
瀑布沟水电站移民安置场地GPS变形监测首级控制网设计
2016-08-26 02:10:32胡自全杨智翔
全球定位系统 2016年3期
胡自全,杨智翔
(1.西安市地下铁道有限责任公司,西安 710018; 2.江西省水利规划设计院,南昌330029)
瀑布沟水电站移民安置场地GPS变形监测首级控制网设计
胡自全1,杨智翔2
(1.西安市地下铁道有限责任公司,西安 710018; 2.江西省水利规划设计院,南昌330029)
研究了GPS控制网的设计的精度估算方法,建立了GPS动态变形监测控制网的优化设计模型,针对大渡河瀑布沟水电站移民安置场地变形监测工程GPS变形监测控制网进行了试验研究,结果显示该控制网的基线中误差在5 mm以内。
GPS;变形监测;控制网
0 引 言
瀑布沟水电站水库是大渡河下游的一个河道型水库,淹没区涉及四川省汉源县、石棉县和甘洛县。其中,汉源县位于瀑布沟水电站库区内,距水电站大坝约32 km,城区内高程780~820 m,因瀑布沟水电站正常蓄水位为850 m高程,汉源县城另选新址搬迁至与原汉源县城一河之隔的萝卜岗场地。萝卜岗场地位于流沙河与大渡河所围的宽缓斜坡上,山体走向北偏西40°,长约6.5 km,宽1.5~1.9 km.萝卜岗西北端场地在施工阶段,发现西北端场地M地块和N地块有长度数米至数十米,宽度数厘米至数十厘米的拉裂缝分布,随后又在乱石岗区域、康家坪区域、富塘区域发现古滑坡体,分布高程大约在850~1060 m范围内,必须采取有效措施对其进行监测。汉源新县城边坡采用GPS传统方法与GPS一机多天线方法联合监测方式,挡墙等密集型监测区域则采用GPS一机多天线方法进行监测[1]。
GPS变形监测中控制网的设计至关重要,变形监测控制网的设计包括选点、网形设计、精度和可靠性估算分析等,其中精度和可靠性是评定控制网质量的重要指标,但目前可借鉴的评定规范与标准较少[2]。根据工程施工的要求,需要在图上设计GPS点位及组成的图形,若按设计方案实施所得的结果,经常会遇到能否达到工程要求的设计指标的问题[3]。本文针对这一问题,根据GPS网平差的理论,探讨GPS变形监测控制网的精度的估算方法,设计瀑布沟水电站移民安置场地GPS变形监测控制网,并估算其精度。
1 GPS控制网的精度估算
1.1精度估算的基本原理
GPS网的观测量是伪距、载波相位和时间,通过静态同步观测,可解算出基线向量及其协方差阵,GPS网的平差是将生成的基线向量作为观测值进行平差的。在无法模拟GPS网的原始观测值的情况下对GPS控制网进行精度估算时,可将基线向量投影到某一参考椭球面并进一步投影到高斯平面上后,该基线实际上是一条长度和边长都已知的边,即把GPS网看作观测了边长和方向的平面网[5]。
在GPS控制网选点、构网及观测方案确定后,在图上量测各控制点的近似坐标,确定观测量的误差方程式的系数B,根据基线网的等级和所选择的仪器设备确定观测值的权P和单位权中误差,可组成法方程系数矩阵
NBB=BTPB,
(1)
控制网参数的协因数矩阵

(2)
可写为
(3)


(4)
据此进一步估算点位精度、边长精度和方位精度用于衡量GPS网精度的指标。
1.2精度估算

1) 待定点的坐标误差、点位误差、误差椭圆元素
第i点的纵、横坐标的权函数式分别为



代入转换系数方程求出转换系数,可计算出Qxixi、Qxiyi和Qyiyi.则点位坐标中误差和点位中误差为

(5)
点位误差椭圆的半长轴、短半轴和长轴方位角为
(6)
2) 任意边的方位误差、边长误差、相对点位误差和相对误差椭圆元素
设任意边两端点点号为i、j,其相对点位误差的权函数式为
(7)
上述函数的权倒数和相关权倒数

(8)
将QΔxijΔxij、QΔyijΔyij和QΔxijΔyij分别代替Qxixi、Qxiyi和Qyiyi,再代入式(2)和式(3)可以分别计算出相对点位误差和相对误差椭圆和相对误差椭圆元素。
边长权函数公式为

(9)
边长中误差为

(10)
坐标方位角函数式可线性化为
δTij=aijδXi+bijδYi-aijδXj-bijδYj,
(11)
根据协因数传播率得

(12)
1.3误差方程式的建立
GPS控制网设计时,可以在WGS-84坐标系统下进行控制点的三维精度估算,然后应用精度转换公式转换到二维,也可以直接估算控制点的二维精度[3]。
设有二维基线向量观测值ΔXij=(Δxij,Δyij)T,其基线向量的误差方程式为

(13)
当i点位固定点时,基线向量ij的误差方程式为

(14)
当j点位固定点时,基线向量ij的误差方程式为
(15)
二维基线向量观测值的权阵ΔXij的权根据GPS接收机的标称精度计算。

(16)

(17)
式中:a,b为GPS接收机边长测量固定误差和比例误差因子;c,d为GPS接收机方向测量固定误差和比例因子;S为基线长度。
根据
(18)
其微分关系式

(19)
求得基线向量观测值的协方差阵

(20)
式中,α为基线近似坐标方位角。

(21)
法方程阵
N=BTPB.
(22)
求逆得待定值的协因数矩阵,可进一步应用式(6)~(13)估算点位精度、边长精度和方位精度。
2 瀑布沟水电站移民安置场地GPS变形监测控制网
2.1变形监测控制网优化设计模型
GPS变形监测控制网设计,首先选择参考基准,根据设计GPS控制点的近似坐标和独立基线,通过坐标反算求边长、方向以及方位角,最后按边长、方向和方位角观测精度进行模拟计算[1]。对计算结果进行分析,逐步修改设计方案,直至GPS网满足设计的精度要求。基于GPS控制网设计的精度估算原理,建立GPS动态变形监测控制网优化设计模型,如图1所示。
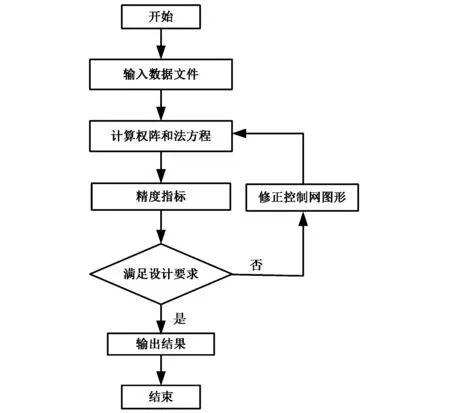
图1 控制网优化设计模型
设计方案优化按解析法解算,目前还没有得出较合理的构造标准矩阵,为此可采用机助模拟法进行优化。首先按上述精度的公式编制一个程序,按初步的设计方案,给定一组初始数据,组成设计矩阵B和法方程系数矩阵BTPB进行精度估算,并计算这些精度数值与要求的精度指标进行比较,如不满足要求,则根据经验对初步设计的方案进行修正,如增删观测值、调整观测图形等,按调整的设计方案再进行上面所述的计算,直至获得满意的设计方案为止[7]。
2.2GPS变形监测控制网设计
1) 控制点的选取
GPS基准点宜分布在滑坡体周围地质条件良好,点位稳固,且易于长期保存的地方。在基准点附近没有树木、高大山峰等的遮挡,保证视野开阔,以保证GPS信号的良好接收,同时应尽量避免将基准点选在附近有高反射面的地点特别是具有强反射的大面积水域周围,以减少多路径效应影响,另外还需避免将基准点选在大功率无线发射台附近[8]。一个滑坡体周围分布2~3个基准点,多个临近滑坡体的基准点可共用,某一区域的基准点连成一起,构成基准网。全测区可按区域布设多个GPS基准网,它们就近与GPS的A、B级控制网点联测,以利于分析基准网的可靠性及变形情况。
根据测区概况,选定6个基准点,给出现场地理图,解释TN01-TN06的地理位置,如图2所示。
2) 技术要求
该控制网采用国内IGS永久跟踪站的ITRF框架坐标作为基准点的起算数据,按照国家B级GPS网的设计指标进行观测设计[10],主要技术要求如表1所示。
3) 实验研究结果分析
实验采用Trimble Net R5型GPS接收机,其静态和快速静态GPS测量的精度指标:水平,±5mm+0.5 ppm RMS.垂直,±5 mm+1 ppm RMS.

图2 瀑布沟水电站移民安置场地GPS变形监测

级别相邻点基线分量中误差水平垂直同步双频GPS接收机数卫星高度角观测时段每时段观测时间采样间隔B5mm10mm≥4≥15°44h30s
以TN01为起算点,根据GPS动态变形监测控制网优化设计模型,设计瀑布沟水电站移民安置场地GPS变形监测控制网。经过优化设计选取了14条基线,结果如表2所示。

表2 基线精度估算表 (单位mm,弧度)
由表2、可知,设计GPS变形监测控制网的基线精度≤5 mm,满足表1的设计指标。
3 结束语
为了在各种GPS变形监测设计方案中选择满足精度要求的方案,本文结合瀑布沟水电站移民安置场地变形监测的工程实践,研究了GPS控制网的设计的精度估算方法。通过研究待定点坐标误差、点位误差、误差椭圆元素及任意边的方位误差、边长误差、相对点位误差、相对误差椭圆元素,建立GPS控制网的误差方程式及GPS动态变形监测控制网的优化设计模型。应用该计算模型对瀑布沟水电站移民安置场地GPS变形监测网进行了试验研究,结果显示该控制网的基线中误差满足规范要求,具有较高的应用价值。
[1] 胡自全.基于GNSS的边坡变形监测与预报方法研究[D].南京:河海大学,2010
[2] 刘祖强,张正禄,邹启新,等. 工程变形监测分析预报的理论与实践[M]. 北京:中国水利水电出版社, 2008.
[3] 赵长胜. GPS控制网优化设计系统[J]. 现代测绘, 2003(5):6-8.
[4] 钟连琨. GPS网观测方案的精度估算及优化[J]. 工程勘察, 1999,(5):58-62.
[5] 张正禄. 工程的变形监测分析与预报[M].北京:测绘出版社, 2007.
[6] 张华海, 王宝山, 赵长胜,等. 应用大地测量学[M]. 徐州: 中国矿业大学出版社, 2007.
[7] 周秋生. 测量控制网优化设计[M]. 北京: 测绘出版社, 1992.
[8] 许斌. 小湾电站高边坡GPS形变监测系统研究[D]. 南京: 河海大学, 2005.
[9] 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2005.
[10]国家质量技术监督局. 全球定位系统(GPS)测量规范(GB/T 18314-2009)[S]. 北京: 中国标准出版社,2009.
Pubugou Hydropower Station Resettlement Site GPS Primary Control Network Design Deformation Monitoring
HU Ziquan1,YANG Zhixiang2
(1.Xi'anMetroCo.,Ltd,Xi′an710018,China; 2.JiangxiProvincialWaterConservancyPlanningandDesigningInstitute,Nanchang330029,China)
Studied the accuracy of GPS control network design estimation methods, the establishment of a GPS dynamic deformation monitoring network optimization design model for a dam deformation monitoring of the resettlement site works GPS deformation monitoring network were studied, the results showed that the control Network baseline error within 5mm.
GPS; deformation monitoring; control network
2016-01-10
江西省水利厅重大科技课题(编号:KT201322)
P228.4
A
1008-9268(2016)03-0084-05
胡自全(1983-),男,河南柘城人,硕士,工程师,注册测绘师,主要研究方向为卫星大地测量、岩土工程监测。
杨智翔(1983-),男,江西遂川人,博士,高级工程师,主要从事遥感应用及水利信息化。
doi:10.13442/j.gnss.1008-9268.2016.03.017
联系人: 胡自全 E-mail:287113131@qq.com
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
小学生学习指导(中年级)(2021年10期)2021-11-01 08:17:08
装备制造技术(2021年4期)2021-08-05 07:40:24
现代测绘(2021年1期)2021-04-28 10:19:56
制造技术与机床(2018年12期)2018-12-23 02:41:18
数学小灵通·3-4年级(2017年12期)2018-01-23 03:37:53
测绘科学与工程(2016年4期)2016-04-17 06:51:08
中学数学杂志(高中版)(2015年3期)2015-05-28 18:12:20
化学分析计量(2013年3期)2013-03-11 16:37:20
全球定位系统(2010年2期)2010-07-18 03:49:58
