
某链条拉式平衡机优化设计
2016-08-05 03:29鲁玉祥翟少波马明迪刘小蒙徐保成
中北大学学报(自然科学版) 2016年4期
关键词:优化设计
鲁玉祥, 翟少波, 马明迪, 刘小蒙, 徐保成
(西北机电工程研究所, 陕西 咸阳 712099)
某链条拉式平衡机优化设计
鲁玉祥, 翟少波, 马明迪, 刘小蒙, 徐保成
(西北机电工程研究所, 陕西 咸阳 712099)
摘要:针对某链条拉式平衡机设计效率低、 优化设计难度大的现状, 建立该类平衡机不平衡力矩数学模型并进行优化设计. 研究了该链条拉式平衡机的设计过程, 用直角坐标系中曲线方程描述链条几何位置, 建立了不平衡力矩的数学模型. 考虑各种使用工况, 建立平衡机优化设计目标函数和约束条件, 形成了平衡机优化设计数学模型. 基于SQP方法, 编制优化设计计算程序, 得到了优化设计结果. 该链条拉式平衡机优化设计结果表明:优化后不平衡力矩均降低, 将有效减低高低机手轮力、 随动功率, 且极大提高了设计效率.
关键词:链条拉式平衡机; 不平衡力矩; 优化设计; 逐步二次规划
大口径自行火炮大多采用气体拉式平衡机. 该类平衡机活塞杆铰接在摇架上, 平衡缸体铰接在炮塔上, 缸体及蓄能器内高压气体作用在活塞上产生抗力, 用于平衡起落部分对耳轴的重力矩. 某火炮因总体布局、 改善炮塔后顶部受力状况, 采用了链条拉式平衡机. 该链条拉式平衡机的平衡缸体水平固定在炮塔顶部; 挠性链条一头绕过安装在炮塔顶部的滑轮后, 连接到活塞杆, 另一头绕过并连接在固定在摇架上的曲线板. 调整曲线板的位置和形状, 可调节平衡机力对耳轴的力臂大小, 减小不平衡力矩.
在平衡机设计中, 减小不平衡力矩对随动调炮功率和高低机设计都具有重要的影响[1]. 但是在工程实践中, 由于多变指数影响, 往往很难消除不平衡力矩, 只能通过优化设计来减小不平衡力矩. 某链条拉式平衡机在起初设计时, 采用作图法求取链条几何位置、 长度和平衡机力的力臂等, 设计效率很低, 要运用优化算法进行优化难度更大. 本文用直角坐标系中平面曲线方程描述链条位置, 给出平衡力矩的解析表达式, 建立不平衡力矩的数学模型, 运用优化算法完成优化设计.
1不平衡力矩数学模型
某链条拉式平衡机结构示意图如图 1 所示, 曲线板固连在摇架上, 曲线板与链条的接触面是一段圆弧, 其圆心如图示.
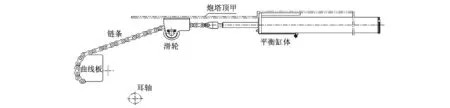
图 1 某链条拉式平衡机结构示意图Fig.1 Schematic of a chain equilibrator
1.1链条拉式平衡机设计过程
以链条链轮圆心连线l代表链条, 记链条绕在曲线板上时链轮圆心形成的圆为C1, 记链条绕在滑轮上时链轮圆心形成的圆为C2. 链条拉式平衡机作图法设计过程如下:
1) 选定某射角θb. 射角大于θb, l是C1和C2的公切线, 切点分别为A和B; 射角小于θb, l是射角θ0时的A点到C2的切线, 切点仍是B;
2) 依据经验初步给定某射角θb时平衡缸内径d1和活塞杆外径d2, 气压p1及容积W1, 计算活塞工作面积A, 容积相当长度S1,平衡力臂长h1;
3) 选定多个射角θi, 并初步给定相对压缩量Li1, 计算平衡机力Fpi;
4) 由力矩平衡, 求出理论平衡力臂hi;
5) 作图,对于某一射角θi,绕耳轴逆时针旋转C2; 若θi>θb,则求C2和理论平衡力臂圆的公切线;若θi<θb,则求射角θ0时A点与C2的切线;
6) 求上述公切线簇的包络线, 则该包络线为链条绕在曲线板上时链轮圆心的理论位置;

9) 用最小二乘法拟合包络线, 即得到C1.
1.2链条几何位置模型
以耳轴为原点, 建立直角坐标系. 记C1,C2圆心坐标分别为O1(a1,b1)和O2(a2,b2), D为链条挂点, O1A与O1D的夹角为θ1, BO2与y轴的夹角为θ2. 高射角和低射角时链条几何位置示意图如图 2 和图 3 所示.
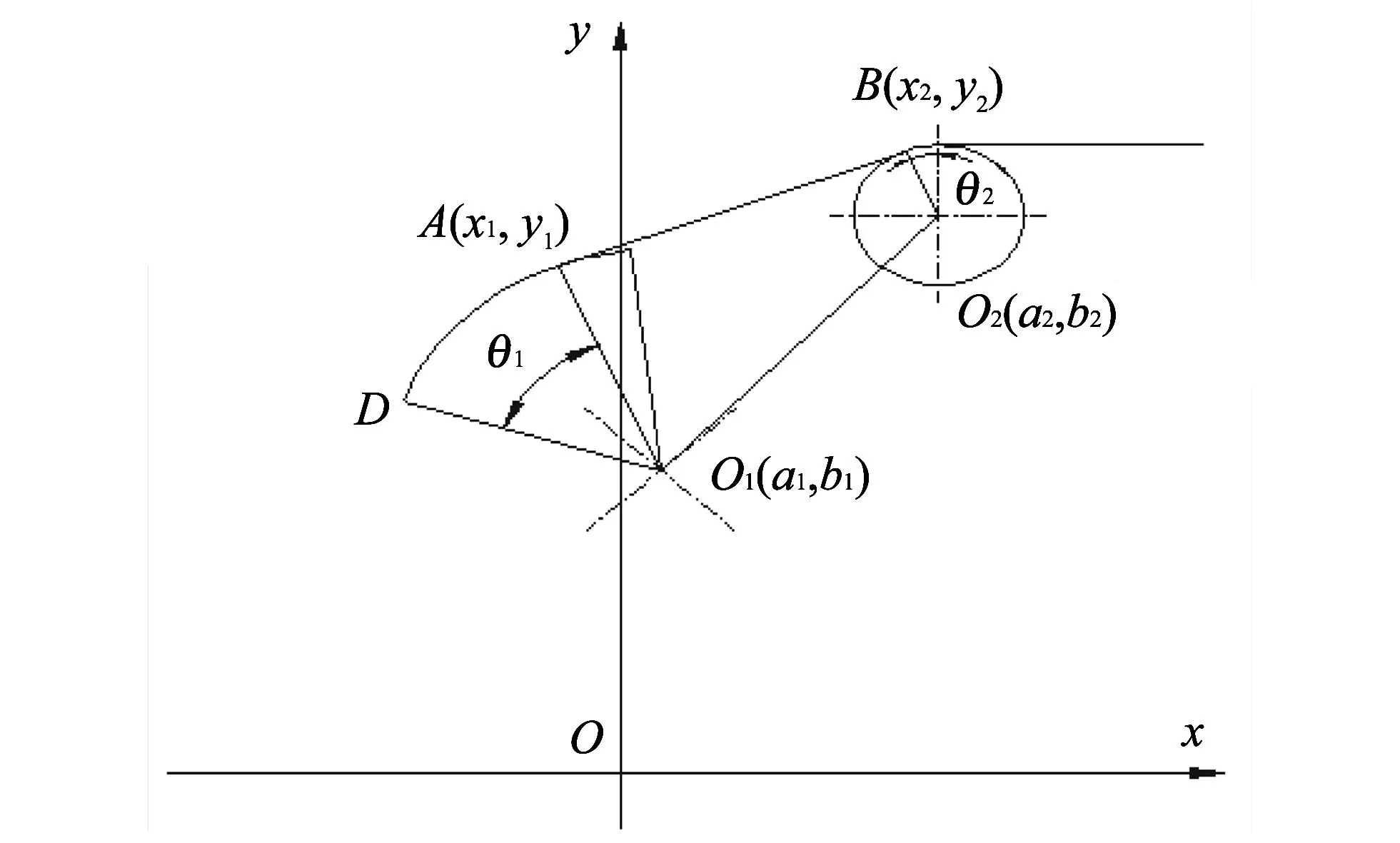
图 2 高射角时链条几何位置示意图Fig.2 Schematic of geometric position of chain under high angle of fire
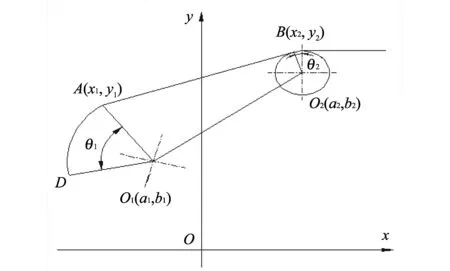
图 3 低射角时链条几何位置示意图Fig.3 Schematic of geometric position of chain under low angle of fire
在xoy坐标系下, 任意射角θi下起落部分各点坐标为
(1)
则直线O1O2与x轴夹角为
1) 高射角
直线AB与直线O1O2夹角为
(2)
则A, B点坐标分别为
直线AB的长lAB为
(3)
l在C1上的弧长l1为
(4)
式中:θO1D为直线O1D在0°射角时与x轴的夹角.
l在C2上的弧长l2为
(5)
2) 低射角
直线AB与直线O1O2夹角为
(6)
若记射角θb时, A点坐标为(x1b,y1b), 则低射角时, A, B点坐标分别为
直线AB的长lAB为
(7)
l在C1上的弧长l1为
(8)
l在C2上的弧长l2为
(9)
1.3平衡机力及力矩
链条长度l为
(10)
若记下标m为最大射角θm时的状态, 则气体压缩量Fi为
Fi=li-lm.
气体压力pi为
(11)
气体抗力Ki为
(12)
式中:n为平衡机个数.
平衡机力臂hi为
(13)
平衡机力矩Mi为

(14)
1.4起落部分重力矩
任意射角θi下, 起落部分重力矩Mqi为
(15)
式中:mq为起落部分质量; lq为起落部分重心至耳轴中心距离; γ0为射角0°时, 起落部分重心至耳轴中心连线与水平线夹角; θp为火炮纵向倾斜角度.
1.5不平衡力矩
任意射角θi下, 不平衡力矩ΔMi为
(16)
2优化模型
2.1多工况
平衡机在设计中一般考虑火炮水平放置时的4种工况:手动全射角从高到低(工况1)、 手动全射角从低到高(工况2)、 电动全射角从高到低(工况3)和电动全射角从低到高(工况4).
对于自行火炮, 还应兼顾火炮纵向倾斜±6°时手动、 电动全射角的工况. 记火炮纵向倾斜6°时上述4种工况为工况5~工况8; 火炮纵向倾斜-6°时上述4种工况为工况9~工况12.
2.2目标函数
对于每一种工况, 为了反映全射角范围内的不平衡力矩大小, 取各射角下不平衡力矩的欧几里得范数与个数的比值ΔMj, 即
(17)
若考虑每种工况的权重qj, 则目标函数可写成
(18)
2.3设计变量
从链条拉式平衡机设计原理可知, 影响平衡机性能的参数有:C1的圆心坐标a1和b1、 半径R1, 分段射角θb, 平衡缸内径d1和活塞杆外径d2、 初压p0, 容积W0. 而平衡机缸外径受总体布局等限制, 一般变化不大. 加之密封件规格的限制, 可把平衡缸内径d1取为定值. 此时, 优化设计变量为
(19)
2.4约束条件
由火炮总体布局和技术要求可确定设计变量的上限Xub和下限Xlb, 即
(20)
此外, 考虑到各设计变量的物理意义等, 还应要求x1,x2,x3,x4规整, x7取值范围为密封件公称直径规格系列.
3优化设计
3.1逐步二次规划法
链条拉式平衡机优化问题是一个多约束的七维非线性规划问题, 选用逐步二次规划法(SQP方法)进行优化设计[2-3].SQP方法被认为是求解带约束非线性规划较有效的方法[4-5].
SQP方法的基本原理是先构建拉格朗日函数, 用二次函数近似拉格朗日函数后化为二次规划(QP)问题, 然后解一系列QP子问题. 而步长用线性搜索计算, 黑塞矩阵由拟牛顿法的BFGS公式计算修正得到[6-7].
3.2约束条件
根据某火炮的总体布局和技术要求, 设计变量的约束条件为
lb=[-180;200;160;12;24;7.5;30],
ub=[-140;300;200;24;30;10;50].
3.3优化结果
用MATLAB语言编写链条拉式平衡机优化设计程序, 输出优化后的设计变量, 以及各射角下链条长度、 力臂、 气压、 气体抗力、 不平衡力矩等参数. 用该链条拉式平衡机优化前的设计变量输入设计程序, 得到链条长度、 力臂等几何量, 与原作图法设计该链条拉式平衡机时图中量取的上述几何量相比, 最大误差为0.46mm. 因此, 可认为该设计程序模型和计算正确.
取该链条拉式平衡机的设计参数作为初始参数. 考虑到某火炮使用工况, 以电动调炮为主、 手动调炮为辅, 且兼顾火炮纵向倾斜±6°时电动调炮的工况, 各种工况的权重qj可取为
qj=[0.1,0.1,0.35,0.35,0,0,0.025,0.025,0,0,0.025,0.025]T.
优化后的设计变量见表 1.

表 1 优化设计结果
设计程序计算得到各种工况下的不平衡力矩, 取最大不平衡力矩见表 2.

表 2 各工况下最大不平衡力矩
优化前后, 火炮水平放置时手动调炮最大不平衡力矩对比见表 3.

表 3 优化前后手动调炮最大不平衡力矩
优化前后, 火炮水平放置时手动、 电动调炮不平衡力矩对比如图 4 所示.
优化结果表明, 4种工况下不平衡力矩均减小, 将有效减低高低机手轮力、 随动功率.
此外, 链条拉式平衡机作图设计时, 只能考虑1种工况, 耗时2h以上. 而编程优化设计时, 考虑16种工况情况下, 用时仅14s, 设计效率大大提高.
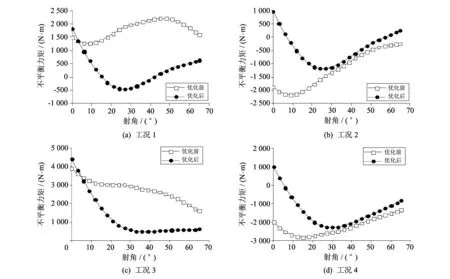
图 4 优化前后不平衡力矩对比图Fig.4 Unbalance moment before and after optimization
4结论
建立的某链条拉式平衡机不平衡机力矩计算模型, 经编程验证, 链条长度、 力臂等几何参量与作图法相比, 误差小于0.5mm, 可认为计算模型和程序正确可靠. 建立了考虑多种工况的链条拉式平衡机优化设计模型和程序. 根据总体布局和技术要求确定平衡机约束上下限, 用SQP法求解优化问题, 结果表明火炮水平放置时手动调炮不平衡力矩减小17.43%, 45.01%, 且电动调炮不平衡力矩均减小, 将有效减低高低机手轮力、 随动功率. 优化设计模型和程序, 还大大提高了链条拉式平衡机的设计效率.
参考文献:
[1]张相炎, 郑建国, 杨军荣. 火炮设计理论[M]. 北京:北京理工大学出版社, 2005.
[2]姜启源, 邢文训, 谢金星, 等. 大学数学实验[M]. 北京:清华大学出版社, 2005.
[3]朱笑荣. 非线性规划问题的若干算法研究[D]. 济南:山东科技大学, 2008.
[4]何坚勇. 最优化方法[M]. 北京:清华大学出版社, 2009.
[5]陈宇. 求解不等式约束非线性优化问题的改进的SQP算法研究[D]. 长沙:湖南大学, 2009.
[6]马小华, 魏飞, 高岳林. 带有二次约束二次规划问题的全局最优化[J]. 兰州理工大学学报, 2013, 39(3):136-140.
MaXiaohua,WeiFei,GaoYuelin.Globaloptimizationofquadraticprogrammingproblemwithquadraticconstraints[J].JournalofLanzhouUniversityofTechnology, 2013, 39(3):136-140. (inChinese)
[7]龚纯, 王正林. 精通MATLAB最优化计算[M]. 北京:电子工业出版社, 2009.
文章编号:1673-3193(2016)04-0381-05
收稿日期:2015-05-12
作者简介:鲁玉祥(1986-), 男, 工程师, 硕士生, 主要从事火炮总体技术研究.
中图分类号:TJ303.1
文献标识码:A
doi:10.3969/j.issn.1673-3193.2016.04.011
Optimum Design of a Chain Equilibrator
LU Yu-xiang, ZHAI Shao-bo, MA Ming-di, LIU Xiao-meng, XU Bao-cheng
(Northwest Institute of Mechanical & Electrical Engineering, Xianyang 712099, China)
Abstract:Aimed at the poor design efficiency and difficult optimum design, the mathematic modal of unbalance moment of chain equilibrator was established and optimized. Studying the design process and describing the position of chain with curvilinear equation in rectangular coordinate system, the mathematic modal of unbalance moment of chain equilibrator was established. Considering various working conditions, the objective function and constraint conditions of optimum design of equilibrator were established, as well as the mathematic model was formed. Based on SQP method, the program of optimum design was generated and the optimum result was obtained. The results indicate that the unbalance moments is reduced, which reduces the handwheel force of elevating and the power of following, thus the design efficiency is greatly increased.
Key words:chain equilibrator; unbalance moment; optimum design; SQP
猜你喜欢
航空兵器(2016年4期)2016-11-28
电脑知识与技术(2016年24期)2016-11-14
文理导航(2016年30期)2016-11-12
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14
