基于Linux的自动超越补偿控制系统设计*
2016-09-02 13:38葛世强陈大鹏洪草根江苏自动化研究所江苏连云港222061
传感器与微系统 2016年6期
葛世强,陈大鹏,洪草根(江苏自动化研究所,江苏连云港222061)
基于Linux的自动超越补偿控制系统设计*
葛世强,陈大鹏,洪草根
(江苏自动化研究所,江苏连云港222061)
以S3C2440A微处理器为核心,设计了一种基于嵌入式的排种器漏播自补种控制系统。该系统以激光传感器监测漏种、霍尔传感器监测排种器转速,通过监测排种器内部漏充种情况提前预知漏播,提出了一种基于超越离合器的漏播自补种控制算法,控制排种器自身的超越旋转实现自动补种,设计了可视化交互界面监控播种情况和故障报警。实验结果表明:漏种监测和转速监测准确率为100%,系统的补种成功率和补种后粒距合格指数在19.96 r/min转速以下能达到100%,在19.96 r/min以上时达到98%,补种及时,准确。
监控系统;嵌入式;漏播补种;自动控制
0 引言
精量播种具有省种、省工、省时、高产、经济等诸多优点,是缓解粮食缺口,解决季节性劳动力短缺的有效手段,精量播种是未来发展的方向[1,2]。但由于排种系统设计及使用条件的限制,目前机械式精量播种机漏播现象严重,以玉米为例,平均漏播率在10%以上[3,4],按4500株/667 m2种植,每株250 g,漏播空穴周围的边际效应按2%计算[5,6],则玉米漏播损失在1654 kg/hm2以上。若出苗后在漏播位置人工补种或人工移栽,终因生长差异不能正常生长,需采用漏播补种装置在播种时高质量的自动补种[7]。
目前,国内外对漏播自补种已有一定的研究,但只是在已有排种系统的基础上,额外加装了一套补种系统,或者仅是通过两套排种系统同时工作来减少漏播率,不仅系统庞杂,而且采用的排种管内监测方式存在补种位置滞后、不准确等问题[8~11]。
本文研究在大籽粒作物漏播自补种装置[12]基础上,设计了一种基于嵌入式的漏播自补种控制系统,旨在简化系统结构,提前预知漏播,实现排种器自身超越旋转自动补种,提高播种质量。
1 系统设计
本系统的设计平台是大籽粒作物排种漏播自补种装置,其组成结构如图1所示。该装置利用超越离合器的单向锁合原理,集排种器与补种装置为一体,能够在不干涉动力源的情况下使排种器加速旋转补种。本控制系统监测排种器内部,提前预知漏播,根据监测的漏种信息和实时转速,通过控制算法计算步进电机的补种转速和旋转角度,驱动排种器自身加速旋转,实现位置无偏差补种并能够故障报警。
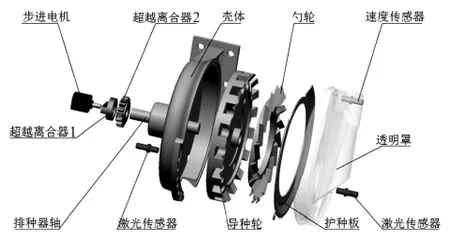
图1 大籽粒作物漏播自补种装置Fig 1 Automatic reseeding device of large grain crops
1.1系统构成
漏播自补种控制系统框图如图2所示。
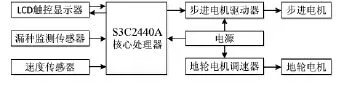
图2 漏播自补种控制系统结构示意图Fig 2 Structure diagram of automatic reseeding control system
系统的核心处理器是S3C2440A,主要完成排种器实时转速和补种时机、转角和转速的计算、LCD触控显示器的驱动以及控制算法的实施;漏种监测传感器采集漏种信息;速度传感器采集排种速度;LCD触控显示器用于调整系统参数,实时显示播种数、漏播数、排种速度、粒距等信息;步进电机及驱动器驱动排种器加速旋转,执行补种操作;地轮电机及调速器模拟地轮为排种器提供正常作业时提供动力,电源为系统提供电力。
1.2控制方案设计
系统的控制目标是提前预知漏播,在排种器至多连续3个漏充种的情况下,当漏充种槽位本应排种的那一时刻排出补位的种子,实现位置无偏差补种,若大于连续3个漏充种时,可认为排种器故障或作物种子不合格,系统向用户报警。
系统监控流程如图3所示,漏种监测传感器监测排种器内部导种轮充种情况,处理器根据漏种位置和数量以及此时的排种器转速和空槽位旋转到排种口的角度,通过控制算法得出补种转速和角度,控制步进电机驱动排种器,使导种轮缺种槽位之后有种子槽位快速补位,实现补种。若漏种监测传感器没有监测到漏种,步进电机待机,排种器常速排种;若监测到漏种,判断当前连续漏充种数是否不小于4,若是,则故障报警;反之,则步进电机驱动排种器加速补种。
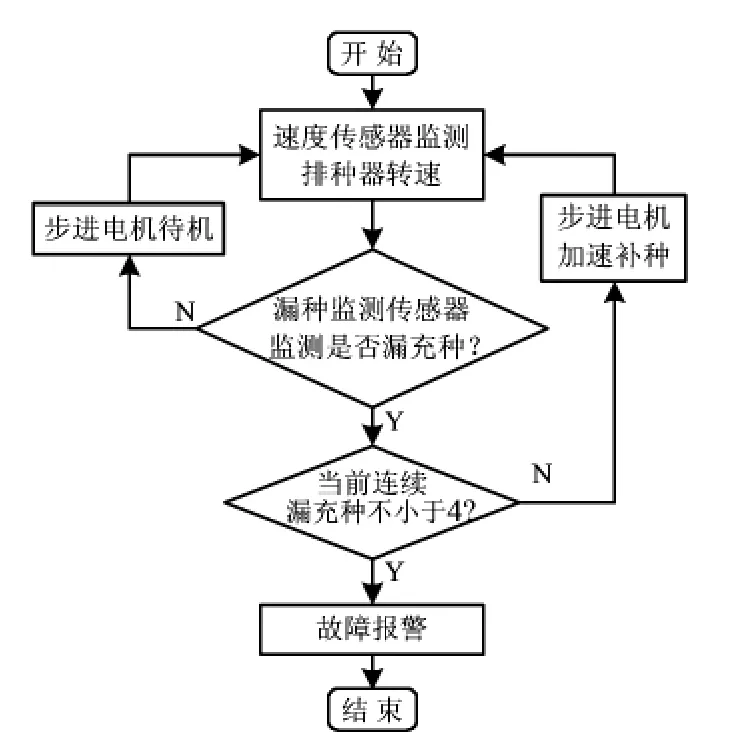
图3 监控系统控制方案流程图Fig 3 Flow chart of control scheme for monitoring system
1.3控制算法
1)行走速度计算:行走速度用速度传感器输出电平下降沿信号数量计量。本研究中排种器18个种勺均匀分布,每个种勺经过速度传感器时会输出一个下降沿,排种器旋转一周输出18个下降沿。行走速度为
式中v为行走速度,km/h;n为每秒处理器接收到的下降沿个数;d为播种粒距,m。
2)排种器转速计算:排种器18个种槽均匀分布,每相邻两个槽位间的夹角为π/9 rad。排种器转速为

式中ω为排种器转速,rad/s。
3)补种转速和旋转角计算:当监测到有连续m个漏充种时,补种转速和旋转角为

式中ω'为补种转速,rad/s;θ为旋转角弧度,rad。
2 模块设计
系统包含电源、速度传感器、漏种监测传感器、LCD触控显示器和步进电机及驱动器5个主要模块。
2.1电源模块
系统供电电源是车载DC12V电瓶,而控制电路需要DC5V电压,据此设计直流降压稳压电路,其他模块可直接由DC12V供电。
如图4所示,基于LM2576设计了一种DCl2V—DC5V降压稳压电路,该降压稳压电路实测输出电压为5.02 V,且非常稳定。
2.2速度监测模块
速度监测对象为勺轮,材质为铁铝合金,选用开关型CHE18—8NA—A710接近式霍尔传感器,其感应方式为接近式,检测物体为铁钢铜铝等金属,响应时间<1 μs。
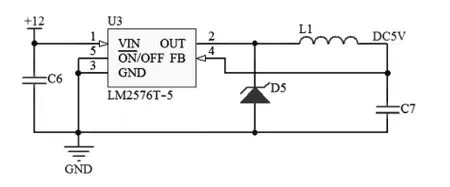
图4 降压稳压电路Fig 4 Step-down and voltage-regulator circuits
测速程序采用下降沿计数方式。排种时种勺旋转到与传感器足够近的距离,输出高电平变为低电平,产生一个下降沿信号;种勺离开传感器足够远的距离,输出低电平变为高电平,产生一个上升沿信号。勺轮上均匀分布的18个种勺产生周期性的边沿触发信号,处理器测得每秒接收到的下降沿个数,根据式(2)得到排种器实时角速度ω,rad/s。测速程序流程图如图5所示。
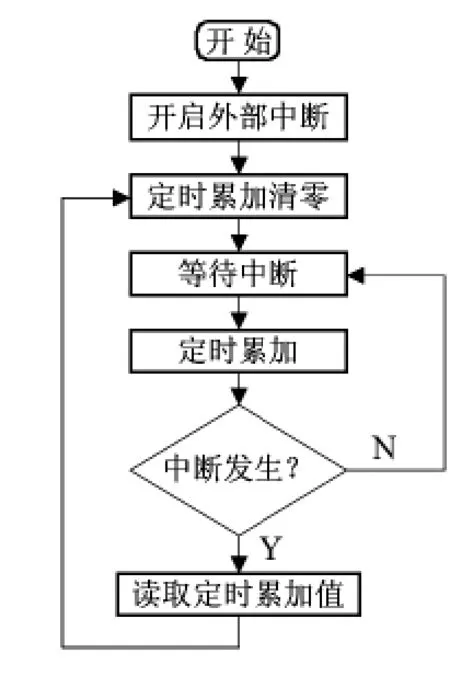
图5 测速程序流程图Fig 5 Flow chart of speed measurement program
S3C2440A处理器的GPIO外部中断EINT9接收霍尔传感器发送来的下降沿中断信号,监测和计算每秒接收到的下降沿个数,编写外部中断EINT9的定时器程序,通过定时计数缓冲寄存器TCNTB0和定时比较缓冲寄存器TCMPB0换算成TCNT0定时器的时间,根据控制算法编写GPG1接口下降沿监测和速度换算驱动程序,得出排种器转速。
霍尔传感器与处理器的电路原理图如图6所示,CON1的17脚为GPG1接口,对应外部中断EINT9,接收下降沿信号,Hall1的3脚接传感器信号线。
2.3漏种监测模块
种子在排出排种器前会在导种轮种槽中滞留一段时间,监测导种轮每个种槽是否漏充种,即可提前预知是否将会漏播。采用光电传感器监测,漏充种时光信号导通,反之光信号阻断。
排种器往往处于露天环境下工作,环境光复杂,玉米种子体积小,光线易衍射,因此,采用激光传感器监测种槽,其灵敏度高、响应速度快、精度高、抗干扰能力强,可以使监测孔设计的很小,利于提高漏种监测的准确性。
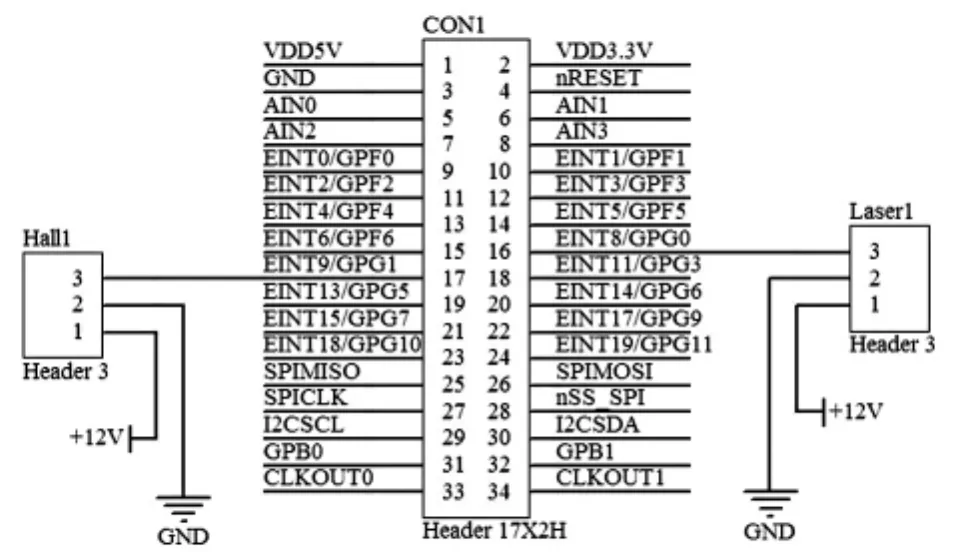
图6 速度监测模块和漏种监测模块电路图Fig 6 Circuit diagram of speed monitoring module and seed monitoring module
激光传感器与处理器的电路原理图如图6所示,CON1的16脚为GPG0接口,对应外部中断EINT8,接收漏种信号,Laser1的3脚接传感器信号线。
2.4LCD触控显示模块
触控显示屏作为监控系统的人机交互界面,提供直观的监测结果和便捷的操作方式。选用统宝3.5 in(1in= 2.54 cm)真彩LCD显示屏,分辨率为240×320,压阻式触控。界面由“Qt图形用户界面应用程序开发框架”编写,显示数据包括播种速度、株距、当前排种行、漏播穴数、补种穴数、报警提示等,设计开始、停止、复位等虚拟按键。
2.5步进电机模块
选用42HS08型步进电机(雷赛智能控制股份有限公司,深圳)精确控制补种角度和转速。选用JK0220数字式中低压步进电机驱动器(常州精控电机电器有限公司,常州)与之配套,能够达到高细分的效果,运行平稳,噪音小,具备良好的调速性能。
驱动器拨码开关SW1~SW3设定为OFF,以便为步进电机提供稳定电流;SW4设定为OFF,减少步进电机和驱动器的发热量,提高可靠性;SW5设定为OFF,SW7,SW6 和SW8设定为ON,使微步细分调整为400 step/r。
处理器依据控制算法,利用TCNT1定时器得出一定数量和频率的PWM信号,由GPB1接口输出到驱动器PUL控制接口,控制步进电机的补种转角和转速。
3 性能实验
3.1软件仿真
利用Proteus软件搭建该系统,并对其进行仿真。仿真用两个脉冲发生器分别代替速度传感器和漏种检测传感器,用示波器监测步进电机模块控制端信号输出结果。仿真结果表明:硬件电路设计合理,软件程序运行正确。
3.2实验结果
为验证系统设计的可行性,根据各模块原理图搭建了实际电路和实验台,实验装置如图7所示。
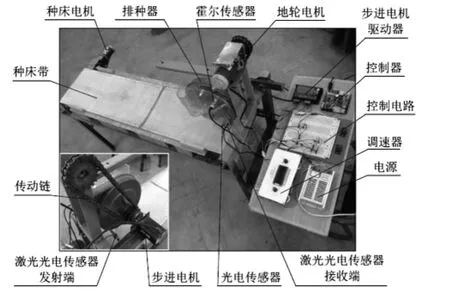
图7 漏播自补种性能实验台Fig 7 Test-bed of automatic reseeding characteristics
实验台以种床带的前进速度模拟播种机的工作速度,由电动机驱动并且通过变频器调节速度,为防止种子发生滚动和弹跳,种床带进行“溜沙”处理,便于粒距测量。试验材料为郑单958玉米种,半马齿型,千粒质量330.4 g,质量含水率12.7%。
1)排种器转速精度实验:利用接触式DM6235P转速表检测速度监测模块测速精度。排种器实际作业转速为7.4~23.1 r/min,在此范围均匀地取 6个测速点:7.4,10.54,13.68,16.82,19.96,23.1 r/min,对比转速表和速度监测模块转速的差异,每个测速点实验50次,统计转速误差Δω,实验结果如表1所示。
2)LCD触控显示实验:观察播种速度、当前排种行、漏播穴数、补播穴数和株距的数据以及故障指示灯是否显示正确,虚拟按键是否可用。
3)漏种监测准确性实验:将排种器中种子清空,调节排种器至以上6种转速下运转,每种转速实验50圈,测试漏种监测模块能否监测到每一个空种槽,统计漏种监测准确率B,实验结果如表1所示。
4)补种精度实验:在以上6种转速下,人为使排种器漏充种,连续漏充种数分别为1粒、2粒、3粒及以上,每种转速实验50次,检验补种成功率K、报警指示灯正确率W,测量补种后粒距,根据国标JB/T 10293—2013单粒(精密)播种机技术条件提供的标准,计算出补种后粒距合格指数A,实验结果如表1所示。
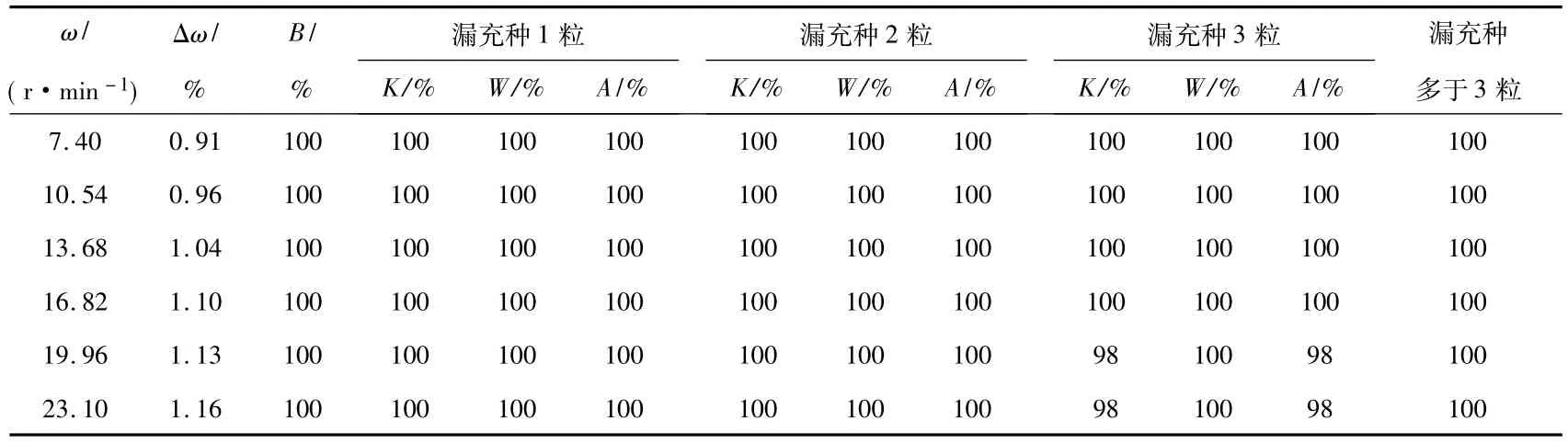
表1 漏播自补种精度实验Tab 1 Precision test of automatic reseeding
4 结论
1)LCD触控显示屏工作良好,各项数据和指示灯显示及时准确,虚拟按键响应正常。
2)在低转速下,测速精度较高,随着转速的增加,机架振动加剧致使速度监测精度有所降低,测速误差增高,但转速误差Δω不高于1.16%,系统仍具有较高的测速精度。
3)在每种转速下,漏种监测准确率为100%,系统的漏种监测精度较高。
4)系统在7.4~23.1 r/min的排种速度下具有良好的补种效果,系统对于排种器的故障能够准确报警,报警指示灯准确率达到100%。
5)在漏充种1粒和2粒的情况下,系统补种成功率K为100%,补种后粒距合格指数A为100%;当连续3粒漏充种时,排种器转速不高时补种成功率为100%,但在转速高达19.96r/min以上时,出现了2%的补种滞后,这是由于排种速度本身很高,而补种需要超越旋转的角度和速度,在此基础上提高了3倍,导致步进电机扭矩在高速旋转时有所降低,加之排种器自身摩擦阻力较大,造成了偶然的步进电机丢步现象,超越旋转角度偏小,补种后粒距偏大,但在实际作业中,排种器转速达到19.96 r/min以上的情况很少,即便如此,系统补种成功率和粒距合格指数仍达到了98%的较高水平。
[1]李雷霞,郝志明,杨薇,等.精密播种机排种性能检测系统的研制[J].农业工程学报,2012,2(8):16-19.
[2]陈进,边疆,李耀明,等.基于高速摄像系统的精密排种器性能检测试验[J].农业工程学报,2009,25(9):90-95.
[3]祁兵,张东兴,崔涛.中央集排气送式玉米精量排种器设计与试验[J].农业工程学报,2013,29(18):8-15.
[4]刘佳,崔涛,张东兴,等.气吹式精密排种器工作压力试验研究[J].农业工程学报,2011,27(12):18-22.
[5]王铁固,赵新亮,张怀胜,等.玉米产量的边际效应及与主要农艺性状的相关分析[J].中国农学通报,2012,28(18):122-126.
[6]王铁固,赵新亮,张怀胜,等.玉米产量及主要农艺性状的边际效应[J].广东农业科学,2012,39(4):22-25.
[7]张继成,陈海涛,欧阳斌林,等.基于光敏传感器的精密播种机监测装置[J].清华大学学报:自然科学版,2013,53(2):265-268,273.
[8]周利明,王书茂,张小超,等.基于电容信号的玉米播种机排种性能监测系统[J].农业工程学报,2012,28(13):16-21.
[9]Du Ruicheng,Gong Bingcai,Liu Ningning,et al.Design and experiment on intelligent fuzzy monitoring system for corn planters[J]. International Journal of Agricultural&Biological Engineering,2013,6(3):11-18.
[10]Singh T,Mane D.Development and laboratory performance of an electronically controlled metering mechanism for okra seed[J]. Agricultural Mechanization in Asia,Africa and Latin America,2011,42(2):63-69.
[11] Wang Zhanglei,Fang Hongxia,Chakrabarty K,et al.Deviationbased LFSR reseeding for test-data compression[J].IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems,2009,28(2):259-271.
[12]朱瑞祥,葛世强,翟长远,等.大籽粒作物漏播自补种装置设计与试验[J].农业工程学报,2014,30(21):1-8.
Design of automatic over-compensation control system based on Linux*
GE Shi-qiang,CHEN Da-peng,HONG Cao-gen
(Jiangsu Automation Research Institute,Lianyungang 222061,China)
In order to solve these problems,an automatic reseeding system based on Linux is designed.The system uses S3C2440A as core.The system adopts a Hall sensor to get the speed of the seed-metering device.A laser sensor is used to monitor the loss of seeds.The system can monitor inside of the seed-metering device to foresee the loss.An automatic reseeding control algorithm based on overrunning clutch is proposed.Through the control algorithm,the seed-metering device can overrun itself to reseed,an interactive visualization interface is designed to monitor the loss of seeds and give failure warning to the user if the seed-metering device has a breakdown. Experimental result shows that the accuracy rate of the loss and speed monitoring are 100%,the reseeding rate and the qualified index of seed space both are 100%while rotating speed is lower than 19.96 r/min and are 98% while rotating speed is higher than 19.96r/min,the automatic reseeding system can reseed timely and accurately.
monitoring system;embedded;reseeding compensation;autocontrol
TP302.1
A
1000—9787(2016)06—0099—05
10.13873/J.1000—9787(2016)06—0099—05
2015—10—13
国家自然科学基金青年科学基金资助项目(61305050)
葛世强(1989-),男,江苏连云港人,工程师,从事嵌入式系统设计与研究。
猜你喜欢
园艺与种苗(2022年6期)2022-07-13
新疆农机化(2022年1期)2022-03-02
河北农机(2021年9期)2021-12-07
中华养生保健(2020年10期)2021-01-18
现代农村科技(2020年8期)2020-07-28
农机化研究(2019年4期)2019-12-21
农业与技术(2019年9期)2019-05-28
时代农机(2019年5期)2019-02-11
农业工程学报(2018年24期)2019-01-14
家庭用药(2016年5期)2016-05-14