
电瓶车运输连接装置改进设计
2016-08-22 04:33周凤敏
大科技 2016年24期
周凤敏
(青岛滨海学院 山东青岛 266555)
电瓶车运输连接装置改进设计
周凤敏
(青岛滨海学院 山东青岛 266555)
电瓶车运输连接装置是一种新型的自动连接装置,运用装置内部的连杆等附属零件实现两车的自动连接和断开。该装置主要由T型杆、滑块、销钉、旋转机构、V型槽、电磁铁和部分外部电路组成。主要包括连杆机构设计、箱体设计、零件尺寸设计。该设计反复斟酌各种机构设计方案,全面考虑,反复校核,力求设计合理。
连接装置;连杆机构;仿真设计;旋转机构
引言
随着社会的进步,科学技术的飞速发展,人们的生活水平有了很大提高。科技进步也带来了工业的快速发展,机械设计是机械行业的主要组成部分,是决定机械性能的主要因素。在2011年德国诺威工业博览会上,德国相关协会提出了工业4.0的初步概念,从此,工业4.0在全世界兴起,2014年工业4.0进入中德合作新时代,在两国签署的纲要中,重点提出了工业生产的数字化、智能化、自动化,这对我国机械行业的未来发展具有重大意义。
在加工制造类企业中,由于受到车间空间的限制,大多数企业生产车间选择用电瓶车运送车间里的材料和半成品。目前电瓶车运输连接装置使用的是手动销轴连接,如图1所示。物料车装满货物后需驾驶员人工用销轴把电瓶车和物料车连接起来,驾驶员把货物运到仓库,手动去掉销轴,断开物料车和电瓶车的链接,完成一次货物运输。人工操作占用时间,增加劳动成本。另外销轴的手动操作时间短,电瓶车往往不会熄火,增加额外危险。基于以上问题,设计一种电瓶车自动连接装置,实现电瓶车和物料车的自动连接。

图1 现有物料车与电瓶车连接装置
1 确定电瓶车连接装置方案
现有的自动链接断开装置,大部分由液压,气压驱动,而企业使用的电瓶车动力、体积小,安装气压液压设备,消弱电瓶车动力,影响运输效率。针对现有情况选择连杆方式实现连接。
在物料车前方设计一活动推杆,电瓶车在倒车过程中,物料车前方的杆件顺利进入V型机构,在V型机构的底端安装一滑块,杆件推动滑块前进,随着底端的滑块向前运动,销轴滑块贯穿物料车前方杆件上的通孔,从而实现电瓶车与物料车的自动连接。销轴滑块末端安装一电磁装置,当电瓶车到达仓库时,按下按钮实现电瓶车与物料车的自动分离。机构示意图如图2所示。

图2 连杆滑块机构示意图
由机构运动示意图中不难看出,此机构共有5个活动构件,7个低副,0个高副,故机构的自由度为:
F=3n-(2p1+ph)=3×5-(2×7+0)=1
机构有确定的运动。
2 电瓶车连接装置主要零部件设计
2.1 连接装置的基本原理
电瓶车自动连接装置连接过程:连杆机构由原始状态转变为锁定状态,连杆机构由锁定状态转变为原始状态。改进连接装置原理图,如图3所示。

图3 改进连接装置基本原理图
2.1.1 原始状态
原始状态示意图如图4所示,原始状态是未连接物料车的状态,此时该机构中T型杆1与电磁铁1有一定距离,电磁铁1不带电。销轴5与电磁铁2紧密贴合,电磁铁2带电。V型槽与销轴5对应位置开有通孔,利于销轴的水平往复运动。由于机构为水平放置的,机构受到的重力不对运动效果造成影响。

图4 原始状态示意图
2.1.2 闭锁状态
图5为机构的闭锁状态,锁定状态为电瓶车与物料车连接的状态。T型杆1与电磁铁1紧密贴合,电磁铁1通电。销轴5穿过V型槽和物料车的推杆。

图5 闭锁状态示意图
2.2 物料车前端推杆
现有物料车的前端推杆,已经不能满足现在装置的需求,新设计的物料车前端推杆如图6,具体尺寸见图纸推杆。当推杆受力转动时,两侧弹簧控制推杆恢复原始位置,方便找正,使推杆能够顺利的进入装置的V型槽。推杆进入一定深度,销轴穿过通孔,完成锁定。
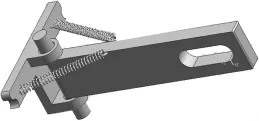
图6 物料车推杆示意图
2.3 转动杆的设计
2.3.1 材料选择
在满足实用要求和工艺可行的前提下,应尽量选用价格便宜的和供应充足的材料,提倡选用国产材料。45钢属于优质飞合金结构钢(中碳钢),具有一定的塑形和韧性,较高的强度,切削性能良好。经调质处理后具有良好的综合力学性能,用于制造受力较大要求强度、塑形和韧性都较高的机械零件,连杆材料选用45钢,毛坯尺寸精度要求为IT7~IT8级。
2.3.2 转动杆尺寸设计
设定T型杆向左推进60mm完成此过程。推杆GH长度是100mm,根据设计需要推杆需要向上推进80mm,为了避免运动到死点位置,假定原始位置如图7所示,经过仿真模拟分析此位置,运动速度较快,可以满足要求。
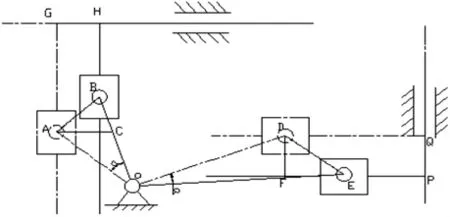
图7 运动状态分析图
如图7实线为初始状态,虚线为最终状态。原则上线段OE和线段OB均与T型杆一杆平行,为了方便观察画成图示样式。作辅助线AC、DF分别与OB、OE垂直。即:AC=GH=60mm、DF=QP=80mm。连杆逆时针旋转a度。
有以上已知条件可知:
T型杆水平移动距离:

设杆件OD=140mm,则有上述式子可得OB=105mm,即连杆的两杆在初始位置垂直的情况下,如果满足设计要求需要连接T型杆的长度为105mm,连接销轴分支的杆的长度为140mm。
滑杆长度分析。
AG杆:
AG杆上滑块在整个过程中运动的上下距离为BC。
BC=OB-OAcosa=OA-OAcosa=OA(1-cosa)
我们设计滑杆的长度为189.8mm>35.55mm。所以说满足要求。EP杆:
EP杆上滑块在整个过程中运动的上下距离为EF。
EF=OE-ODcosa=OD-ODcosa=OD(1-cosa)
我们设计滑杆的长度为120mm>47.40mm,满足要求。转动杆的尺寸设计示意图如图8。

图8 转动杆尺寸设计示意图
2.3.3 驱动方式的选择
常用的驱动方式主要有液压驱动、气压驱动、电气驱动和电磁驱动四种基本类型,四种主要的驱动方式比较如表1所示。

表1 驱动方式的比较
该机构要求质量轻便,体积小,并且不能影响电瓶车的运输能力。综合考虑以上驱动方式均不能达到要求,经过多方比较我们决定用电磁铁作为该机构的驱动装置。
2.4 T型杆设计
T型杆整个装置中起到传递运动状态的作用,物料车前端推杆推动T型杆,T型杆把这个运动传递给滑块,引起滑块的变速圆周运动。进而实现变形销轴的直线运动。T型杆尺寸图如图9所示。

图9 T型杆尺寸图
2.5 滑块的设计
滑块的运动轨迹为圆周,滑块管状通孔与T型杆的下端过度配合。在运动过程中,滑块相对于T型杆做直线运动。为了保证运动的精确,滑块的尺寸精度要求相对较高,尺寸如图10所示。
2.6 箱体的设计
根据机构的尺寸设计箱体的尺寸,箱体是机械产品重要组成部件,它是传动零件的几座,应具有强度和刚度。箱体通常用灰铸铁制造,灰铸铁具有很好的铸造性能和减震性能。为了便于轴系部件的安装和拆卸,箱体制成沿轴心线水平剖分式。上箱盖和下箱体用螺栓连接成一体。箱体和箱体盖的立体图如图11~12所示。
根据整体设计结构图,设计箱体,由于该装置要求数量小,考虑到它的经济性。
3 运动仿真
采用UG软件建立了实体模型并进行虚拟装配,运用运动仿真功能进行了连杆机构的仿真设计,仿真效果如图13所示。
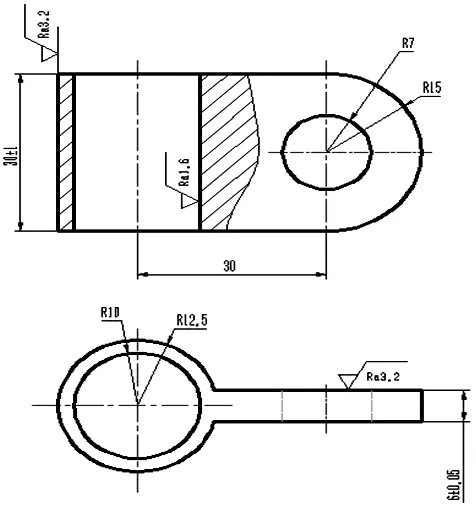
图10 滑块尺寸图

图11 箱体
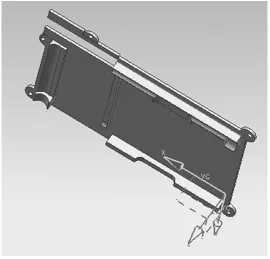
图12 箱盖

图13 连接装置运动仿真图
4 结语
确定了电瓶车连接装置设计方案,进行了连接装置原理分析,完成了推杆、T型杆、滑块、箱体等的结构设计和尺寸计算,并进行了运动仿真,仿真效果良好。电瓶车自动连接装置的设计解决了企业运输方面的技术难题,加强运输安全,提高劳动生产率。
[1]孙开元,骆素君.常见机构设计及应用图例[M].北京:化学工业出版社,2010.
[2][日]腾森洋三.机构设计[M].北京:机械工业出版社,1985.
[3]张桂香.机电类专业设计指南[M].北京:机械工业出版社,2004.
TD524
A
1004-7344(2016)24-0309-03
2016-8-7
周凤敏(1977-),女,汉族,山东临清人,讲师,硕士,主要研究方向为机电一体化技术专业。
猜你喜欢
机械管理开发(2021年10期)2021-10-21
装备制造技术(2021年4期)2021-08-05
煤矿机电(2020年5期)2020-11-02
煤矿现代化(2020年3期)2020-05-13
妇女(2019年5期)2019-07-02
当代工人(2018年16期)2018-12-01
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中国核电(2017年1期)2017-05-17
小小说月刊·下半月(2013年10期)2013-05-14
