如何实现成都地铁4号线ATO模式下列车停车精度的提高
2016-08-16 03:28张扬
大科技 2016年17期
张扬
(成都地铁运营有限公司 四川成都 610000)
如何实现成都地铁4号线ATO模式下列车停车精度的提高
张扬
(成都地铁运营有限公司 四川成都 610000)
城市轨道交通不断发展的过程中,列车自动驾驶ATO模式已获得了广泛的应用,列车运行的可靠性得到保证,同时列车进站停车的精确性控制也受到广泛关注。本文结合成都地铁4号线ATO模式下的停车控制原理,在明确列车实际运行状况的前提下,对影响列车停车精度的因素进行了分析,提出了针对性策略。
ATO系统;停车精度;方法探究
在无线通信技术发展的过程中,城市轨道交通广泛应用ATO(列车自动驾驶)模式运行,降低操作人员的工作强度,提高列车运行的精准性[1]。在ATO模式运行情况下,列车的操作人员不参与进站停车,必须保证列车进站时准确停靠在站台,如果停靠位置出现偏差,列车将不能准点运行,也影响乘客上下车。成都地铁4号线列车自开始信号ATO调试以来,发现列车的运行曲线中普遍存在5km速度时,电空转换中气制动跟不上控车曲线的情况,导致ATO控车情况下有冲标的问题。为此信号的控车模型采取了前移制动曲线的方法,避免气制动跟不上的问题。本文针对ATO运行模式下列车精度控制的问题,解析该解决措施。
1 ATO模式下列车停车控制原理
ATO控制系统的重要功能是要实现列车在车站精确停车,控制过程主要分为四个阶段:
①应用VATP(Vehicle Automatic Train Protection,车载列车自动防护)系统实现对列车行驶速度的测定。为了测定列车的行驶速度,将多普勒雷达安装在列车底部的车轴上,实时监控个列车的行驶速度,将数据记录下来,便于对速度进行控制。
②安装在列车底部的信标读取器及时准确地获得轨道线路中的信标信息,实现对列车的精准定位。信标装置中包含列车的位置信息,装置的工作频率一般控制在2.4GHz,信标装置可以及时将区域位置信息和列车位置信息等传递到VATC(Vehicle Automatic Train Control,车载列车自动控制)系统中。
③VATP系统中包含详细的轨道线路信标,及时获取列车的精准位置,在测速系统的帮助下实现对列车的精确定位,之后应用TWC(Train to Wayside,轨旁通信)系统将详细的位置报告发送到RATP(Region Automatic Train Protection,区域列车自动防护)系统中,在RATP系统的帮助下,RATO(Region Automatic Train Operation,区域列车自动运行)系统可以准确获得列车的所有信息,列车行驶过程中,可以及时读取信标信息,并对位置信息进行更新。
RATO系统将列车运行位置信息和进站信息准确地传输到VATO(Vehicle Automatic Train Operation,区域列车自动运行)系统中,VATO系统实现列车的准确定位,并获取位置、速度与停靠站信息,应用精确的位置信息确定出车站停车减速曲线。图1是车站停车减速曲线。

图1 车站停车减速曲线
2 影响停车精度的主要因素
2.1 列车速度测量精确性的影响
为了提高列车停车精度,需要对列车运行的瞬时速度和加速度进行精确测量。针对轨道列车而言,为了确定出牵引力或者制动力,需要借助车载信号系统去顶列车的运行速度和运行加速度,得出列车运行曲线,列车实际运行过程中借助测速电机和多普勒雷达精确测出列车速度,保证列车展厅进站停靠精度满足标准,提高列车运行曲线的准确性。
2.2 列车位置定位精确性的影响
对列车定位的精确性影响到列车进站和停车的精确性,如果不能对列车运行速度和运行位置进行准确定位,将无法应用可靠的算法判断列车的停靠位置,列车定位需要借助轨道信标和车载信标,因此列车精确定位的关键救治信标的布置位置和、布置密度和信标数据的精确性。
2.3 车载ATO系统软件算法的影响
在列车速度判断和列车定位都十分精确的前提下去,如果软件系统出现故障或者算法不当,将导致绘制出的列车运行曲线不够精确,列车进站和停靠位置的精确性不能保证,因此ATO运行模式下的软件系统算法也成为影响列车进站停靠精度的重要因素[2]。
3 ATO运行模式下提高停车精度的方法
在分析ATO系统停车控制原理的基础上,明确影响列车进站停靠精确性的因素,需要在三个方面进行精确性设计,将成都地铁4号线列车进站停靠精度误差控制在±3cm范围内。
3.1 提高测量列车速度的精确性
列车进站停车控制的过程中,列车进入到制动工况,在制动过程中可能出现列车车轮打滑和空转的现象,测速电机测定的列车速度也会出现较大的误差。实际设计过程中,需要先保证VATC系统设备的运行效益,列车运行是及时获得位置信息,将多普勒雷达输入的速度信息与测速电机测定的速度信息进行比较,如果两组速度信息误差超过允许的范围时,VATC系统将会自动判断出车辆位于打滑或者空转状态,此时也会自动屏蔽掉测速电机的数据,默认多普勒雷达测定的数据为精确值,此时可以保证系统采集到准确的列车位置和速度信息,通过软件计算后得出更加精确的速度曲线。
3.2 提高列车定位的精确性
列车定位的实现需要借助对轨道交通线路中信标的读取,在实际设计过程中,为了提高列车定位的精确性,需要注重以下两项内容:①提高信标内数据信息的准确性,帮助裂成更精确定位,同时保证VATC系统绘制出更精确的停车曲线;②提高车站区段内信标设置的密度,以减小停车距离的误差,完成更加精确的停车口标[3]。
3.3 改进软件算法
软件设计的过程中,ATO运行模式确定出列车运行速度,并及时确定出控制算法。起始时刻将口标的巡航速度设置一个偏移值,偏移值一般为3~5km/h,偏移值低于ATP强制执行保证乘坐质量的限定速度。偏移值的设定可以保证列车停靠过程中有一定的时间缓冲,可以实现到达指定位置时偏移值的调整。如果列车保持较低的限定速度进入到车站区段时,在距离下一个区段足够远的位置,及时将口标巡航速度降低到保证乘坐质量的限定偏移值速度内,以此实现对列车速度的控制,并且在到达下一区段之前,可以经列车减速到规定的口标速度。另外也可以按照实际速度的超出情况借助紧急制动曲线实现对距离的调整,避免出现超速问题。
如果口标巡航速度出现变化时,可以按照控制算法进一步明确列车的加速度和冲击率,实现对速度的调整控制,直到实际速度满足口标巡航速度的要求。在列车进入到站点区段的情况下,可以将控制速度曲线与停车曲线合并,图2绘制出列车进站停车过程中速度、加速度和距离关系曲线。
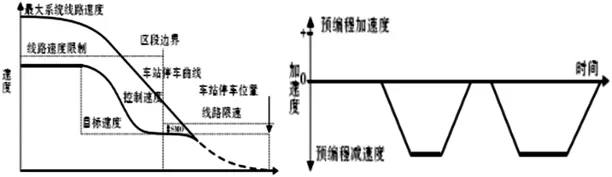
图2 停车速度、加速度和位置的关系曲线
明确设计标准之后,对精确度的影响因素进行分析,对不同的系统进行单独调试并测试结果,寻求最佳方案,去顶出调试步骤,先对列车空气制动系统的预压力进行调整,列车制动过程中空气制动的预压力下降,由原来的30kPa调整为20kPa,考虑到列车存在的欠标问题,预压力调整的过程中空气制动延迟200ms,以保证列车有充足的制动距离。如果通过调整预压力的方法不能解决实际问题,之后可以对牵引系统进行调整,明确制动完成值和反馈值的关系,如果其中暴露出问题,必须进行重新标定,并进一步优化电控转换的时序[4]。如果上述两种方法都不能解决问题,可以对信号系统进行调整。成都地铁4号线就是因为不能改善车辆电制动与气制动时序的情况下,作出了信号系统的调整。检测加速度计和速度传感器的工作状态,检查不同环节的输入输出是否存在问题,调整了检查软件系统中的控制算法,通过测试确定的气制动不及时量,重新计算确定信号控车曲线的前移量,从而达到精确控车的目的。应用上述方法后,对列车的制动特性进行验证,均可以满足列车停车精度要求。
4 结束语
城市建设不断发展的过程中,轨道交通对列车运行提出了更高的要求,列车应用信号控制系统的过程中,将重点放在ATO工作模式上,以提高列车进站停靠精度为主要目标。本文以地铁ATO运行模式下的站台停车精度控制为主要对象,分析了影响停车精确性的因素,提出针对性策略。实践表明,应用这些可靠的设计方法,可以进一步完善列车控制系统的调试,测试结果满足运行控制需求,可以保证列车停靠精度,提高列车运行的安全性和稳定性。
[1]于振宇,陈德旺.城轨列车制动模型及参数辨识[J].铁道学报,2011,33(10):37.
[2]刘贺文,赵海东,贾利民,等.列车运行自动控制(ATO)算法的研究[J].中国铁道科学,2014,21(4):138.
[3]宿帅,唐涛.城市轨道交通ATO的节能优化研究[J].铁道学报,2014,36(12):50.
[4]杨艳飞,崔科,吕新军,等.列车自动驾驶系统的滑模PID组合控制[J].铁道学报,2014,27(6):61.
U284.48
A
1004-7344(2016)17-0134-02
2016-6-1
张扬(1982-),女,工程师,本科,主要从事城市轨道交通信号维保方面工作。
猜你喜欢
铁道通信信号(2019年9期)2019-11-25
心理学报(2019年7期)2019-07-06
祖国(2018年6期)2018-06-27
阅读(科学探秘)(2018年8期)2018-05-14
铁道通信信号(2018年3期)2018-04-19
中国高新技术企业(2016年30期)2016-12-20
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
科技与创新(2015年12期)2015-07-21
水道港口(2015年1期)2015-02-06
铁路通信信号工程技术(2014年6期)2014-02-28