穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现*
2016-08-16 09:05杨俊飞朱兴元赵国如
现代机械 2016年4期
杨俊飞,朱兴元,赵国如
(1.武汉理工大学材料科学与工程学院,湖北武汉430070;2.中国科学院深圳先进技术研究院低成本健康重点实验室,广东深圳518055)
穿戴式跌倒护髋安全气囊系统自动充气机构的设计与实现*
杨俊飞1,朱兴元1,赵国如2
(1.武汉理工大学材料科学与工程学院,湖北武汉430070;2.中国科学院深圳先进技术研究院低成本健康重点实验室,广东深圳518055)
跌倒往往在不可意料的瞬间突然发生,且经常给人造成较大伤害,因此跌倒检测与防护变得尤其重要。利用充气气囊作为缓冲来减轻伤害是目前跌倒防护最有效的手段。研究的目的是为跌倒防护安全气囊设计成本低、重量轻、体积小、速度快的充气机构。充气机构凸轮轮廓的推程被设计为正弦规律加速度曲线,通过对机构结构的受力分析计算得出充气机构对刺针的推力;对分别存储8 g、12 g、16 g的CO2的多个气瓶进行了冲刺试验验证了充气机构能可靠地刺穿气瓶;用高速动态记录仪测得该充气机构给气囊充满气的平均时间为386.9 ms。该充气机构体积小、重量轻、充气快速可靠,不仅适合用于穿戴式跌倒髋防护安全气囊,也为设计其他多种形式的摔跌防护装置提供了参考。
充气机构凸轮跌倒保护自动充气
0 引言
跌倒对老年人的健康构成了严重威胁,每年超过三分之一的65岁以上老人发生过跌倒,甚至是我国该年龄段老人意外伤害死亡的首要原因[1-3],各国学者在跌倒检测方面做了大量研究,取得了不少研究成果,但是跌倒保护方面的研究并不是很多。在国外,日本千叶大学的研究人员[4]设计的穿戴式跌倒防护气囊的充气机构采用点燃火药熔穿气瓶从而使得气体释放为气囊充气,其优点是速度快,能在120 ms内将气囊充满,缺点是不便于重复使用,且火药具有较大的危险性;在国内,香港中文大学学者[5]设计的跌倒髋骨保护气囊系统采用舵机带动阀门将压缩弹簧的弹性势能释放来刺穿气瓶,其能在333 ms内将气囊充满,充气较快,缺点是充气机构复杂且不便于重复使用; 郑州大学的翁恒等人[6]设计的一种自动保护呼救的人体智能气囊,其充气机构采用了硝酸铵的爆炸分解产生的气体来对气囊进行充气,其优点是能在110 ms以内快速完成充气,缺点是较危险且噪音高达130 dB;武汉理工大学的姚冕等人[7]设计的穿戴式跌倒预警防护系统的充气机构使用舵机带动连杆机构再带动连杆凸轮推动刺针刺破气瓶的方式来实现气囊的充气,舵机通过逆时针旋转刺破气瓶,再反向旋转拔出刺针释放气体,优点是便于重复使用,缺点是充气速度慢,且机构较复杂、体积较大。
上述充气机构充气快的多具有较大的危险性,同时成本也较高、不便于重复使用;便于重复使用的,往往充气机构复杂、充气速度较慢。鉴于以上问题,本文针对跌倒防护智能穿戴气囊设计了低成本、小体积、重量轻、便于重复使用的充气装置。
1 主要方案设计
本文设计的充气机构主要由原动部分、传动部分、执行部分和气源等组成,如图1所示。

图1 充气机构示意图
1.1气源
采用二氧化碳高压储气瓶用作气体发生器的气源。由于用于跌倒防护穿戴设备,气瓶在撞击情况下的安全性能非常重要。本装置选用的气瓶瓶身为特种钢,瓶口用铝合金密封,气瓶直径18 mm,长度66 mm,内装8 g二氧化碳气体,刺穿力220 N~260 N。经过500次20 m高度坠落测试,没有出现爆炸或漏气情况。
1.2原动部分
跌倒预警器检测到跌倒发生时,跌倒防护系统发出信号激发充气装置给气囊充气,在人体与地面间形成缓冲层从而对人体特定部位实现保护。为了便于控制,我们考虑选用伺服电机。由于瓶口铝合金的剪切强度较大。即使经过传动机构对传动力进行了放大,对伺服电机的要求依然较高。考虑到低成本及可靠性,通过对多种舵机进行多次试验测试,我们选用了运行稳定可靠、输出力矩大奥松RB-150CS舵机。该舵机全金属齿轮,重量仅为56 g,扭矩达到1.5 N·m,规格为40.8 mm×20.1 mm×38 mm,能实现360°连续旋转,而且价格较低。其工作电压为4.8 V~7.4 V,随着电压升高,其输出扭矩和转速都有所提高。
1.3电池
电池用于给舵机供电。由于刺穿气瓶时负载较高,需要的瞬时功率较大。经过反复测试对比,最后选用了续航强、体积小、安全可靠的18350航模锂电池,为了让舵机获取最大的输出扭矩及输出转速,电池电压选用7.4 V。
1.4传动部分
传动机构是充气机构的重要组成部分。它将舵机的转动运动转换成刺针的直线运动,同时对输出的力进行了放大,刺针刺穿气瓶后返回原位,使得气瓶中的二氧化碳通过小孔迅速溢出给气囊充满气。在参考多种充气机构的基础上,我们对结构原理进行了深入分析,最后选定了凸轮机构。推程时将凸轮轮廓的压力角控制在20°左右,使得刺针具有大的推力同时具有较快的速度。回程压力角设计为80°,便于刺针在刺穿气瓶后迅速回程,方便气体从气瓶释放。
1.5执行部分
执行部分主要是刺针,刺针在凸轮推杆的作用下刺穿气瓶,并在弹簧的作用下迅速回复到原来的位置,使得气体迅速释放将气囊充满。对于易跌倒对象,可能会常常发生跌倒,因此刺针需要反复多次刺穿气瓶后依然能保持锋利,这对刺针的硬度和耐磨性都有较高要求。在刺针的选材方面,我们选择了Cr12MoV模具钢。Cr12MoV钢的特点是具有高的耐磨性、淬透性、微变形[8],能较好地满足刺针的使用性能。
2 充气装置整体结构及工作原理
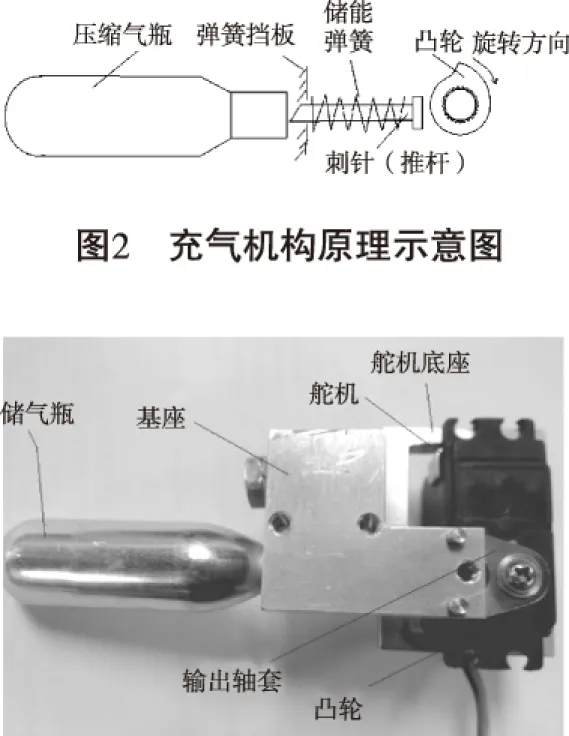
图3 充气机构实物图
充气机构的原理示意图如图2所示,样机实物图如图3所示。舵机的输出轴与凸轮连接,当检测到跌倒发生后,控制系统给舵机发送顺时针旋转的信号波,舵机带动凸轮旋转,随着凸轮旋转,刺针直线运动刺破气瓶,同时弹簧储存能量,凸轮继续旋转一个小角度,由于回程角度较大,刺针迅速回到初始位置,气瓶通过小孔迅速放气,舵机带动凸轮继续旋转一圈到达初始位置,便于更换气瓶后继续对穿戴对象进行跌倒防护。整个机构重量为135 g,规格为59 mm×50 mm×50 mm,总体质量较轻、体积较小。
3 凸轮机构设计
3.1刺针运动规律的选择
刺破气瓶时刺针的运动速度较高。正弦规律加速度曲线在全程中速度和加速度都没有突变,在行程的始末加速度值为0,因此运动机构无冲击、噪音小,较适用于该充气机构的设计。
正弦规律加速度曲线推程方程为:(0≤φ≤Φ)
(1)
3.2压力角和基圆半径的确定

图4 凸轮结构分析示意图
凸轮的基本参数不仅要满足刺破气瓶的基本动力传动要求,还要考虑整个机构的结构尺寸,选择合适的压力角和基圆大小,使机构在满足动力传动要求的情况下,结构紧凑、体积小、重量轻。
如图4所示为凸轮机构的结构分析示意图。其中e是推杆(刺针)的偏心距,s为推杆的推程,v是速度,α为压力角,r0是凸轮基圆半径。
(1)压力角
凸轮机构压力角为从动杆件所受到的作用力的方向和该点速度方向之间的夹角(如图4所示α)。推动推杆的有效分力F1=Fcosα。随着压力角的增大,有效分力逐渐减小,而摩擦阻力逐渐增大,导致凸轮机构更容易磨损,当压力角大到一定程度还会导致凸轮机构发生自锁。因此,压力角越小凸轮的动力传动性能越好,但是压力角越小结构会越大,凸轮在转速一定的情况下推杆速度也会随之变慢,因此压力角的大小需要有一个合适的范围。一般设计时压力角30°~40°,但是小电压情况下驱动舵机的输出扭矩无法达到很大,因此本文压力角范围选用15°~25°。
如图4所示,A点为凸轮和从动件的瞬时重合点,根据相对运动原理可得vA2=vA1+vA2A1,可推出压力角公式为:
(2)
(2)基圆半径
根据对凸轮有效作用力的分析,压力角越小传动的动力越大,但是获取小压力角的前提是凸轮轮廓曲线的曲率较小,这样基圆及其轮廓面积将会增大,导致结构变得笨重,因此设计时要合理选择参数。由公式(2)可推出基圆公式如下:
(3)
在进行参数确定时,基圆半径r0与压力角α存在矛盾,在工程设计中为了使凸轮的结构紧凑,在满足αmax≤[α]时,尽可能取小的基圆半径。设计凸轮时一般可根据经验初步确定基圆大小,基圆确定后对凸轮推程压力角进行校核。
3.3刺针推力计算
舵机的驱动力矩已知为Md,如图4所示,则:

(4)
根据刺针尖端长度设计了推程s为2.5mm,将偏心距设定为1mm,带入(2)式计算得α<20°,将α=20°,s=2.5mm,e=1mm带入(4)式可得到F1=547.4N,超过气瓶额定刺穿力220N~260N的两倍,因此认为设计可靠。
4 试验
4.1充气可靠性验证

图5 充气测试实物图
充气试验的测试装置如图5所示。试验气瓶和试验后气瓶瓶口情况如图6所示,从左到右依次是8 g、12 g、16 g的气瓶。每种规格的气瓶分别随机选取不同厂家生产的气瓶各50个。每一次实验前测量电池电压,确保电池电压不低于7.2 V。试验结果如表1所示。
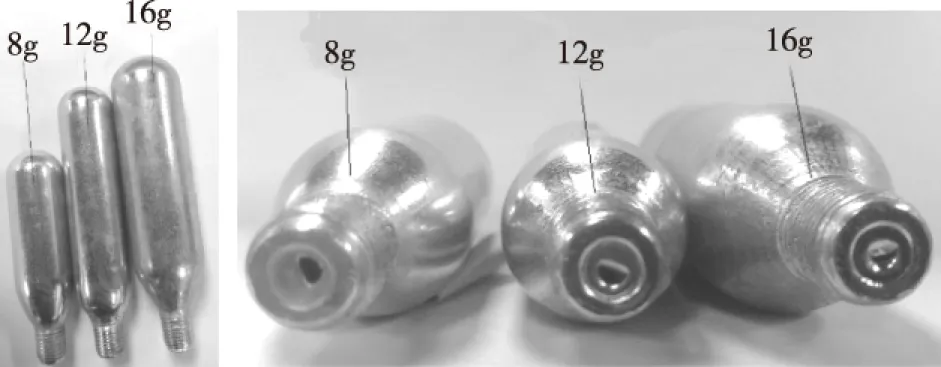
图6 测试气瓶和试验后瓶口

表1 不同气瓶充气测试
测试结果显示,针对8 g、12 g、16 g等不同规格容量的气瓶,气瓶被被刺破的成功率为100%,表明该机构不仅适用于8 g气瓶,对于刺穿12 g、16 g等其他规格容量的气瓶也同样可靠。
4.2充气时间测量

图7 充气前和充气后
由于人体跌倒的时间极短,充气机构的充气速度即跌倒缓冲气囊能否在跌倒前打开气囊从而保护人体至关重要。充气时间测量试验采用的主要设备如图7所示。
通过大幅翻动跌倒预警器(模拟人佩戴跌倒预警器时的跌倒预警器的动作情景)触发充气机构动作,充气机构刺穿气瓶后,气体通过导气管进入到腰包式跌倒保护气囊使折叠的气囊展开。整个过程采用高速动态记录仪记录(TroubleShooter 1000LE)。记录充气机构从开始动作到气囊充满的时间作为充气机构的充气时间。整个试验重复20次取平均值。试验记录如表2所示。

表2 充气机构的充气时间检测数据
平均充气时间:ta=386.9 ms
标准差:σ=18.5
同样,我们用该高速动态记录仪测量了模拟较快的跌倒过程,经多次测量,人体从开始跌倒到倒地过程大概0.8 s。可见在检测到跌倒发生后,该充气机构有较为充裕的时间在人体倒地之前充满气。
5 结论
跌倒时人体从站立到倒地时间很短,穿戴式跌倒防护设备的重量和体积对其舒适性有较大影响。本文用正弦规律加速度方法设计了跌倒防护充气机构中凸轮的推程轮廓曲线,通过受力分析计算得出舵机最终传递给刺针的推力超过气瓶需要刺穿力的2倍,说明该充气机构动力可靠,并通过对三种类型气瓶的测试验证了充气的可靠性;使用高速动态记录仪测量从接收信号到气囊充满平均耗费的时间为386.9 ms,相较于人体从开始跌倒到倒地约800 ms的时间,有较为充裕的时间在人体跌倒倒地之前给气囊充满气为人体提供保护;本文设计的充气机构总体重量仅为135 g,规格为59 mm×50 mm×50 mm。总体来看本文设计的充气机构重量轻、体积小,充气可靠、充气速度较快,更换气瓶后可重复使用,成本低廉。这些特点有利于跌倒防护产品的研制及推广,对老年人的跌倒防护、保障老年人的身体健康具有重要意义。
[1]老年人跌倒干预技术指南.http://baike.baidu.com/link?url=jemY7EZ8kJYyviiZ44rBGTgNTVLXTVVp8zZ
uyPW4RephobJD6ozacf0aTBPlbsAMRJWHqfC4bV8SXtG
Sx3Ue0K.
[2]Zhao G R, Mei Z Y, Liang D, et al. Exploration and implementation of a pre-impact fall recognition method based on an inertial Body Sensor Network[J]. Sensors,2012,12(11):15338-15355.
[3]Liang D, Zhao G R, Guo Y W, et al. Pre-impact & impact detection of falls using wireless Body Sensor Network[C]//Proceedings of 2012 IEEE-EMBS International Conference on Biomedical and Health Informatics. Hong Kong: IEEE, 2012:763-766.
[4]Tamura T, Yoshimura T, Sekine M, et al. A wearable airbag to prevent fall injuries [J]. IEEE Transactions on Information Technology in Biomedicine, 2009, 13(6): 910-914.
[5]Shi G Y, Chan C S, Li W J, et al. Mobile human airbag system for fall protection using MEMS sensors and embedded SVM classifier[J]. IEEE Sensors Journal, 2009, 9(5):495-503.
[6]瓮桓,申圳,王振亚,周博.一种自动保护及呼救的人体智能气囊[J]. 信息通信,2012(6):67-69.
[7]姚冕,马英楠,高星,等. 基于惯性传感的穿戴式跌倒预警防护系统[J]. 集成技术,2015(5):69-77.
[8]吴晓峰,马坤,徐娜,等. Cr12MoV模具钢应用的主要问题与热处理研究进展[J].模具制造技术, 2009, 35(9): 55-62.
The design and realization of the auto-inflating mechanism for the wearable hip-protecting airbag
YANG Junfei, ZHU Xingyuan, ZHAO Guoru
Falls often happen unexpectedly and suddenly, and often bring heavy injures to people, therefore the fall detection and protection are very important. The airbag is the most effective way for fall protection at present. In this study, we designed a low-cost, light, small and quick-inflating mechanism for the fall protection airbag. Sine acceleration curve was applied to the rise travel of the cam of the inflating mechanism, and through force analysis we concluded that the force on the sting was 547.4N, which was more than twice the force needed to puncture the gas cylinder. We carried out puncturing tests on the gas cylinders with 8 g, 12 g and 16 g CO2respectively, and confirmed the reliability of the inflating mechanism. With a high speed dynamic recorder, we obtained the average time the inflating mechanism needed to fill the airbag(386.9 ms). The inflating mechanism is small, light, quick-inflating and reliable, suitable for the wearable hip-protecting airbag, and has provided reference for the design of other fall protection devices.
inflating mechanism,cam,fall protection,auto-inflating
TH21
A
1002-6886(2016)04-0005-05
国家自然科学基金(51105359)。
杨俊飞(1989-),男,武汉理工大学材料科学与工程学院硕士研究生,研究方向穿戴式防跌倒安全气囊的充气机构。
2016-02-29
猜你喜欢
制造技术与机床(2019年8期)2019-09-03
自动化学报(2019年6期)2019-07-23
劳动保护(2018年8期)2018-09-12
纤维复合材料(2018年4期)2018-04-28
精密制造与自动化(2018年1期)2018-04-12
电子制作(2018年1期)2018-04-04
制造技术与机床(2017年5期)2018-01-19
制造业自动化(2017年2期)2017-03-20
天津科技大学学报(2015年6期)2015-04-16
舰船科学技术(2015年8期)2015-02-27