基于统计方法的自适应阈值SUSAN边缘检测方法
2016-09-01 03:56:25徐黎明马正华吕继东
西北师范大学学报(自然科学版) 2016年4期
徐黎明,马正华,吕继东*
(1.江苏城乡建设职业学院建筑设备系,江苏常州 213147;2.常州大学信息科学与工程学院,江苏常州213164)
基于统计方法的自适应阈值SUSAN边缘检测方法
徐黎明1,2,马正华2,吕继东2*
(1.江苏城乡建设职业学院建筑设备系,江苏常州213147;2.常州大学信息科学与工程学院,江苏常州213164)
针对传统SUSAN边缘检测方法要人为根据图像不同对比度反复调整设定阈值,检测结果随机性强、不稳定的缺点,提出了一种自适应生成灰度差阈值的改进SUSAN算法.首先,通过统计的方法来反映相邻像素点灰度的空间分布情况;然后,计算图像的对比度,建立对比度与灰度差阈值的关系;最后,生成自适应的灰度阈值,进行边缘检测.本文算法的实验结果与其他边缘检测算法相比,边缘检测效果更好,并且具有抗噪性能.
SUSAN算法;边缘检测;灰度差;对比度;自适应阈值
图像的边缘主要表现为图像局部特征的不连续性,是图像中灰度变化比较剧烈的部分,并且包含丰富的图像信息.边缘检测能从图像中提取有效的边缘信息,来标识图像中亮度变化显著的点,是图像处理、图像分析、模式识别和计算机视觉的基本步骤,是目前图像处理领域的热点研究课题,其检测结果的正确性和可靠性为进一步的图像分析奠定重要基础[1].
图像的边缘特性一般具有这样的特点:沿边缘走向的像素值变化比较平缓,而垂直于边缘方向变化比较剧烈.传统的检测方法是微分算子法,根据图像边缘具有上述的方向和幅度两个特性,用微分(导数)算子来检测边缘上的变化,其中一阶微分(导数)以最大值对应边缘,而二阶微分(导数)则以零点对应边缘位置[2].常用的微分算子有Roberts算子、Sobel算子、Prewitt算子和Laplace算子等.但这些算子往往存在一些不足,Roberts算子定位精度不高、处理后的图像边缘不够平滑;Prewitt算子利用局部差分检测边缘,往往丢失边缘信息,边缘检测精度不高;Sobel算子较易产生错误边缘,提取的图像轮廓有时并不理想;Laplace算子对噪声比较敏感,常产生双像素宽度的边缘;而Canny算子在检测模糊图像时会平滑掉部分边缘信息[3-6].
SUSAN边缘检测算法与上述算法相比不需要梯度计算,并具有算法简单、定位准确等特点[7],但传统SUSAN算法需根据不同对比度图像的具体情况来设置不同的灰度差阈值t,从而使得边缘检测效果具有随机性,不能总获得理想的效果,为此本文对此进行研究以实现能够自适应选取阈值的SUSAN边缘检测,获得准确的边缘检测结果.
1 SUSAN边缘检测方法
1.1SUSAN边缘检测原理
SUSAN(Smallestunivaluesegmentassimilatingnucleus)是Smith等提出的最小核同值区域算子,是一种并行边缘检测算子,采用USAN原理,依据图像同一区域内的特征相近或基本一致,而不同区域之间的特征则存在很大差异的特点,通过对模板覆盖像素的统计,来提取目标的特征(角点、边缘)[8-9].该算法不同于常规卷积算法,不是采用正方形模板,而是采用一种近似圆形模板,在整个图像上移动,把模板内部每个像素点的灰度值与模板中心像素的灰度值进行比较,若模板内某像素点与模板中心(核)的灰度值之差小于某个阈值,则认为该像素点与核具有相同的灰度值,并把满足该条件的所有像素组成的区域称作核同值区(USAN).
当圆形模板在图像中移动时,USAN区域面积会相应的变化,如图1所示.当圆形模板完全处在背景或图像中时,区域面积最大;当模板向图像边缘移动时,USAN区域逐渐变小;当模板中心移到图像边缘时,USAN区域很小;当模板中心移动图像角点附近时,USAN区域最小.因此,设定合适的阈值,通过计算图像中每一个像素点USAN值,来查找小于该阈值的像素点,便可确定边缘点.

图1SUSAN边缘检测原理
Fig1SUSANedgedetectionprinciple
1.2SUSAN边缘检测算法
1.2.1算法描述用一个近似圆形模板来扫描图像,如图2所示,依次对模板内的每一个像素点与模板中心像素点的灰度值进行比较,比较方法为
(1)
其中,r0为模板中心像素点;r为模板中除中心之外的其他像素点;I(r)为图像在r处的灰度值;I(r0)为图像在r0处的灰度值;t为灰度差的阈值;c(r,r0)为是否属于USAN区域的判别函数.
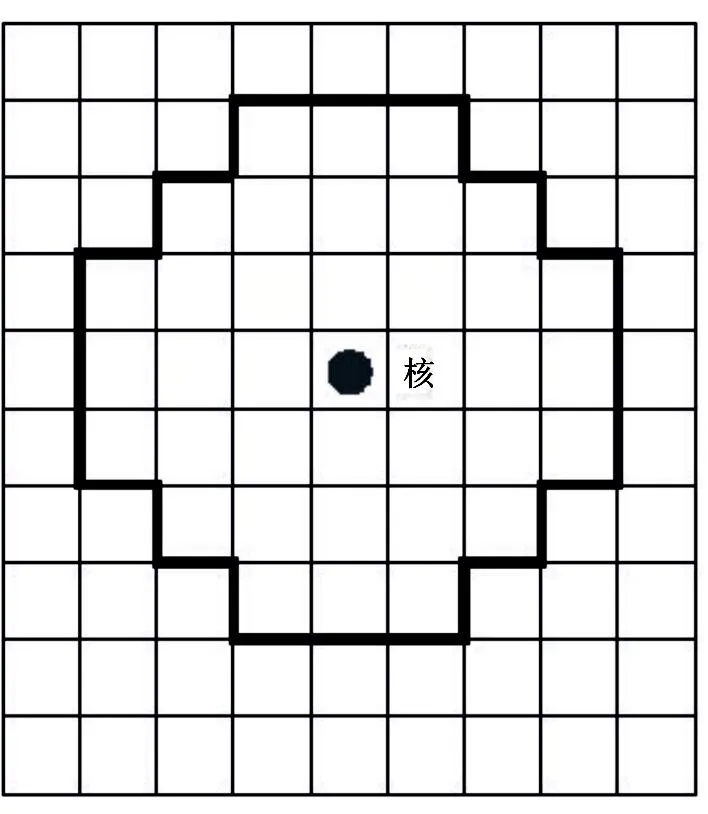
图2SUSAN模板
Fig2SUSANtemplate
c(r,r0)通常采用(2)式所示的更稳定、更有效的相似比较函数.根据理论和实验验证,当指数取6时,能精确地检测边缘[10-12]
(2)
对模板下的每个像素点进行如上运算后,对结果c(r,r0)进行累加,即
(3)
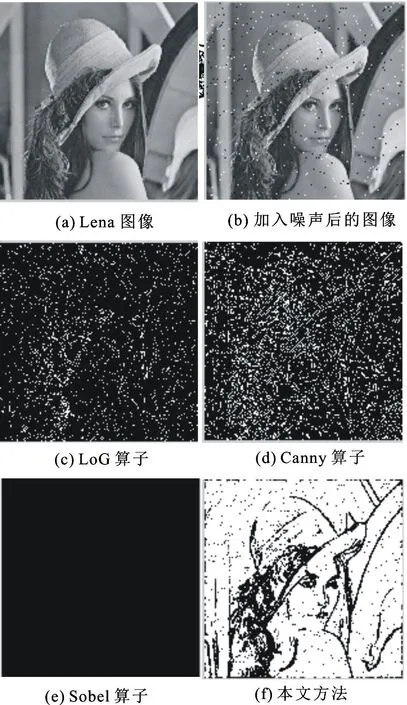
所得的n(r0)就是USAN的像素数目,即USAN区域面积.接下来与预先取定的阈值g比较,当n(r0) 阈值g决定了可定义为边缘点的USAN最大值,如果图像中的某个像素的USAN值小于g,则该点就会被作为边缘点给提取出来.阈值g选取过大,则容易误把附近其他不是边缘点的像素给提取出来,阈值g选取过小,则会造成部分边缘点的漏检.因此,g通常取为3nmax/4,其中nmax表示圆形模板内像素点的总个数. 灰度差阈值t往往反映SUSAN算子所能检测的边缘点最小的对比度和所能忽略的噪声最大容限能力,取值与对比度有关.模板一般选择包含37个像素,半径为3.4个像素近似圆形的模板,否则,如果模板过小,则可能漏检部分边缘点;如果模板过大则会增大运算量. SUSAN原理在使用过程中需要根据具体情况对不同对比度的图像设置恰当的灰度差阈值t,对图像的边缘检测效果进行控制.由于灰度差阈值t表示的是所能检测到的边缘点的最小对比度,是区分目标与背景的一个重要阈值,决定了能够提取的边缘点数量.若t越小,则可从对比度越低的图像中提取边缘点,且提取的边缘点也越多,因此对于不同对比度和噪声情况的图像,应取各自不同的t值.本文根据图像的对比度,给出一种阈值 t 的自适应选取方法. 阈值t与灰度差有关.而灰度是一个绝对值,对比度是一个相对值,就一幅图像来说,它反映了图片上最亮处与最暗处的比值,可以说没有灰度差就没有对比度.在不同的文献中有很多种不同的关于对比度的定义[13-14],但这些对比度的定义都不适合作为图像处理中的对比度[15]. 注意到图像像素间颜色以及像素间灰度的重复规律或者变化的规律都可以通过纹理反映出来,相应可以借助纹理特征来研究图像相邻像素点灰度的空间分布情况,而对比度就是纹理特征中的特征之一.纹理特征的研究方法中最早的且应用最广泛的是统计学方法[16-18],因此本文用统计的方法,基于像元及其邻域的灰度属性,结合一阶、二阶或高阶统计特性,描述像素点灰度的空间分布情况,用平均值、方差、峰度、四阶矩来给出对比度的公式定义,具体见(4)~(8)式.标准差 (4) 方差 (5) 四阶矩 (6) 峰度 (7) 从而得出对比度 (8) 其中xij为第(i,j)个像素的灰度值. 研究图像区域中的对比度这个统计特性,使得所求得的对比度更能反映图像中像素点的空间分布,从而建立阈值t与对比度之间的关系,如(9)式所示: (9) 其中c为0.05~0.02之间的常数.经过多次验证,可发现c取0.025时都能得到很好的边缘检测效果. 改进后的SUSAN边缘检测算法的具体步骤 1)根据统计方法,由(8)式计算图形的对比度Fcon; 2)由(9)式计算自适应灰度差阈值t; 3)根据阈值t,由(2),(3)式计算该点USAN区域的大小; 4)将得到USAN区域面积与阈值g相比,来进行边缘点的检测. 为了验证改进方法的有效性,在Matlab 2012b软件平台中进行实验测试,对三幅不同对比度的原始图进行边缘检测,其实验结果如图3~5所示. 图3Cameraman图像自适应阈值边缘检测图 Fig 3The edge detection figure of cameraman image on the adaptive threshold 图4Lena图像自适应阈值边缘检测图 Fig 4The edge detection figure of lena image on the adaptive threshold 图5Diaohua图像自适应阈值边缘检测图 Fig 5The edge detection figure of diaohua image on the adaptive threshold 而如果利用原有的SUSAN边缘检测方法,则需要对根据不同图像对比度,通过实验反复验证来选择不同的阈值,才会出现如上自适应阈值相似的效果,具体效果如图6~8所示. 图6Cameraman图像在阈值T=25时边缘检测图 Fig 6The edge detection figure of cameraman image 图7Lena图像在阈值T=20时边缘检测图 Fig 7The edge detection figure of Lena image 图8Diaohua图像在阈值T=30时边缘检测图 Fig 8The edge detection figure of diaohua image 图9不同算法边缘检测结果 Fig 9The detection result of different edge-detecting algorithm 对Lena图像加上均值为0,方差为0.02的椒盐噪声,分别用Canny算子、LoG算子、Sobel算子和本文改进的SUSAN算子对被噪声污染的图片进行边缘提取,比较其效果,实验结果如图9所示. 通过实验发现,Canny算子、LoG算子和Sobel算子对噪声比较敏感,不能检测出想要的图像边缘,而本文算法抗噪声的性能很好,可以用于被噪声污染的图像的边缘检测. 本文根据SUSAN边缘检测方法的原理,分析阈值选取的特点,从统计方法着手,尝试用获取对比度的方法来进行自适应选取阈值,从而可处理各种复杂多样的图像,避免阈值选择的随机性和不确定性,影响边缘检测的效果.经过验证,本方法的有效性、可行性都较好. [1]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005,31(3):415. [2]高朝阳,张太发,曲亚男.图像边缘检测研究进展[J].科技导报,2010,8(20):112. [3]李成.基于SUSAN算法的边缘检测方法研究[D].长沙:湖南师范大学,2014. [4]曾俊,李德华.彩色图像SUSAN边缘检测方法[J].计算机工程与应用,2011,47(15):194. [5]曾俊,李德华.彩色图像SUSAN边缘检测方法[J].计算机工程与应用,2011,47(15):194. [6]王智文.几种边缘检测算子的性能比较研究[J].制造业自动化,2012,34(6):14. [7]淡雪,岳晓奎.基于SUSAN算法的空间目标分割算法[J].科学技术与工程,2011,11(11):2533. [8]SMITH S M,BRADY J M.SUSAN:a new approach to low level image processing [J].InternationalJournalofComputerVision,1997,23(1):45. [9]宋健飞,高 莉.基于四元数的改进型最小核值相似区边缘检测[J].计算机应用,2015,35(3):826. [10]赵小川.MATLAB图像处理——能力提高与应用案例[M].北京:北京航空航天大学出版社,2014. [11]PEREZ M M,DENNIS T J.An adaptive implementation of the SUSAN method for image edge and feature detection[C]//InternationalConferenceonImageProcessing.IEEE Explor:Colorado Springs,1997:394. [12]戚银城,苑清,李婷,等.基于SUSAN算子的嘴部轮廓特征提取方法[J].电视技术,2014,38(23):142. [14]ARAUZ-PACHECO C,RAMIREZ L C,PRUNEDA L,et al.The effect of the aldose reductase inhibitor,ponalrestat,on the progression of diabetic retinopathy[J].JDiabetesComplicat,1992,6:131. [15]CALDWELL R B,BARTOLI M,BEHZADIAN M A,et al.Vascular endothelial growth factor and diabetic retinopathy:Pathophysiological mechanisms and treatment perspectives[J].DiabetesMetabResRev,2003,19:442. [16]谢正祥,刘玉红,王志芳,等.人类视觉对比度分辨率的非线性补偿原理和方法[J].成都医学院学报,2009,4(3):157. [17]步亚东.图像纹理特征提取的研究[D].济南:山东师范大学,2012. [18]刘丽.图像纹理特征提取方法综述[J].中国图象图形学报,2009,14(4):622. [19]TAMURA H,MORI S,YAMAWAKI T.Textural features corresponding to visual perception[J].IEEETransactionsonSystems,ManandCybernetics,1978,8(6):460. (责任编辑孙对兄) Adaptive threshold SUSAN edge-detectingalgorithmbasedonstatisticalmethods XU Li-ming1,2,MA Zheng-hua2,LÜ Ji-dong2 (1.Department of Construction Equipment,Jiangsu Changzhou Higher Vocational School of Construction,Changzhou213147,Jiangsu,China;2.SchoolofInformationScienceandEngineering,ChangzhouUniversity,Changzhou213164,Jiangsu,China) AimtotheshortcomingoftraditionalSUSANalgorithmneedtosettheappropriategraydifferencethresholdmanually,accordingtothedifferentcontrastoftheimageinspecificcircumstances,andtheedgedetectioneffectisnotstablewithstrongrandomness,animprovedSUSANalgorithmisputforwardwiththeadaptivegraydifferencethreshold.Firstly,thespatialdistributionofadjacentpixelsisexpressedwithstatisticalmethod;secondly,thecontrastoftheimageiscalculated,therelationshipbetweenthecontrastandthegraythresholdisestablished;finally,theadaptivegraydifferencethresholdisgeneratedtodetectedge.TheexperimentalresultsshowthattheperformanceoftheimprovedSUSANalgorithmisbetterthanotheredge-detectingalgorithm,andithasmorestronganti-noiseproperty. SUSANalgorithm;edgedetection;graydifference;contrast;self-adaptivethreshold 10.16783/j.cnki.nwnuz.2016.04.010 2016-01-15;修改稿收到日期:2016-03-20 江苏省自然科学青年基金资助项目(BK20140266);江苏省高校自然科学研究面上项目(14KJB210001)江苏省高等职业院校国内高级访问学者计划资助项目(2014FX031);常州大学科研启动资助项目(ZMF13020019) 徐黎明(1974—),女,江苏南通人,副教授,硕士.主要研究方向为计算机应用、图像处理. E-mail:892188160@qq.com TP391.4 A 1001-988Ⅹ(2016)04-0041-05 *通讯联系人,男,讲师,博士.主要研究方向为机器人视觉测量与控制.E-mail:vveaglevv@163.com2 改进的SUSAN边缘检测算法
3 实验结果





4 结束语

猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
数学物理学报(2021年2期)2021-06-09 08:54:26
高技术通讯(2021年3期)2021-06-09 06:57:48
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年5期)2017-05-14 06:20:56
自动化学报(2017年11期)2017-04-04 02:52:44
数学物理学报(2016年3期)2016-12-01 05:36:27
光学精密工程(2016年1期)2016-11-07 09:01:59