
基于树莓派平台的智能盲人助手开发
2016-08-09 05:29张常友江西工程学院
电子制作 2016年14期
张常友 江西工程学院
基于树莓派平台的智能盲人助手开发
张常友 江西工程学院
【文章摘要】
【关键词】
树莓派;Arduino;GPS;定位
1.系统总体设计
系统的总体设计框图如图1所示。该系统通过超声波和GPS的数据采集,送入Arduino系统进行数据处理、编辑,然后通过RNF24L01传输到树莓派控制系统中,通过处理用震动和语音的方式提醒使用者,以便使用户能及时掌握周围的路况和环境。

图1 系统总体设计框图
系统选用树莓派和Arduino作为核心处理器是由其特点决定的,二者的主要特点是:Arduino系统使用的微处理控制器ATmega系列处理器,运行速度比较快,引脚分为Digital(0-13)和Analog(0-5)同时还配有6个PWM引脚,程序下载可支持ΙCS 和TX/RX。Arduino工作电压范围比较广(5V~12V),输出电压在3.3V~5V(DC)。树莓派是一款基于ARM的微型电脑主板,以SD卡为内存硬盘,采用BCM2835处理器,可以使用Linux操作系统,编程语言使用的python语言。
2.主要硬件电路设计
路况的探测是通过超声波来实现,产品共安装了6对超声波探头,来实现全方位,立体式的路况探测,将采集的数据送到Arduino系统进行处理,然后通过RNF24L01传输到树莓派进行振动和语言播报路况信息,硬件电路如图2所示。

图2 距离探测电路
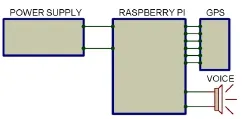
图3 MCU控制及其它电路

图4 主程序流程图
采用树莓派作为主要控制器,对路况信息和GPS、 GPRS采集到的信息进行处理,及时通过控制器以语言或震动的方式传递给使用者,同时通过GPS实时将行走路径记录并传输到互联网上,使用者的家人能通过微信或APP随时了解使用者的出行路径。使用者也可以通过设定的按钮随时通知家人自己的位置及当前的状态,并可以设置亲情电话,一键拨号给家人进行电话联系。另外还增加了一个报警功能:即使用者如果超过半小时开机待在某地没有移动和其他动作,系统将自动报警,同时将使用者的位置信息发给使用者家人,以便能及时了解使用者的当前情况。
3.系统软件设计
软件设计主要包括主程序、 GPS数据处理程序和超声波数据采集程序。主程序主要包括NRF24L01之间的通信、距离的采集、传输、接收等,主程序流程图如图4所示。数据采集、处理及传输,流程图如图5所示。

图5 判断障碍物
【参考文献】
[1]陈品洲.Arduino程序设计基础:北京航天航空出版社.2014-5
[2]程海英.陈勇.无线传感器技术系统的应用[j].中兴通讯技术.2008-1
[3]全球定位系统(GPS)测量规范GB/ T18314-2001.北京:国家质量技术监督局
[4]Maik Schmidt,Raspberry Pi A quick Start Guide,Progmatic Bookshelf,August 8,2012.
[5]Matt Richardson && Shawn Wallace,Start with raspberry pi,O‘Reily
[6]Media,December 7,2012 3 Christopher Hallinan,Embeded Linux Primer,Prentice Hall,September 18,2006
本系统以树莓派为网络链接和控制核心,Arduino用作数据处理中心。采用超声波探测路况信息,将接收到的路况数据通过Arduino做数据处理,然后用NRF24L01无线传输模块将处理好的数据传输到控制中心,通过振动和声音提醒盲人周围的路况情况。同时利用GPS模块和GPRS定位、记录行走路线,并实现一键报警和打电话,使用者的监护人可以利用微信或专用APP就能知道使用者的当前位置和行走路线。
猜你喜欢
——“永远跟党走”黄浦江两岸光影秀的总体设计考虑
照明工程学报(2022年3期)2022-07-30
——树莓
作文小学中年级(2022年5期)2022-06-02
现代计算机(2021年31期)2021-12-29
航天返回与遥感(2021年3期)2021-07-19
建材发展导向(2021年24期)2021-02-12
数字技术与应用(2019年9期)2019-12-13
电子制作(2019年11期)2019-07-04
日用电器(2019年12期)2019-02-26
电子制作(2017年17期)2017-12-18
电脑爱好者(2017年10期)2017-06-01
