基于三相逆变器驱动开关磁阻电机的DITC调速系统设计*
2016-08-04 08:26刘成尧潘再平
电机与控制应用 2016年6期
刘成尧, 潘再平
(1. 浙江工业职业技术学院 电气电子工程分院,浙江 绍兴 312000;2. 浙江大学 电气工程学院,浙江 杭州 310027)
基于三相逆变器驱动开关磁阻电机的DITC调速系统设计*
刘成尧1,2,潘再平2
(1. 浙江工业职业技术学院 电气电子工程分院,浙江 绍兴312000;2. 浙江大学 电气工程学院,浙江 杭州310027)
摘要:讨论两相同步励磁驱动模式对开关磁阻电机(SRM)转矩波动抑制。在基于三相逆变器实现SRM两相同步励磁驱动的基础上,采取直接转矩控制方法,控制瞬时转矩跟随设定参考转矩,通过迟滞控制环节,实现转矩脉动抑制。MATLAB仿真测试验证了在两相同步励磁的基础上实现DITC控制的可行性和转矩脉动有效抑制。
关键词:三相逆变器; 两相同步励磁; 开关磁阻电机; 直接瞬时转矩控制
0引言
开关磁阻电机(Switched Reluctance Motor,SRM)结构简单、牢固、工作可靠,制造成本低、调速性能优越,是具有很强竞争力的一种调速电动机。由于SRM是双凸极结构,通常工作于磁饱和状态且具有局部磁路高度饱和特性,以及采用开关形式供电,导致换相期间电机转矩脉动大、工作噪声大,成为SRM主要缺点之一。转矩脉动直接影响着SRM驱动系统的输出特性,特别是在低速运行条件下的转矩脉动较为严重,如何抑制转矩脉动成为SRM研究重点之一。
转矩脉动的抑制方法一直是国内外学者研究热点。研究思路主要是基于给定的磁链特性和矩角特性,针对转矩脉动的控制策略包括直接转矩控制、变结构控制、模糊控制等。文献[1]把转矩分配函数与模糊神经网络转矩模型结合,实现了转矩脉动抑制。文献[2]用转矩、磁链双闭环的直接转矩控制方法达到抑制转矩脉动目的。文献[3]提出了基于RBF神经网络的单神经元PID控制方法,改善了电机调速性能。文献[4]把直接转矩控制与模糊PI调速系统结合起来,在抑制转矩的基础上改善了调速性能。
此外,有关学者对SRM的励磁方式进行研究,通过改进励磁模式来提高转矩脉动性能。文献[5]讨论了两相同步励磁通电两相互感的变化产生转矩,迭加于每相自感变化产生的转矩之上,实现机电能量的平稳转换,有效降低转矩脉动,在改善SRM绕组换相过程特性的同时,也增加SRM最大平均转矩。还进一步讨论了三相逆变器进行功率变换驱动的可行性,通过试验证明该励磁方式能够提供较大力矩和抑制转矩脉动。文献[6]研究三相开关磁阻电机的两相励磁功率变换电路,采用了通用的三相逆变器电路和改进的720°电角度换相方法实现对SRM的驱动。
三相逆变器功率变换器广泛用于直流电机等驱动中,研究基于该功率变换器的SRM转矩脉动抑制方法具有很强的应用价值。本文在上述两相同步励磁的研究基础上深入分析基于三相逆变器功率变换电路的直接瞬时转矩控制(Direct Instantaneous Torque Control, DITC)方法,在结合两相同步励磁具有较大扭矩特性的同时,通过DITC控制两相同步励磁的换相,改变传统单相励磁DITC控制的3种开关状态,采取单相-两相状态励磁耦合开关,与相位区间结合对励磁状态转矩滞环控制方法对转矩的实时调控。仿真测试表明了该控制策略的有效性。
1三相逆变器驱动SRM的DITC系统
DITC系统主要包括SRM电机本体、三相逆变器功率转换器模块、开关表、瞬时转矩计算单元、DITC单元等。其中,DITC单元是整个系统的控制核心,包含参考转矩与瞬时转矩的比较以及给定开关角。系统框图如图1所示,分别讨论系统的主要单元模块,分析三相逆变器功率变换的SRM特性和换相规则,设定开关状态,给出迟滞转矩开关策略。
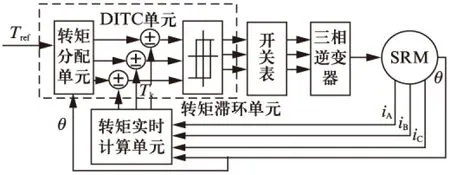
图1 三相逆变器驱动SRM的DITC系统框图
1.1三相逆变器驱动SRM
图2为驱动6/4型SRM的三相逆变器功率变换电路。与半桥不对称功率变换电路相比,电路拓扑结构基本相同,与SRM的连接方式不同。SRM内部原来6抽头(6/4型SRM电机)改为 a′bc′ 极间进行抽头短接,ab′c三个抽头。换相过程中,维持两相中一相电流导通方向不变。通过(a+)(a′-)(b+)(b′-)、(c+)(c′-)(b+)(b′-)、(c+)(c′-)(a′+)(a-)、(b′+)(b-)(a′+)(a-)、(b′+)(b-)(c′+)(c-)、(a+)(a′-)(c′+)(c-)、(a+)(a′-)(b+)(b′-)等6个阶段进行换相。

图2 6/4型SRM的三相逆变器功率变换电路
基于Maxwell软件的仿真可知,6/4型SRM在正向绕组条件下,两相同步励磁的磁场分布如图3所示,属于长磁链励磁。
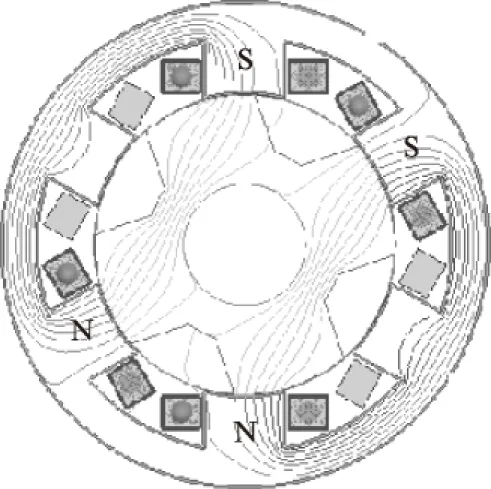
图3 两相同步励磁的长磁链分布仿真图
在两相同步励磁工作下,任意时刻相邻两相同时导通,通过各相自感和互感的叠加,平滑转矩波动和提高平均转矩。按照简化线性模型对测试模型的工作原理进行分析,线性模型下转矩算式为
(1)
互感Mab、Mbc、Mca的关系为式(2)和式(3):
(2)
Mbc(θ)=Mab(θ-30°)
(3a)
Mca(θ)=Mab(θ-60°)
(3b)
式中:N——电机相数;
Rg——气隙电阻;
μ0——气隙磁导率;
lc——堆叠厚度;
Dr——转子直径;
g——气隙厚度;
ra、rb——a、b相定转子的角度。
图4表示为转矩在自感、互感及电流共同作用下呈现平滑特性,转矩脉动理论上消失。
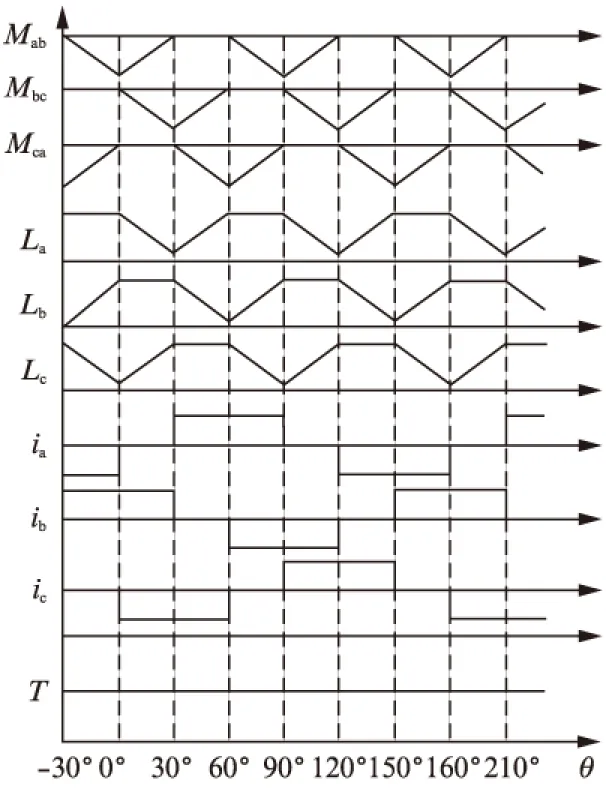
图4 两相同步励磁的转矩特性图
基于三相逆变器功率变换器,采用720电角度换相策略的不对称均匀励磁获得相电流波形如图5所示,相对于单相励磁的波形脉动性有一定改善。图6为三相逆变器驱动下均匀对称两相同步励磁模式下的ABC三相电流波形,在任意时间点都有两相同步导通。
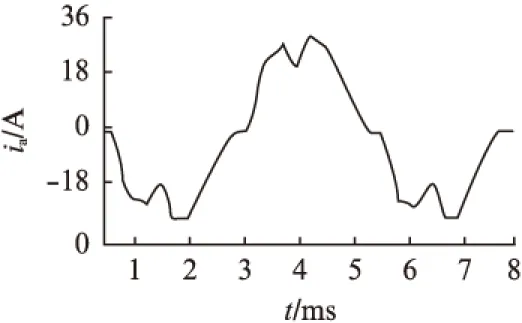
图5 不对称均匀励磁相电流波形
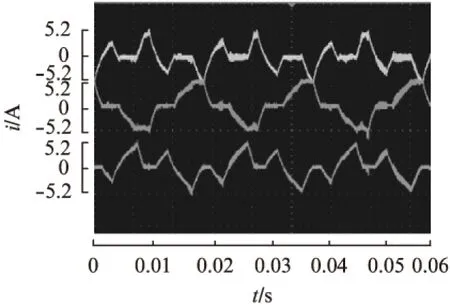
图6 对称均匀励磁相电流波形
通过上述分析,在三相逆变器驱动下,通过两相同步励磁,能够改善单相励磁的转矩脉动。由于两相同步导通,相间转矩的耦合(互感磁链)增加了平均转矩。同时,两相同步励磁对转子的作用受到定转子间角度影响,使得开关断角度的控制较单相励磁更加重要,直接影响了合成转矩的大小,甚至能够引起转子锁死现象。基于两相励磁的转矩控制研究中,文献[6]提出720电角度一周期的对称不均匀两相励磁方式解决两相换相过程负转矩问题;文献[4]深入研究长磁链对转矩的影响,提出在CCC和APC的基础上采用PI算法的PWM自调节技术控制转矩大小。本文在文献[6]的换相策略基础上,采用直接瞬时转矩控制法研究转矩脉动抑制方法。
1.2三相逆变器功率变换电路相开关状态
SRM在三相逆变器驱动下采用两相导通方式。每一瞬间有2个功率管导通,每隔1/6周期(120电角度)换相一次,每次切换一个功率管,每个功率管导通120度。考虑需要对定子线圈的续流导通,实际换相顺序变成S1S6→S6→S3S6→S6→S3S2→S2→S5S2→S2→S5S4→S4→S1S4→S4→S1S6。在每一时刻三相六个开关工作时,当两相两个开关导通状态用于增加电压,增大转矩;两相一个开关导通状态用于电感泄流,减小转矩。图7给出了S1S6导通状态和S6导通状态的绕组电流流向。用六位二进制数来表示换相状态,每一位二进制数代表一个功率管的开关状态,0表示功率管关断,1表示功率管导通,对应的换相开关状态表的对应关系如图7和表1所示。
换相状态包括1和0,相对于传统不对称半桥驱动SRM的单项励磁模式三种换相状态(1,0,-1)减少了-1状态(上下开关都关断)。DITC控制单元根据位置传感器信号和累加计数方式获取720电角度相位区间,根据开关状态表向转矩调节器提供开关信号。DITC系统的驱动开关表如图8所示。
1.3瞬时转矩计算单元
DITC控制系统需要依据瞬时转矩反馈值。根据两相同步励磁特性,采用基于Miller仿真法的拟合函数估算瞬时转矩。根据励磁特性,采取对中间区域采用线性函数,对齐和不对齐位置采用Frohlich函数拟合。采用傅里叶级数分解的方法,将电感或磁链随转子位置的变化用一个恒定分量和一系列正弦或余弦函数来表示。其f(θ)表达式为

图8 DITC系统的驱动开关表
(4)
为便于在线计算,选择特定角度位置,0°,7.5°,15°,22.5°,30°,可得f(θ)函数如下:
f(θ)=0.5+0.4975cos(6θ+π)-
0.0025cos(18θ+π)
(5)
根据分段线性化磁链计算式,可得
(6)
式中:Lu——不对齐位置电感;
La——对齐位置电感;
Las——饱和区增量电感;
k——曲率因子。
结合式(5)、式(6),可推得转矩计算式为
(7)
通过式(7)计算瞬时转矩,作为反馈量代入DITC控制系统。
1.4DITC控制单元
与传统控制器不同,DITC将转矩作为直接控制的变量,相电压由转矩参考与瞬时转矩之差决定,通过调节差值区间实现转矩迟滞控制。720电角度的6换相区图如图9所示。在工作期间,结合720°电角度的变换,分割成6个换相区间。以Ⅰ换相区为例,在Ⅰ换相区AC两相导通,导通状态包括两相都导通“001001”状态和C相单独导通“000001”状态。采用固定差值T∝的转矩变迁图如图10所示: 当瞬时转矩TD与参考转矩之差Tref小于设置的差值T∝时,即|Tref-TD|
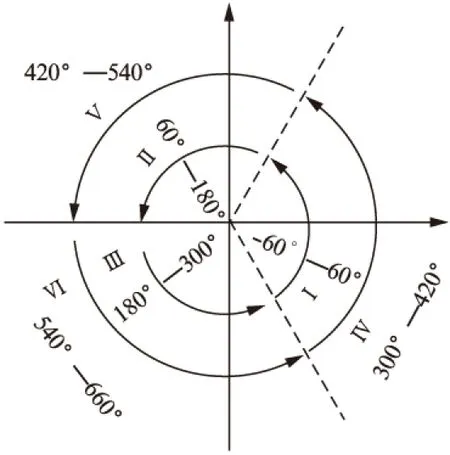
图9 720电角度的6换相区图
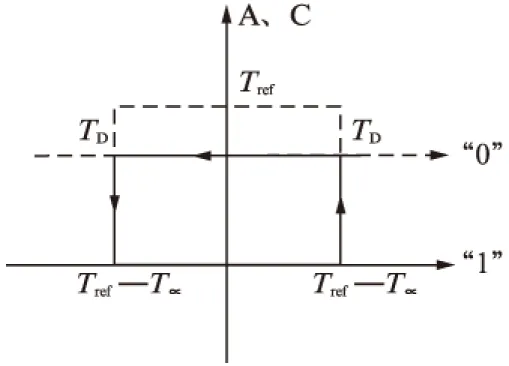
图10 采用固定差值T∝的转矩变迁图
从Ⅰ区换相到Ⅱ区的相邻换相区的换相过程是关闭A相,接入B相,形成BC相导通。这阶段瞬时转矩控制较为复杂,需要考虑A相绕组磁能转移释放,设置内部的滞环控制环节。具体控制过程为: 进入换相时,当A、C处于“0”状态,转矩快速减小,根据内部滞环控制,检测退磁状态。内部滞环转矩误差Ts大于T∝2,当转矩误差减小至Ts,开关表动作换相,切换为B、C相导通,进入Ⅱ换相区。当在换相阶段,A、C处于“1”状态,转矩增加。由于导通角的影响,A相导通将产生负转矩,根据Tref-TD误差值,设置直接换相和间接换相两种策略。当转矩上升期间Tref-TD>Ts,直接换相,切换为B、C相导通;当Ts>Tref-TD>T∝2,A、C相进入“0”状态,A相退磁。当转矩误差减小至Ts,开关表动作换相,切换为B、C相导通,进入Ⅱ区。在换相阶段,如瞬时转矩TD超过Tref,且误差大于Ts,不换相,保持A、C相“1”状态,利用A相导通角产生的负转矩抑制瞬时转矩。当TD-Tref 图11 采用两种转矩差值的转矩变迁图 2仿真结果及分析 根据本文所述基于功率变换器SRM的DITC控制策略,采用MATLAB仿真软件对一台三相6/4极SRM进行转矩特性和脉动最小化仿真研究,选取参考转矩为0.3N·m。 图12显示了500r/min时DITC系统三相电流及总转矩波形图,目标转矩为0.3N·m。通过转矩滞环控制器的作用,直接控制每一时刻的瞬时转矩,得到总转矩较为平缓,跟随参考转矩值,并被限制在转矩滞环控制器的所设定合理偏差范围内。图13和图14为阶跃转矩指令下DITC系统的转矩控制仿真效果。图13参考转矩从0.1N·m突增到0.3N·m,实际转矩在阶跃后10ms内进入预定误差范围内;图14参考转矩从0.3N·m突减到0.1N·m,实际转矩阶跃后10ms 内也进入预定误差范围内。 图12 500r/min时DITC系统三相电流及总转矩波形图 图13 参考转矩从0.1N·m突增到0.3N·m,实际转矩波形图 图14 参考转矩从0.3N·m突减到0.1N·m,实际转矩波形图 这与前面所述DITC系统控制瞬时转矩的原理一致,仿真结果验证了理论的正确性。结合前文所分析的DITC控制单元转矩迟滞控制原理做可知,理论分析中所采取的直接判断转矩来控制开关表可能会造成转矩开关表输出的振荡。通过仿真设计,采取设定转矩最小误差范围值T∝,当|Tref-TD| 3结语 本文在分析三相逆变器功率变换器驱动SRM对转矩脉动抑制效果的基础上,引入直接瞬时转矩控制方法,用于改进转矩控制性能。依据瞬时转矩与参考转矩的偏差,为三相逆变器提供开关信号,在配合720°电角度换相工作的条件下,能够获得较好的转矩脉动抑制效果。仿真试验证明了该控制策略的有效性。 【参 考 文 献】 [1]李永坚,许志伟,彭晓.SRM积分滑模变结构与神经网络补偿控制[J].电机与控制学报,2011,15(1): 34-37. [2]许爱德,樊印海,李自强.空间电压矢量下SRM转矩脉动最小化[J].电机与控制学报,2010,14(1): 35- 41. [3]朱学君,沈睿.基于RBF网络SRM的DITC系统仿真研究[J].工业仪表和自动化装置,2015(1): 58-61. [4]王勉华,薛会强.基于模糊PI控制器SRM的DITC系统研究[J].微特电机,2014,41(9): 53-55. [5]JIN W A, SEOK G O, JAE W M, et al. A three-phase switched reluctance motor with two-phase excitation[J]. IEEE Trans on IA, 1999,35(5): 1067-1075. [6]黄海宏,王海欣.三相逆变桥驱动开关磁阻电机的研究[J].电工电能新技术,2005,27(3): 63-67. *基金项目:国内访问学者基金项目(FX2014167) 作者简介:刘成尧(1980—),男,硕士,讲师,研究方向为开关磁阻电机两相励磁模式。 潘再平(1957—),男,教授,硕士生导师,研究方向为电机系统及其控制、风力发电技术。 中图分类号:TM 301.2 文献标志码:A 文章编号:1673-6540(2016)06- 0039- 06 收稿日期:2015-11-23 Research of SRM DITC Control System Based on Three-Phase Inverter* LIUChengyao1,2,PANZaiping2 (1. Zhejiang industry Polytechnic College, Shaoxing 312000, China;2. College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China) Abstract:The effect of two phase synchronous excitation mode on the torque ripple of switched reluctance motor was discussed. Based on the three-phase inverter driver, adopt direct instantaneous torque control(DITC) method to minimize torque ripple was adopted by controlling the instantaneous torque to track the reference torque directly and combining with a torque hysteresis-controller. The feasibility of the DITC and the effective suppression of the torque ripple based on two phase synchronous excitation were resulted by MATLAB simulation. Key words:three-phase inverter; two-phase excitation; switched reluctance motor(SRM); direct instantaneous torque control(DITC)