
基于三维垂直逆投影面的枚举车速检测算法
2016-08-25 05:39刘瑞芝孙士杰王菽裕孙丽婷
电子设计工程 2016年14期
刘瑞芝,孙士杰,王菽裕,孙丽婷,关 琦
(长安大学 信息工程学院,陕西 西安 710064)
基于三维垂直逆投影面的枚举车速检测算法
刘瑞芝,孙士杰,王菽裕,孙丽婷,关 琦
(长安大学 信息工程学院,陕西 西安710064)
在传统的基于视频图像处理技术,一般在二维平面上进行,但是由于三维空间到二维空间的透视变换,使得同一刚性目标在图像中体现出非常显著的尺度变化和几何形变,这种变化使基于图像的目标检测和识别变得复杂和困难,直接造成了对于高度信息的丢失。在目标的检测和跟踪中造成,进而造成车速检测的不精确性。本文提出了一种基于三维逆投影面的SAD模板匹配和枚举测速算法。主要是基于逆投影数据,利用SAD匹配算法和枚举结合的车速检测算法。首先利用已知的像素点和实际空间的坐标点,并求出二维到三维空间的转换矩阵,然后设立贴合车尾的垂直逆投影面,恢复车尾的逆投影数据,记为标准值,最后利用SAD匹配和枚举方法预测十帧以后该车辆的位置,求得最佳速度。
图像处理;逆投影数据;枚举测速;SAD模板匹配
交通的事件检测中车速的检测[1-4]成为交通管制,限速,防止造成交通事故,避免人员伤亡,进行交通预警的一个重要因素,也为日后分析和管理提供了有力的依据。
目前常用的交通信息采集技术有环形线圈检测器、测速雷达、红外线检测器、微波探测器、超声波探测器、基于视频图像的处理技术等。但是每种检测技术都有其缺陷,基于视频的检测技术有其与生俱来的优越性。但是由于三维空间到二维空间的透视变换,使得同一刚性目标在图像中体现出非常显著的尺度变化和几何形变,这种变化使基于图像的目标检测和识别变得复杂和困难,直接造成了对于高度信息的丢失,在目标的检测,跟踪中造成,进而造成车速检测的不精确性。
基于以上分析,本文提出一种基于三维逆投影面[5]的车速检测算法。首先进行相机的标定[6-10]并求出二维到三维空间的转换矩阵,设置贴合车尾的垂直逆投影面[5],恢复车尾的逆投影数据[5],记为标准值,最后利用SAD匹配[11-13]和枚举方法[14]预测十帧以后该车辆的位置,求得最佳速度。枚举[8]即利用粗调和细调的方法进行SAD模板匹配[11-13],进而求得最佳的瞬时速度。(通过恢复三维空间的数据,可以消除图像中的尺度变化和几何形变,进行车辆的更加精确的跟踪和速度的准确检测。)
1 基于三维逆投影数据的枚举车速检测
1.1基本概念
1)摄像机标定
摄像机标定[6-10]是计算机视觉领域中从二维图像获取三维空间信息必不可少的步骤。三维场景与二维图像之间的映射关系是由摄像机的内外参数共同决定的,恢复摄像机内外参数的过程称为摄像机标定。其中,内部参数是指摄像机的焦距、特征比、畸变因子和主点等,外部参数是指世界坐标和摄像机坐标之间的相对旋转和平移。
2)SAD(Sum of absolute differences)
SAD模板匹配[11-13],即在模板中选取一个小窗口像素块u1,预测摸板中的像素块u2。用u1和u2两像素块对应坐标处的每个像素值做差,然后求绝对值之和,找到SAD的最佳值(也就是最佳值),此时u2就是最佳的预测模板。
3)逆投影面
在一个已标定的交通场景中,我们在三维空间中设置一个位置已知的平面,那么图像到这个平面的映射是确定的,可以将二维图像上的数据逆投影到这个平面,得到逆投影图[7],这个过程我们称为图像逆投影,购置的平面称为逆投影面。
1.2测速算法
本测速算法如下:本文提出一种基于三维垂直逆投影面[5]的车速检测算法。首先进行相机的标定并求出二维到三维空间的转换矩阵,设置贴合车尾的垂直逆投影面,恢复车尾的逆投影数据,记为标准值,最后利用SAD匹配[11-13]和枚举[14]方法预测十帧以后该车辆的位置,求得最佳速度。枚举[14]即利用粗调和细调的方法进行SAD模板匹配[11-13],进而求得最佳的瞬时速度。粗调是以速度间隔为主,求得十帧以后的位移值,恢复各个逆投影数据[5],进行SAD模板匹配[11-13],求得最佳位移值。细调则是在粗调的基础上对在位置上做微调,恢复各个的逆投影数据,进行SAD匹配求取最佳位移值,进而求得最佳速度值。具体步骤如下:
1)摄像机标定
摄像机标定就是将实际空间坐标M以及其相应的图像坐标m,通过透视矩阵C进行转换和表示,关系式如下:

其中,C是一个3×4大小的摄像机标定矩阵,m=[u,v,1]T和M=[x,y,z,1]T分别是图像点及其对应的三维空间点的齐次坐标,它们之间的关系可用矩阵形式表示,如下:

选取已知的6个点,求得透视矩阵C,得到像素点和空间点的像素转换关系。如图1所示。
2)设置垂直的逆投影面
在摄像机进行标定完之后,对车辆进行标记。记录车尾点的坐标(u,v),并在车尾部分设置垂直逆投影面。由于对整个车尾信息进行跟踪会增加运算量,选取贴合车尾的一部分检测面进行跟踪匹配。本文我们选取200*100大小的跟踪区域进行研究(即:在车尾点对应的y值确定的基础上,x向左向右各扩展1 m,z的高度扩展1 m)。根据跟踪区域的选定,恢复三维逆投影数据。设置的逆投影面如图2所示。

图1 摄像机三维标定的6个点

图2 设置的垂直逆投影面
3)车辆的预测与匹配
因为在短时间内的瞬时速度是不变的,选取跟踪后的第十帧图像进行研究。根据设置贴合车尾的垂直检测面,恢复车尾的逆投影数据,记为标准值,预测十帧以后该车辆的位置,求得最佳速度。预测分为粗调和细调两步。
粗调:
粗调是以速度间隔为主,求得十帧以后的位移值,恢复此时的三维逆投影数据,进行SAD模板匹配,求得最佳位移值。位移公式如下:

式中:Interspeed代表速度间隔为5 cm/帧,即每帧图像物体运动5 cm。FrameNum为间隔的帧数,取常数10。k=0、1、2 …19;则第k个速度对应的位移值为:

恢复第k个位移值对应的三维逆投影数据与标准的逆投影数据做SAD模板匹配。求得每个速度对应的SAD模板匹配值。最小的SAD值对应的位移就是粗调位置,记为RoughSk,此时的粗调速度为:

细调:
细调则是在粗调的最佳位置上做微调,恢复不同位置的三维逆投影数据,进行SAD模板匹配求取最佳位移值,进而求得最佳的速度值。

细调时在粗调位置的基础上,以0.05 m为单位在其基础上移动(移动20次,向右向左各移动10次,Num=20),则第m次移动时对应的位移值为:

式子中:m=0、1、2...19,求它每个位移值对应的三维逆投影数据,用第m次移动时的逆投影数据与标准数据做SAD模板匹配。存储细调位移对应的一系列SAD匹配值。最小的SAD值对应的位移就是细调位置,记为DetailSm,对应的细调速度为:

Dspeed就是此时的最佳速度值。
2 测试结果
文中选取任意的一段公路行驶视频,在行驶的车辆中,随机的选取一辆车以检测其行驶速度。视频以每40 ms/帧播放,十帧的时间为0.4 s。如图3所示,选定一辆白色的小轿车,如图3所示;此时为第138帧,初始位置为4.69 m,如图4所示;跟踪到148帧的时候,粗调预测位置为10.19 m,速度为49.5 km/h,如图5所示;细调之后,预测位置为9.94 m,速度为47.25 km/h,如图6所示。可以看出测出的车速与一般的车速误差不大。传统的视频车速检测方法94.8%,用时5 s,利这个方法精度达到96.4%,用时3 s,可以达到可以实时准确的检测出车速。

图3 手动跟踪的待检测车辆的垂直逆投影面

图4 跟踪的逆投影面
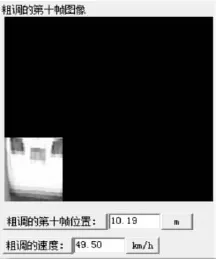
图5 枚举的粗调结果
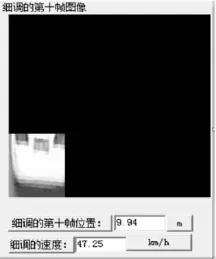
图6 枚举的细调结果
3 结 论
针对传统的基于视频图像处理技术,一般在二维平面上进行,但是由于三维空间到二维空间的透视变换,使得同一刚性目标在图像中体现出非常显著的尺度变化和几何形变,这种变化使基于图像的目标检测和识别变得复杂和困难,直接造成了对于高度信息的丢失,在目标的检测,跟踪中造成,进而造成车速检测的不精确性。本文提出了一种基于三维逆投影面的枚举车速检测算法,主要是基于逆投影数据,利用SAD匹配算法和枚举结合的车速检测算法。实验表明,该方法的测速检测准确率比在二维平面提高很多,达到96.4%,具有较强的精确度和实时性。
[1]宋俊芳.基于视频的车流量检测统计技术研究[D].西安:长安大学,2010.
[2]马慧明.车速检测技术述评[J].中北大学学报:自然科学版,2007(z1):i39-144.
[3]童建军,邹明福.基于监控视频图像的车辆测速[J].中国图像图形学报:A辑,2005,10(2):192-196.
[4]任述明,向怀坤,刘建伟,等.基于视频图像的车速检测研究[J].交通与计算机,2007(1):90-93.
[5]张茜婷,闫国伟.基于三维逆投影图的车速检测.现代电子技术,2015(16):70-72.
[6]YANGZhong-gen,RENLei.SVD-basedameraelfcalibrationand3-Dreconstructionfromsingle-view[C]// Machine Learning and Cybernetics,2004.Proceedings of2004 International Conference on,2004:4090-4095.
[7]马颂德,张正友.计算机视觉:计算理论于算法基础[M].北京:科学出版社,1998.
[8]于泓.摄像机标定算法研究[D].济南:山东大学,2006.
[9]陈铎.摄像机标定方法研究与实现[D].沈阳:东北大学,2008.
[10]B adalkhani,S.,Badamchizadeh,M.A.Amodified technique for 3D camera calibration[C]//Industrial Electronics(ISIE),2014 IEEE 23rd International Symposium on,2014:1914-1919.
[11]岳陈平,孟丽娅.基于SAD算法的立体匹配的实现[J].微型机与应用,2013,32(6):41-43.
[12]金芳,李俊波,杨勇.基于模板匹配与运动预测的跟踪算法研究[J].微计计算机信息:测控自动化,2007,23(7-1):313-315.
[13]李强,张钹.一种基于图像灰度的快速匹配算法[J].软件学报,2006,17(2):216-222.
[14]兰娟,孙强.一种枚举生成所有最小-最大堆的算法[J].计算机应用与软件,2013,30(8):291-293.
[15]E Xiaochen,YUNG N H C.Anovel algorithm for estimating vehicle seed from tow consecutive images[C]//IEEE workshop on Applications of Computer Vision.[S.l.]:IEEE,2007:111-120.
The enumeration of speed detection algorithm based on three-dimensional vertical plane
LIU Rui-zhi,SUN Shi-jie,WANG Shu-yu,SUN Li-ting,GUAN Qi
(Department of Information Engineering,Chang’an University,Xi’an 710064,China)
In traditional methods based on video image processing technology,generally in the two-dimensional plane,but due to the perspective transformation of three-dimensional space to two-dimensional space,makes the same rigid target in the image change and the geometric deformation of the scale significantly.This change makes the target detection and recognition complicated and difficult based on image,directly causing the loss of height information.In the target detection and tracking,it causes less precise in the speed detection.This paper proposes a SAD matching and enumeration speed algorithm,mainly based on three dimensional inverse projective planes.It is based on the inverse projection data,using the SAD matching algorithm combined with the enumeration of speed detection algorithm.First using the known the coordinates of the point of pixel and real space 3D coordinates gets the transformation matrix from 2D to 3D,and then set up the vertical inverse projective planes,recoveringthe inverse projection data of the rear and recording the standard.Finally using SAD matching and enumeration method to predict the vehicle position and getting the best speed after ten frames.
image processing;reverse projection data;enumeration the detection of speed;SAD template matching
TN911.73
A
1674-6236(2016)14-0165-03
2016-03-09稿件编号:201603115
国家自然科学基金项目(61572083);陕西省自然科学基础研究计划项目(2015JZ018)
刘瑞芝(1989—),女,山西晋中人,硕士研究生。研究方向:视频检测技术,图像处理。
猜你喜欢
速读·上旬(2022年2期)2022-04-10
现代职业教育·高职高专(2020年3期)2020-08-16
新课程研究·教师教育(2019年2期)2019-04-19
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技创新与应用(2016年6期)2016-05-14
建筑工程技术与设计(2015年19期)2015-10-21
电脑知识与技术(2015年12期)2015-07-18
汽车维护与修理(2015年5期)2015-02-28
