
三维激光扫描在文物建筑测绘中的应用研究
2016-08-09 00:50周克初
大科技 2016年6期
周克初
(山西天昇测绘工程有限公司 山西太原 030001)
三维激光扫描在文物建筑测绘中的应用研究
周克初
(山西天昇测绘工程有限公司 山西太原 030001)
三维激光扫描是一种新的测绘技术,凭借无接触、高精度和快速便捷的优势在文物建筑测绘中中获得了广泛的应用。本文结合三维激光扫描技术的应用原理,分析了具体的应用方法,对应用过程中的坐标转换和误差分析问题进行了探讨。
三维激光扫描;文物建筑;应用探讨
文物建筑的测绘可以为文物保护提供可靠的依据,成为现今文物保护的基本手段,是后续研究工作的基础。传统的测绘工作中常应用单点接触的方法,工作效率较为地下,测绘结果也没有同一的标准,很多情况下测绘精度无法满足要求,严重制约着测绘工作的进一步开展。三维激光扫描技术应用扫描、电子技术和信息处理技术,满足了文物建筑测绘工作快速、非接触、高精度的要求,被文物保护单位广泛采用,应用过程中的核心问题是要对坐标转换和数据精度进行评价,其中数据精度与测绘误差有着直接的关系。
1 三维激光扫描技术的应用原理
三维激光扫描技术的核心是对三维激光扫描仪的应用,可以将三维激光扫描仪看做是一台高速旋转的全站仪。将水平方向和竖直方向的步进角度成为步进距,在测绘的过程中,按照预先设定的步进距进行扫描,步进的过程中进行测距,及时接收回光强度,为不同的扫描点提供对应的明暗属性。一般在应用过程中都会内置CCD相机,在采集扫描对象的颜色信息后,分配到点对应的色彩属性上,将对应点的集合称为“点云”[1]。
图1为三维激光扫描的原理图,其中P扫描点,距离S已知。
根据三角函数的关系,可以求出扫描点P的测站坐标,表示为:
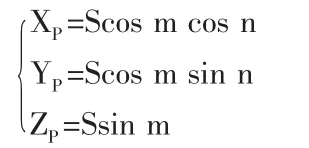

图1 三维激光扫描原理
文物建筑测绘工作中应用的激光扫描仪一般为气体激光扫描仪或者半导体激光扫描仪,波长范围一般为400~1200nm,实际应用中的颜色为绿色或者近红外。由于实际应用中测距方式的不同,将扫描方式分为脉冲式扫描和相位式连续扫描,测量中一般选用等角度的步进式测量方法,整体扫描形式有旋转棱镜式、摆动扫描式和旋转正多面式。
在实际测绘过程中,一般将测角精度控制在±25″,测距精度控制在±4mm,值得注意的是,实际激光波长、激光功率和反射率都会影响到最大测距的范围,扫描质量也会受到激光发散角的影响,针对现有的扫描设备的激光光斑,一般都标注在6mm@50m范围。
2 三维激光扫描技术的应用方法
2.1 应用综述
文物建筑内部具有较多的梁架,测绘过程中需要绘制建筑的平面图、立面图和剖面图,并且还需要建筑结构的大样图。在采集扫描数据的过程中,需要在测绘现场布设高密度和高精度的控制网,结合扫描设备和扫描对象的特点进行测绘。初步处理后的点云图需要现场校核,针对得出的初步结果,及时找出漏洞,再次扫描。针对无法扫描到的死角位置,可以应用手工的方法进行补测。由于点云图的识别能力不足,可以对建筑构建勾画出分块图的建筑纹理。在实际测绘中,结合文物建筑的特点,制定测绘技术路线,不同的文物建筑应用的测绘流程基本一致,测绘流程如图2所示。
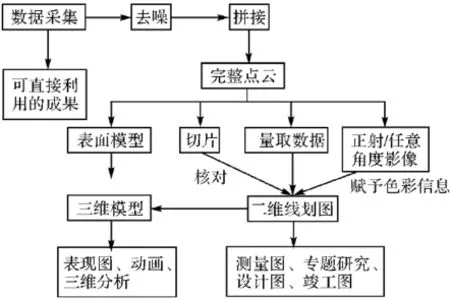
图2 三维激光扫描测绘流程图
2.2 外业数据采集
2.2.1 控制点的布设和测量
扫描质量直接受到控制点布设的影响,在实际测绘中,都必须保证三维激光扫描仪工作在最佳范围内,相邻控制点的距离必须小于扫描仪的最佳工作范围,以发挥最大的扫描效益。为了保证点云数据的完整性,将扫面站点之间的重叠度控制在20~30%。如果扫描方向与扫描对象之间存在夹角,为了降低测绘误差,必须保证控制点的扫描方向与建扫描对象垂直。
控制点选择的过程中还必须保证扫描的完整性和通视性,针对结构重叠、遮挡严重的扫描对象要尤其注意。针对高大的扫描对象,控制点需要布设在固定的升降机或者较高的位置上,保证扫描的完整性,同时保证控制点和其它控制点相互联系[2]。
控制点布设完成后,及时测量多个平面和高程,以扫描精度为准,严格控制测量精度。
2.2.2 三维全景扫描
先获得控制点的坐标信息,在已知的控制点上架设三维激光扫描仪,及时将靶标放置在不同的两站之间,再进行粗扫描,扫描过程中速度较快、范围较大,但是分辨率不足,需要在粗扫描的基础上再次测量,在相应区域内选好预定确定的分辨率进行扫描,相邻的两站之间需要有多个公共靶标。
2.3 内业数据处理
2.3.1 数据采集和去噪
数据采集的过程中包括去除非连接项和抽稀采样,采集的数据包括树木、道路和行人等非目标数据,需要及时删除,以期得到最标准的文物建筑数据。由于原始数据量较大,在计算机内占用较多的内存,对计算机处理数据的能力造成影响,因此必须对密集的原始数据进行剔除,这就是抽稀采样。
设备本身和环境的影响,导致采集的数据在红包含较多的不规则数据,称之为噪音数据,这些数据对测绘作业时没有作用的,必须进行去噪处理。
2.3.2 拼接
拼接的过程中需要将不同空间直角坐标系内的坐标进行科学的变换,将不同坐标系中测得的数据整合到一个坐标系中,将零散的分块统一起来,将测站的扫描数据连接在一起,对重叠数据进行处理[3]。
2.3.3 构建多边形三角网
拼接后的数据是多个密集点的坐标,为了形成文物建筑的表面模型,必须构造出多边形三角网。有时因为数据残缺,文物建筑的表面模型将出现一些孔洞,针对大范围的孔洞,不能进行后续的处理,必须及时进行补测。针对极小范围的孔洞,可以结合周围数据新进行填充,建立完整的三维魔心个,表现出更加直观的测量数据和建筑的纹理信息可以借助相片对建筑模型进行观察。
2.3.4 提取信息
文物建筑测绘的最终目的是要获取尺寸数据,得出正射投影图和等高线图等。针对单个构件的尺寸信息和测量数据,可以用点云处理软件获取文物建筑的模型数据,包括距离、面积和角度等。另外还需要绘制出建筑的剖面图三视图,在特征平面内建立建筑模型,再绘制出线化图,将建筑物立面的正射影投影在竖直平面和水平面上,以此得出三视图。
3 三维激光扫描技术应用中的关键问题
3.1 坐标转换
扫描对象无法在同一测站上完成扫描,需要将不同测站上的数据信息进行坐标转换,再将转换后的信息统一到同一坐标系中,这也是拼接过程中需要完成的重点内容,有时为了和大地测量坐标系相连,需要进行数据的“绝对定向”。
文物建筑有它固有的形式和风格,在扫描测绘的过程中,需要应用大量的扫描数据,为了实现对累积误差的控制,提高数据精度,实际应用中常采用单站拼接的方式、闭合导线的拼接方式和自由叠加拼接方式。
3.2 误差分析
误差控制是测绘作业中的重要工作,因此必须明确误差的来源。
3.2.1 控制网的误差
控制网的误差与测站点地理坐标有着直接的关系,后期模型的拼接误差直接取决于测站点的坐标误差,控制测量的精度与仪器精度和观测方法有着直接的联系。
3.2.2 扫描仪的误差
如果仪器本身存在性能缺陷,姜桂在脉冲信号的发射和处理过程中形成测距误差,扫描镜的误差和引擎非均匀转动的误差将导致测角误差[4]。
3.2.3 文物建筑本身特性的影响
不同的文物建筑,其表面材质和形状都会有较大的差异,因此反射特性也会存在较大的不同,信号的反射强度也会存在一定的差异,影响测绘精度。文物建筑表面装置凹凸不平,倾斜部分的平面发现不能与激光光束重合,将导致一定程度的位置偏差。
3.2.4 数据处理中的误差
数据处理过程中的去噪、拼接和建模都可能产生误差,例如在拼接过程中出现靶标拟合误差,不同的处理算法将出现不同的误差,另外,不同的应用软件也将产生不一样的数据处理结果。
3.2.5 环境因素的影响
扫描过程中由于风向、温度和气压等的变化对激光的传输造成影响,最终导致测绘结果的误差。
4 结束语
在文物建筑测绘精度要求逐渐提高的同时,三维激光扫描测绘技术也获得了广泛的应用。在实际应用过程中,需要做好对误差的控制。虽然在实际应用中还存在一定的问题,其高精度和简便快捷的优点会逐渐明显,也会在文物建筑测绘中开拓出新的空间。
[1]汤羽扬,杜博怡,丁延辉,等.三维激光扫描数据在文物建筑保护中应用的探讨[J].北京建筑工程学院学报,2011,27(4):18.
[2]郇小龙.三维激光扫描在文物建筑测绘中的应用[J].江西建材,2015(17):224.
[3]余海洋,史腊梅,熊朝晖,等.三维激光扫描在文物建筑测绘中的应用[J].内江科技,2015,36(2):10.
[4]白成军.三维激光扫描技术在古建筑测绘中的应用及相关问题研究[D].天津大学,2009,12(1):22.
TU198+.2
A
1004-7344(2016)06-0173-02
2016-2-10
周克初(1987-),男,助理工程师,本科,主要从事测绘工作。
猜你喜欢
金桥(2022年6期)2022-06-20
东方考古(2019年0期)2019-11-16
少儿美术(快乐历史地理)(2019年5期)2019-09-10
模具制造(2019年3期)2019-06-06
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
安徽地质(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
全球定位系统(2015年4期)2015-02-28
