
基于DRLink运动平台系统的数控模型与实验研究
2016-08-15 06:50杨咸启郭红兵
黄山学院学报 2016年1期
杨咸启,阚 石,宋 鹏,郭红兵
(黄山学院 机电工程学院,安徽 黄山245041)
基于DRLink运动平台系统的数控模型与实验研究
杨咸启,阚石,宋鹏,郭红兵
(黄山学院 机电工程学院,安徽 黄山245041)
控制工程综合实验系统(DRLink控制系统)具有软硬件控制系统模块化、开放式设计,具有很好的可重组性,可进行二次开发。平台集机械、电子、通讯、计算机等多种技术,其控制软件具有仿真技术、网络管理和远程控制功能。该平台适用于学生进行试验、创新与竞赛、课程设计和毕业设计,对于学生实践能力的提高有较大帮助。通过深入研究平台的运动模型,由传递函数出发,利用MATLAB进行时域分析,再通过调整运动平台的各组成部分的参数来得到相应稳定的控制系统模型。最后基于DRlink控制系统的仿真实验则通过铅笔画在纸上的图案记录下了二维平台在相应特定指令下的工作轨迹。
控制工程综合实验;运动图形;数控技术;工程应用
1 二维运动平台介绍
运动平台被广泛应用于IC制造以及MEMS制造以及生物医学等行业。随着IC制造中芯片光刻与封装、MEMS器件封装及组装、生物医学中的点样移液、精密工程中的超精加工以及精密测量等领域的发展,人们对运动平台的定位精度提出了越来越高的要求。近年来,我国大力发展信息产业,IC制造也得到了迅猛的发展,但芯片产业的装备难以达到世界先进水平。因此,应用于IC制造过程中的硅片制造、芯片制造、芯片封装等关键环节的精密运动平台就成为当前IC制造装备中的关键部件。由于IC制造业发展迅速,IC集成度日益增高,芯片尺寸、引线间距、焊盘直径持续减小,内部结构越来越复杂,因此对平台的定位精度也提出了极高的要求,目前要求的定位精度已经达到微米级甚至纳米级。同样,在MEMS制造、微纳测量等众多领域都需要高精度运动平台。而运动平台的标定是研制高精密运动平台的必要环节。平台标定技术已成为平台制造的重要问题。随着高精密运动平台技术的快速发展及广泛应用,人们对运动平台的标定有了越来越高的要求。而目前国内大多采用静止标定的方法进行标定,无法适合于某些场合的要求。标定技术很大程度的影响着高精密运动平台技术的发展。所以,运动平台标定技术的深入研究对运动平台技术的发展具有重要意义[1-9]。
2 二维运动控制实验平台
2.1二维平台的组成
二维运动控制实验平台通过计算机中安装的运动控制器,由DRlink控制来实现运动实验平台X、Y方向的运动来达到各种实验目的。二维平台运动平台大致可以分为以下几个部分。
1.机械装置:简单的说就是由二个一维数控工作平台的机械装置,通过这二个一维机械装置的运动,来完成一个平面内的二维运动。
2.传感装置:传感装置是对二维平台运动状态进行测量、监控和反馈。a.限位传感器:实际上就是限位开关,用来检测运动平台是否超过限定位置。b.光栅尺:可用作直线位移或者角位移的检测。其测量输出的信号为数字脉冲,具有检测范围大,检测精度高,响应速度快的特点。c.是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
3.执行装置:将得到信息转化为力,以驱动机械装置运动部分,工作台的执行装置一般为步进电动机或交流电动机。
4.控制装置:是对系统的控制信息和来自传感器的反馈信息进行处理,并向执行装置发出动作指令。
2.2DRLink二维平台软件
二维运动平台的运用软件是“DRLink可重构计算机自动控制实验平台”,打开软件进入下图界面,如图1[9]。

图1 软件界面
由“开始实验”初始化PCL运动控制卡,设置正确的X、Y轴运动参数,然后点击驱动X轴、驱动Y轴试运行平台。调试好以后进入下图的数控代码脚本的编程实验,如图2。
利用数控代码脚本编辑器控件,编写或者读取已经编写好的程序脚本,编写完成后保存好脚本,然后在上图界面中选择刚刚编辑的脚本,最后点击开始运行执行程序。

图2 数控输入软件界面
3 运动平台的控制模型
3.1运动平台的物理模型
运动平台的物理模型包括:机械装置、传感装置、执行装置、控制装置,如图3所示[10-17]。
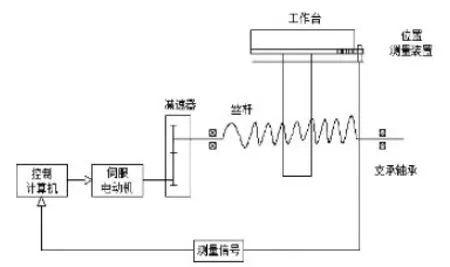
图3 系统物理模型
3.2系统控制模型
上面分析了系统的理论模型,下面借助传递函数来分析系统的运动规律。二维工作平台根据控制指令,伺服电机驱动丝杆转动,再带动工作台的移动。工作台上的检测仪器测量出移动位置信号反馈给控制系统,系统给出下一个动作指令。选择被控对象是工作台,控制器由计算机、电动机等组成,测量由传感器完成。系统中各部分的控制方程分为工作台动力学方程、减速器特性方程、伺服电机电压方程、机电转化方程。系统的传递函数框图如图4。

图4 系统的传递函数框图
由上面的传递函数框图可以得到系统在共同作用下的输出为:

显然,闭环系统的特性方程为:

因此,只要a0≥0,闭环系统就一定稳定。
系统在扰动R(s)作用下的闭环传递函数为:

系统在只有输入Xi(S)作用下的闭环传递函数为:

3.3时域模拟分析
时域分析是分析控制系统的一种分析法,它根据所研究的系统的传递函数或者微分方程,求出系统的输出量随着时间的变化而变化的规律。并由此用来研究系统的相关性能。当然研究系统还有其它的方法,例如频域分析法、根轨迹法。这里在研究二维运动平台控制系统时用了时域分析法来分析。
MATLAB程序设计语言可以更快捷、方便地对控制系统进行时域分析。下面具体来分析二维运动平台控制系统。
由MATLAB得到系统的阶跃响应:
在MATLAB中执行以下程序:
n=[1.3];
d=[1,666.7,380,1.26];
sys=tf(n,d);
figure(1);
step(sys)
程序执行结果如图5。

图5 系统阶跃响应
由系统的阶跃响应分析可以得到,在该参数估计值之下的系统处于过阻尼状态,系统的动态特性为单调变化的曲线,没有超调量和振荡,但调节时间比较长,系统的反应比较迟缓。不利于二维运动平台的工作,所以参数值估计不合理,需要重新进行调整。
在MATLAB中执行以下程序:
n=[10];
d=[1,80,31.4,10];
sys=tf(n,d);
figure(2);step(sys)
程序执行结果如图6。

图6 调整后的系统阶跃响应曲线
由调整后的参数值得到的系统阶跃响应分析可以得到该系统处在欠阻尼状态下的最大超调量比较小,说明系统的平稳性较好。调节时间较短,系统的调节比较快。所以在调整参数值以后得到的系统比较稳定。
4 实验项目研究
二维运动平台的运用软件是“DRLink可重构计算机自动控制实验平台”,打开软件进入图1界面。点击“开始实验”初始化PCL运动控制卡,设置正确的X、Y轴运动参数,然后点击驱动X轴、驱动Y轴试运行平台。调试好以后进入图2的数控代码脚本的编程实验。在数控代码脚本编辑器控件,编写或者读取已经编写好的程序脚本,编写完成后保存好脚本,然后在上图界面中选择刚刚编辑的脚本,最后点击开始运行执行程序,二维平台开始工作。
4.1环形花瓣图形运动实现方法
对于图7所示的环形花瓣图形,需要采用定位、圆弧插补等方法来实现运动控制。数控编程如下。

图7 环形花瓣图形
G00X0Y0/快速定位至原点/
G03X8.33Y-42.18R27/圆弧插补/
G02X13.05Y-31.25I10.69K-36.72
G03X17.78Y-20.32I15.41K-25.79
G02X0Y0I26.69K5.23
G03X24.35Y10.01I3.21K26.81/绘制第二个花瓣/
G02X33.76Y2.76I29.29K6.69
G03X42.70Y-5.11I38.23K-1.18
G02X0Y0I23.29K13.66
G03X-2Y26.25I-24.5K11.34/绘制第三个花瓣/
G02X7.81Y32.96I2.69K29.92
G03X18.05Y39.03I12.93K35.99
G02X0Y0I-5.8K26.37
G03X-25.59Y6.21I-18.35K-19.8/绘制第四个花瓣/
G02X-28.93Y17.61I-27.63K11.8
G03X-31.54Y29.23I-30.23K23.42
G02X0Y0I-26.87K2.64
G03X-13.84Y-23.19I13.16K-23.57/绘制第五个花瓣/
G02X-25.69Y-22.07I-19.76K-24.74
G03X-37.55Y-20.96I-31.62K-21.52
G02X0Y0I-10.81K-24.74/圆弧插补并返回原点/
M02/程序结束/
执行过程如图8。

图8 平台执行的过程
4.2鱼形图运动实现方法
对于图9所示的鱼形图,需要采用定位、圆弧插补、直线插补等方法来实现运动控制。数控编程如下。
G01X0Y0;/快速定位至原点
G02X10.84Y15.07R24.94;/圆弧插补绘制鱼身/
G02X26.08Y21.41R42.32;/圆弧插补绘制鱼尾/
G02X62.75Y14.77R48.08;
G02X73.56Y-3.8R23.37;
G02X106.68Y13.11R39.59;
G03X106.68Y3.6R5.86;
G02X106.68Y-5.44R6.72;
G03X106.68Y-11.97R5.09;
G02X107.91Y-21.12R7.58;
G02X73.56Y-3.8I106.31K18.44;
G01X89.82Y2.54;/直线插补绘制两条直线/
G01X73.56Y-3.8;

图9 鱼形图图形
G01X88.76Y-7.83;
G01X73.56Y-3.8;
G02X70.43Y-14.37I50.15K-2.63;/圆弧插补绘制鱼身/
G02X71.19Y-20.3335.47K-21.83;/圆弧插补绘制鱼鳍/
G02X70.75Y-26.21I49.74K-21.7;
G02X69.01Y-28.34I68.35K-26.02;
G02X66.46Y-26.95I69.87K-23.72;
G02X62.58Y-22.5I87.74K-4.45;
G03X70.43Y-14.37I50.15K-2.63;
G02X62.58Y-22.5I50.15K-2.63;
G02X36.54Y-30.16I36.56K17.85;
G02X35.17Y-37.73I12.01K-29.64;
G02X32.46Y-38.26I33.68K-87.74;
G02X26.9Y-29.18I46.55K-23.4;
G03X36.54Y-30.16I36.56K17.85;
G02X26.9Y-29.18I36.56K17.85;
G03X34.42Y-3.55I-26.95K0.55;
G01X18.16Y-1.03;/直线插补绘制鱼眼/
G03X22.96Y3.77I18.16K3.77;
G01X20.56Y3.77;
G03X18.16Y6.17I18.16K3.77;
G03X20.56Y3.77I18.16K3.77;
G01X22.96Y3.77;/直线插补绘制鱼嘴
G03X18.16Y-1.03I18.16K3.77;
G03X16.08Y8.1I18.16K3.77;
G01X30.14Y14.85;
G03X10.84Y15.07I-6.77K-3.44;
G02X34.42Y-3.55I-6.77K-3.44;
G02X26.9Y-29.18I-26.95K0.55;
G02X6.58Y-19.17I33.61K10.07;
G01X23.13Y-9.62;
G01X0Y0;/直线插补并返回原点/
M02;/程序结束/
执行的过程如图10。

图10 平台执行的过程
5总 结
本文分析了二维运动平台的控制理论模型及基于DRLink的实验。由系统方框图以及传递函数出发来研究系统的稳定性。分析了系统干扰对系统的影响,以及通过估计系统的参数来研究系统的动态响应。通过不断的更改系统的参数观察系统的响应来大致得到系统达到一定要求稳定性的最佳参数值。然后做了二维运动平台在DRlink控制下的几个仿真实验,通过铅笔在纸上画出的图案来记录二维运动平台的运动轨迹。由于实验条件有限无法得到所确定的参数值在二维平台实际组装中的可行性。
通过研究不仅仅了解了DRlink和二维平台的使用,而且对于其在实际中运用也有一定的认识。对于二维运动平台本身在实际的生产加工中也起到重要的促进作用,特别是在数控精密加工中。二维运动工作台采用滚珠丝杠和直线导轨副传动,具有精度高,效率高,寿命长,磨损小,节能降耗,结构紧凑,通用性较强。数控精密工作台可广泛应用于激光焊接机,激光切割机,插线机,打孔机,涂胶机,机械手,搬运或运输生产线上,检测装置,射线探伤分析,应力分析等数控机床和实验设备上。随着电子、自动化、计算机和精密测试等技术的发展,运动平台是设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
[1]梁建民,王勇亮,潘春萍,等.运动平台计算机控制系统的设计与实现[J].工业控制计算机,2001,7:54-56.
[2]王基生,于平太,李莹,等.虚拟实验平台开发和应用的理性思考[J].现代教育技术,2010,2:136-139.
[3]肖坦.基于虚拟仪器的自动测试系统研究[D].北京:北京交通大学,2006:1-15.
[4]卢奂采.虚拟仪器技术的发展及现状 [J].自动化仪表,2001,22(11):1-3.
[5]秦树人.虚拟仪器一测试仪器从硬件到软件[J].振动测试与诊断,2000(3):12-14.
[6]严平.虚拟仪器设备的总线技术[J].上海计量测试,2002,29 (3):13-15.
[7]李慧琴,王玲,王栋,等.基于LabVIEW的平台平衡控制系统的研究[J].电气传动,2011(1)32-37.
[8]于建清,龚德俊,徐永平,等.步进电动机控制二维运动平台系统的软件设计[J].电机与控制运用,2008,35(3):41-45.
[9]何丽娇,张宪民,王宇华.二维定位平台的运动控制系统研究[J].机电工程技术,2008,37(01):11-14.
[10]杨咸启,聂学俊,王平,等.机械工程控制基础与应用[M].武汉:华中科技大学出版社,2013:36-80.
[11]杨咸启,常宗瑜.机电工程控制基础[M].北京:国防工业出版社,2005:42-52.
[12]董明晓,李娟,杨红娟.机械工程控制基础[M].北京:电子工业出版社,2010:92-100.
[13]薛东彬,刘有余.数控加工与工艺编程[M].武汉:华中科技大学出版社,2013:31-45.
[14]廖映华,杜柳青,黄波.机械电气自动控制[M].重庆:重庆大学出版社,2013:5-74.
[15]增孟雄,刘春杰,张屹,等.机械工程控制基础[M].北京:电子工业大学出版社,2011:185-205.
[16]冯勇,霍勇进.现代计算机数控系统[M].北京:机械工业出版社,1996:52-97.
[17]邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2007:35-68.
责任编辑:胡德明
Numerical Control Model and Experimental Study Based on DRLink Motion Platform
Yang Xianqi,Kan Shi,Song Peng,Guo Hongbing
(School of Mechanical and Electrical Engineering,Huangshan University,Huangshan 245041,China)
DRLink control system features modular and open design of software and hardware control system.Being reconfigurable,it can be redeveloped.The platform integrates many technologies in such fields asmechanics,electronics,communicationsandcomputerwithitscontrolsoftwarehavingsuch functions as simulation technology,network management and remote control.The platform can be used for experiments,innovation and competition,curriculum design and graduation projects,being very helpful in improving students’practical ability.This paper obtains a stable control system model by first exploring the motion model of the platform,then making a time domain analysis using MATLAB based on transfer function,and then adjusting the parameters of each part of the motion platform.Finally,simulation experiments based on the DRlink control system record the working trajectory of the two dimensional platform under corresponding specific instructions by pencil drawing.
comprehensive experiment of control engineering;motion graphics;numerical control technology;engineering application?
TH126
A
1672-447X(2016)03-0011-005
2016-01-10
黄山学院大学生创新创业训练计划项目(201310375016);安徽省省级示范实习实训中心项目(56-2011)
杨咸启(1957-),安徽枞阳人,硕士,黄山学院机电工程学院教授,研究方向为机械工程控制。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
水泥工程(2020年4期)2020-12-18
石油石化绿色低碳(2019年6期)2019-01-14
Coco薇(2017年10期)2017-10-12
Coco薇(2017年9期)2017-09-07
光学精密工程(2016年4期)2016-11-07
电测与仪表(2016年17期)2016-04-11
新疆钢铁(2016年3期)2016-02-28
科普童话·百科探秘(2014年9期)2014-09-16
小朋友·快乐手工(2014年4期)2014-08-16
