi:10.1175/jam2246.1.
[15]Trojan G. GRIB Aviation Products. WAFC Washington Progress Report, Washington D C, August, 2007.
[16]Ellrod G P, Knapp D I. An objective clear-air turbulence forecasting technique: verification and operational use. Wea Forecasting, 1992, 7(1): 150-165.
[17]Turp D J, Macadam I, Bysouth C, et al. Development of GRIB Icing an Turbulence Products for WAFC London: WAFC London Progress Report, London, November, 2006.
[18]Sharman R, Wolff J, Wiener G. Technical description document for the graphical turbulence guidance product v2 (gtg2). FAA AWRP Turbulence PDT Project Technical Report, Boulder, 2004.
[19]NOAA/National Weather Service. NWS Instruction 10-813 of TAF. Washington D C: NOAA, 2004.
[20]Zhou B, Du J, Gultepe I, et al. Forecast of low visibility and fog from NCEP: current status and efforts. Pure and Applied Geophysics, 2011, 169(5/6): 895-909. doi:10.1007/s00024-011-0327-x.
[21]杜钧, 周斌斌. 雾的集合预报与集合预报的检验. 气象科技进展,2016, 待发表.
[22]Stoelinga M T, Warner T T. Nonhydrostatic, mesobeta-scale model simulations of cloud ceiling and visibility for an east coast winter precipitation event. J Appl Meteor, 1999, 38(4): 385-404.
[23]Smirnova T G, Benjamin S G, Brown J M, et al. Case study verification of RUC/MAPS fog and visibility forecasts. 9th Conference on Aviation, Range, and Aerospace Meteorology,Orlando, 2000. Amer Meteor Soc, 2000.
[24]Skamarock W C, Klemp J B, Dudhia J, et al. A description of the advanced research WRF, Version 2. NCAR Technical Note, 2005.
[25]Clark P A, Harcourt S A, Macpherson B, et al. Prediction of visibility and aerosol within the operational Met Office Unified Model.Ⅰ: model formulation and variational assimilation. Q J R Meteorol Soc, 2008, 134(636): 1801-1816. doi:10.1002/qj.318.
[26]Rasmussen R M, Vivekanandan J, Cole J, et al. The estimation of snowfall rate using visibility. J Appl Meteor, 1999, 38(10):1542-1563.
[27]Kunkel B A. Parameterization of droplet terminal velocityand extinction coefficient in fog models. J Climate Appl Meteor, 1984,23(1): 34-41.
[28]Gultepe I, Müller M D, Boybeyi Z. A new visibilityparameterization for warm-fog applications in numerical weather prediction models. J Appl Meteor Climatol, 2006, 45(11): 1469-1480. doi:10.1175/ jam2423.1.
[29]Aviation Weather Center/NCEP. Aviation Digital Data Service. http://www.aviationweather.gov/adds/cv.
[30]Glahn H R, Lowry D A. Te use of model output statistics (MOS)in objective weather forecasting. J Appl Meteor, 1972, 11(8):1203-1211.
[31]Ghirardelli J E, Glahn B. The meteorologival development laboratory’s aviation weather prediction system. Wea and Forecasting, 2010, 25: 1027-1051.
[32]Gardener T. Runway Visual Range. TMS Photometrics, 2007. http://www.maths-in-industry.org/miis/137/1/runwayvr.pdf
[33]Ryerson W R, Hacker J P. The potential for mesoscale visibility predictions with a multimodel ensemble. Wea and Forecasting,2014, 29: 543-562.
[34]Zhou B, Du J. Fog prediction from a multimodel mesoscale ensemble prediction system. Wea Forecasting, 2010, 25: 303-322.
[35]Duan Y, Gong J, Du J, et al. An overview of the Beijing 2008 Olympics Research and Development Project (B08RDP). Bull Amer Meteor Soc, 2012, 93: 381-403.
[36]Baker R J, Cramer J, Peters J. Radiation fog: UPS Airline conceptual models and forecast methods. 10th Conf on Aviation,Range, and Aerospace. Portland, 2002. Amer Meteor Soc, 2002.
[37]Black T L. Te new NMC Mesoscale Eta Model: Description and forecast examples. Wea Forecasting, 1994, 9: 265-278.
[38]Zhou B, Ferrier B S. Asymptotic analysis of equilibrium in radiation fog. J Appl Meteor and Climatol, 2008, 47: 1704-1722.
[39]Zhou B. Introduction to a new fog diagnostic scheme. NCEP Office Note 466, 2011
[40]Beljaars A. Te parameterization of the planetary boundary layer. ECWMF Report, 1992.
[41]Beare R. An intercomparison of large-eddy simulation of the stable boundary layer. Boundary-Layer Meteor, 2006, 118: 247-271.
[42] Gultepe I, Zhou B, Milbrandt J, et al. A review on ice fog measurements and modeling. Atmos Res, 2015, 151: 2-19.
[43]Gultepe I, Kuhn T, Pavolonis M, et al. Ice fog in Arctic during FRAM-Ice fog project: aviation and nowcasting applications. Bull Amer Meteor Soc, 2014, 95: 211-226.
[44]Kim C K, Stuefer M, Schmitt C G, et al. Numerical modeling of ice fog in interior Alaska using the weather research and forecasting model. Pure Appl Geophys, 2014, 171: 1963-1982.
[45]Wilkinson J M, Porson A N F, Bornemann F J, et al. Improved microphysical parameterization of drizzle and fog for operational forecasting using the Met Office unified model. Q J R Meteorol Soc, 2013, 139: 488-500.
[46]李俊, 杜钧, 陈超君. 降水偏差订正的频率(或面积)匹配方法介绍和分析. 气象, 2014, 40(5): 580-588.
[47]杜钧. 集合预报的现状和前景. 应用气象学报, 2002, 13(1):16-28.
[48]杜钧, 陈静. 单一值预报向概率预报转变的基础: 谈谈集合预报及其带来的变革. 气象, 2010, 36(11): 1-11.
[49]Souders C G, Kays T, Spincic S, et al. NextGen weather requirements: an update. 14th Conf on Aviation, Range, and Aerospace Meteorology, Atlanta, 2010.Amer Meteor Soc, 2010.
[50]康志明, 桂海林, 花丛. 国家级环境气象业务现状及发展趋势. 气象科技进展, 2016, 6(2): 64-69.
[51] 李子华.中国近40年来雾的研究. 气象学报, 2001, 59(5): 616-623.
[52]章国材. 中国雾的业务预报和应用. 气象科技进展, 2016, 6(2):42-48.
Aviation Weather and Model-Based Operational Forecasts of Low Visibility and Fog
Zhou Binbin1,2, Jiang Le1, Du Jun2
(1 I. M. Systems Group, Inc. U.S.A. 2 Environmental Modeling Center, NCEP/NWS/NOAA, U.S.A.)
This article introduces the operational predictions of hazardous weather elements to aviation both en-route and in TAF. Two visibility algorithms and three fog diagnostic schemes used at NCEP are discussed in particular. The frst visibility algorithm is Stoelinga and Warner method. This method requires outputs of four hydrometeors from a model to estimate optical extinction coeffcient and calculate visibility. The second visibility method is an upgrade to the frst one by adding more species of hydrometeor. This method can also estimate visibility in high humidity and haze conditions without knowing hydrometers as well as considering the differences between daytime and nighttime. The concept of airport Runway Visibility Range (RVR) is introduced and the relationship between the RVR and horizontal visibility range (HVR) is given. The fog diagnosis includes the UPS method, multi-rule method and physical-process balanced method. The UPS method uses surface-layer stability index. The multi-rule method uses a combination of visibility, cloud, surface humidity and wind speed to diagnose fog occurrence. These two methods do not predict fog intensity. The third method can diagnose both fog occurrence and intensity. It is based on the turbulence condition for fog formation and persistence as well as the explicit formulation of fog liquid water content suggested by a fog’s physical balance theory. Both multi-rule and physical-process balance methods have been implemented operationally in the NCEP’s regional ensemble forecast systems and showed encouraging results. However, the current skill of low visibility and fog forecasts directly derived from a numerical weather prediction model is generally low comparing to the forecasts of other weather elements such as precipitation. The diffculties are discussed and the ways of improvement are also suggested.
aviation weather, numerical weather prediction, model post diagnosis, visibility, fog
10.3969/j.issn.2095-1973.2016.02.003
2015年3月26日;
2015年7月27日
周斌斌(1958—),Email: binbin.zhou@noaa.gov
猜你喜欢
空气动力学学报(2020年1期)2020-11-29
种子(2019年8期)2019-09-11
中国特种设备安全(2018年10期)2018-12-18
时代农机(2018年11期)2018-03-17
中国交通信息化(2016年6期)2016-06-06
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27
电源技术(2016年9期)2016-02-27
国外科技新书评介(2014年5期)2014-12-17
 Advances in Meteorological Science and Technology2016年2期
Advances in Meteorological Science and Technology2016年2期
- Advances in Meteorological Science and Technology的其它文章
- 雾主题文献计量分析
- 海雾预报研究综述
- 空气污染对雾影响的研究进展
- 国家级环境气象业务现状及发展趋势
- Understanding of Sea Fog over the China Seas简介
- 气象史学科建设的坚实一步
——《气象科技史》评介