基于闭环直流偏置补偿积分器的新型定子磁链观测器
2016-08-04 08:33梅柏杉刘东洋
电机与控制应用 2016年6期
关键词:低通滤波器
梅柏杉, 高 宁, 刘东洋
(上海电力学院 电气工程学院,上海 200090)
基于闭环直流偏置补偿积分器的新型定子磁链观测器
梅柏杉,高宁,刘东洋
(上海电力学院 电气工程学院,上海200090)
摘要:提出了一种基于闭环直流偏置补偿算法积分器的新型定子磁链估计方法。与现有的定子磁链估计方法相比,该方法通过引入一种闭环直流偏置补偿结构,不仅可以提高低频时定子磁链观测器的稳定性和准确性,缩短观测器在整个频率范围内的响应时间,而且算法更加简单。对新型定子磁链观测器的无速度传感器SVM-DTC系统进行了仿真研究。结果表明,该定子磁链估计方法能克服现有定子磁链观测器所存在的主要缺陷,包括在低频范围。
关键词:感应电机; 低通滤波器; 定子磁链估计; 可变的截止频率
0引言
无论是基于矢量控制还是直接转矩控制的无速度传感器感应电机调速系统,定子磁链观测的准确与否都是决定调速系统稳定性和准确性的关键之处。众所周知,基于电压模型的纯积分器定子磁链观测是最简单的方法,但存在以下问题: (1) 在纯积分器的输入端,对直流漂移的灵敏性会导致积分器的饱和;(2) 纯积分器的初始条件会引起定子磁链观测信号中出现不希望的直流偏置。
为了解决这些不足之处,学者们采用了各不相同的方法,提出了感应电机调速系统不同模式下3种不同的闭环修正积分算法: (1) 基于饱和反馈的闭环修正积分算法,成功地补偿了积分器直流偏置,特别是在高速情况下,但是其准确性却受到饱和限制水平的影响;(2) 基于改进型的限幅积分器,保证系统运行在恒定磁链幅值的条件下;(3) 自适应补偿积分器,结合了以上两种方法,保证系统的稳定性和准确性,但却受其复杂性和直流偏置补偿的响应时间的影响。
除了基于闭环的定子磁链观测器,还有一些开环的定子磁链观测方法,同样也能消除基于纯积分器的定子磁链观测所存在的缺陷。它们通常采用低通滤波器(Low Pass Filter, LPF),但却引入磁链幅值和相位的误差,尤其是在无速度传感器感应电机低频运行范围内。因此,学者们提出几种基于估计误差补偿的LPF定子磁链观测器[3-4]: (1) 含有一个固定极值的一阶LPF的定子磁链观测器,包括估计误差补偿算法;(2) 含有可编程极值计算的几个级联的一阶LPF的定子磁链观测器,可使磁链相位误差为0,也包括振幅误差补偿算法;(3) 滤波器的极点等于定子频率值或其倍数值的可编程LPF,包括一个磁链矢量旋转和幅值的算法,用于补偿估计磁链的相位和振幅的误差。但以上方法仍无法克服低频时观测器所引起的估计误差和不稳定性。
本文提出了一种基于闭环直流偏置补偿积分器的定子磁链观测方法,主要有如下优点: (1) 避免用于直流偏置补偿的定子励磁频率ωe的除法运算;(2) 避免复杂的定子磁链矢量相乘、旋转和频率逆转;(3) 在定子频率为0时,避免磁链观测器为零增益;(4) 低频时,磁链观测器相当于纯积分定子磁链观测;(5) 通过单反馈增益方法,提高磁链观测器的截止频率,从而解决定子磁链估计的响应时间的问题。故,此估计方法能提高无速度传感器感应电机的动态性能,特别是在低频范围。
1无速度传感器感应电机的控制策略
1.1感应电机的数学模型
本文采用电压型感应电机,其在α-β静止坐标下的数学模型如下。
电压、磁链方程:
(1)
转矩方程:
(2)
运动方程:
(3)

usα、usβ——定子在α、β轴上的电压;
Rs、Rr——定子、转子电阻;

isα、isβ、irα、irβ——定子、转子在α、β轴上的电流;

ψsα、ψsβ、ψrα、ψrβ——定子、转子在α、β轴上的磁链;


ωr——转子转速;
Ls、Lr——定、转子自感;
Lm——定转子互感;
TL、Te——负载电磁转矩;
pn——极对数;
J——转动惯量。
1.2无速度传感器感应电机的SVM-DTC控制
感应电机SVM-DTC控制的策略是将空间矢量调制技术(Space Vector Pulse Width Modulation, SVPWM)与直接转矩控制技术(Direct Torque Control, DTC)相结合。其原理是利用定子侧电压、电流来估计定子磁链和电磁转矩。通过分别与给定的定子磁链和给定的电磁转矩作比较,得到定子磁链和电磁转矩的估计偏差。估计偏差通过PI调节器,经过SVPWM调制合成所需的空间电压矢量,实现电磁转矩的快速控制。无速度传感器感应电机SVM-DTC控制系统原理图如图1所示。
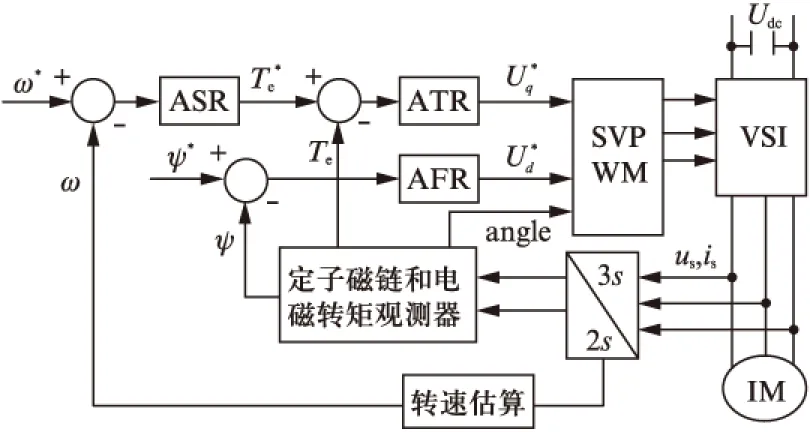
图1 无速度传感器感应电机SVM-DTC控制系统原理图
1.3无速度传感器技术
无速度传感器技术不断发展,主要分为两类[7-8]: (1) 基于模型的速度辨识;(2) 基于信号注入的速度辨识。目前,无速度传感器技术中最常用的方法就是基于模型参考自适应法(MARS)的速度辨识,MARS转速辨识主要有如下方法: (1) 基于转子磁链法,但含有积分环节,所以存在积分初值和漂移的问题;(2) 基于反电动势法,虽然消除了纯积分,但仍未解决定子电阻变化的影响;(3) 基于无功功率法,不但消除了纯积分,也解决了定子电阻的影响,但仍存在定子漏感的影响。
本文采用一种基于改进的MARS转速辨识,由式(3)可知电机转速与电磁转矩也相关,而电磁转矩又与转子磁链相关。传统的基于转子磁链的MARS速度辨识仅考虑转速估计偏差与两个模型(参考模型和可调模型)估计的转子磁链矢量误差之间的关系,但改进的MARS转速辨识同时又考虑了两个模型估计的电磁转矩误差与转速估计偏差之间的关系。其结构框图如图2所示。根据式(4)、式(6)构成参考模型,根据式(5)、式(7)构成可调模型。估计转速由式(10)可得。

图2 基于改进的MARS转速辨识结构图
(4)
(5)
(6)
(7)
其中:
式中: Tr——转子励磁时间常数;




(8)
由式(3)、式(6)、式(7)可推得
(9)
与传统的基于转子磁链的MARS速度辨识原理一样,若同时又考虑模型估计的电磁转矩误差与转速估计偏差间的关系时,根据Popov超稳定理论由式(8)、式(9)可以推得转速估计式为
(10)
2新型的定子磁链观测器
从式(1)中的第1个式子可得到最基本的定子磁链观测式为
(11)

但式(11)的定子磁链观测法是基于纯积分器的定子磁链观测,很容易在定子电压幅值或定子电压频率的快速变化过程中出现由初始状态误差引起的直流偏置现象。因此,为了补偿积分器的直流偏置,有必要定义一种算法,用于直流偏置的检测和基于闭环回路的消除。
直流偏置的检测是基于稳态积分器的传递函数,此传递函数为
(12)
式中:ωe——定子励磁频率;

(13)

(14)

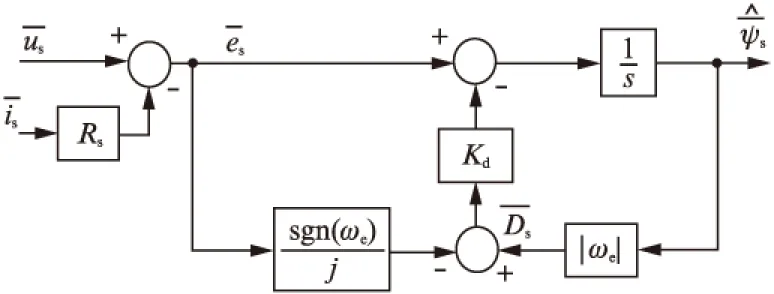
图3 基于直流偏置补偿的定子磁链观测器
(15)
(16)
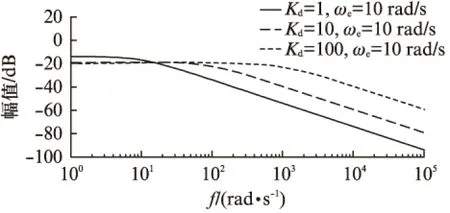
图4 Kd对定子电压谐波幅值的影响
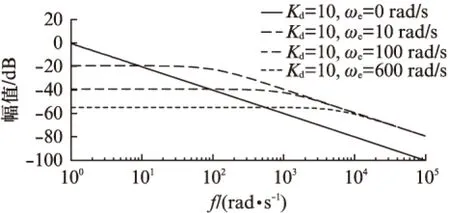
图5 ωe对定子电压谐波幅值的影响
3仿真与分析
定子磁链观测器在两种不同的电机励磁条件下进行仿真: (1) 在固定的定子励磁频率和幅值变化的定子电压下的开环控制系统;(2) 无速度传感器SVM-DTC控制系统。感应电机的参数如下:Pe=2kW,Ue=400V,fe=50Hz,p=2,Rs=0.19Ω,Rr=0.18Ω,Ls=0.19H,Lr=0.19H,Lm=0.186H。
图6中,定子磁链观测器的响应在第一种情况下,定子励磁频率ωe=1rad/s,定子电压幅值阶跃变化为[10V,30V,50V,70V,90V],阶跃变化的时间设置为[0s,0.8s,1.6s,2.4s,3.2s],仿真中设置C=1,ωc=100rad/s。对新型定子磁链观测器和基于LPF定子磁链观测器的两种定子观测器进行仿真。基于LPF定子磁链观测器的结构框图如图7所示。通过与定子磁链实际值进行比较,可以看出新型磁链观测器的响应速度要比基于LPF的定子磁链观测器快。其他条件不变,将新型定子磁链观测器中的C值分别设为2和0.2,仿真结果如图8所示,通过与定子磁链的实际值比较分析可推导出C值的增加可提高新型定子磁链观测器的响应速度。

图6 定子磁链的实际值和两种不同的定子磁链观测器的定子磁链估计值
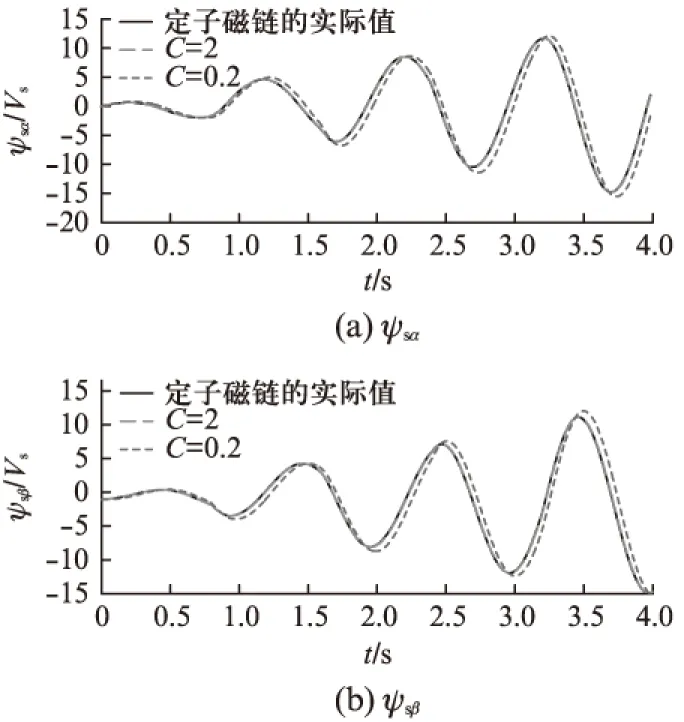
图8 定子磁链的实际值,C=2和C=0.2新型定子磁链观测器的定子磁链估计值
基于新型定子磁链观测器的无速度传感器SVM-DTC控制系统的基本原理框图如图1所示,给定的电机转速ωr*=[80rad/s,160rad/s],在t=1.5s时,给定转速由80rad/s变为160rad/s。直流电压Udc为400V,电机空载起动,2.5s后给定额定负载10N·m。仿真中设置C=2,ωc=100rad/s。仿真结果如图9所示。通过与定子磁链的实际值进行比较分析可看出,新型定子磁链观测器的响应速度随着定子频率的变化而变化,而且在低频运行时磁链估计准确且稳定。将C值改为12,其余条件不变,仿真结果如图10所示,通过与图9中定子磁链估计值进行比较分析可看出,C值的增加虽然能提高磁链观测器的响应速度,但超出一定的值却降低了低频时磁链观测器的准确度。基于改进的MARS转速估计方法,仿真结果如图11所示,转速的实际值与估计值之间的差很小,甚至在低速时。

图9 基于新型定子磁链观测器的无速度传感器SVM-DTC控制系统的定子磁链的实际值与估计值
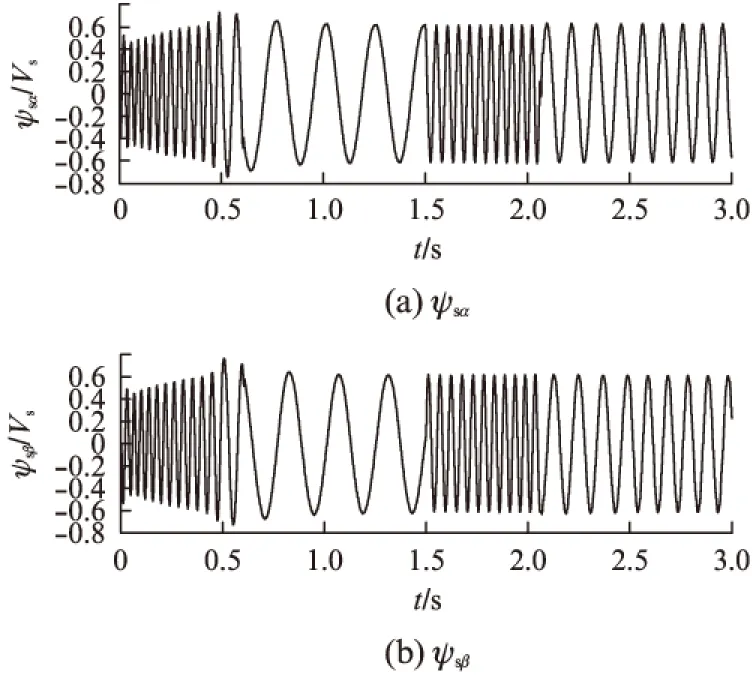
图10 基于新型定子磁链观测器无速度传感器SVM-DTC控制系统的定子磁链估计值,C=12
4结语
本文提出的新型定子磁链观测器不仅结构简单,而且包含的反馈能提高低频时系统的稳定性和准确性,使得整个频率范围内定子磁链观测器的响应速度更快。从结果可推断出,随着新型定子磁链观测器的反馈增益的增加,虽然提高了观测器的响应速度,但不能增加过多,否则会引起低频时定子磁链观测器的失真。因此,当设置定子磁链观测器的反馈增益时,需使得磁链观测器的响应速度和失真水平保持平衡。
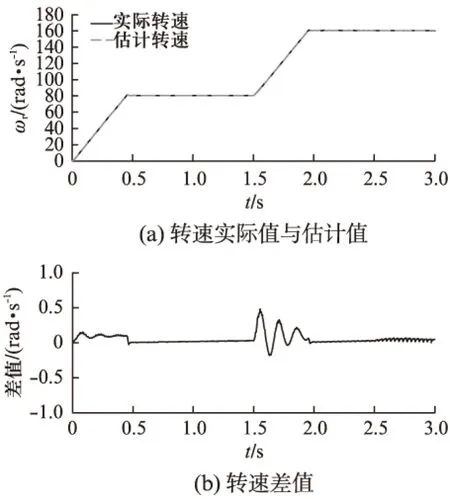
图11 基于改进的MARS的无速度传感器SVM-DTC控制系统的转速实际值与估计值,以及两者的差值
【参 考 文 献】
[1]HU J, WU B. New integration algorithms for estimating motor flux over a wide speed range. IEEE Trans Power Electron,1998, 13(5): 969-977.
[2]SHIN M H, HYUN D S, CHO S B, et al. An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors. IEEE Trans Power Electron, 2000,15(2): 312-318.
[3]COMANESU M, XU L. An improved flux observer based on PLL frequency estimator for sensorless vector control of induction motors. IEEE Trans Ind Electron, 2006,53(1): 50-56.
[4]TAN G, WU X, YE Z, et al. Dual three-level double-fed induction motor control based on novel stator flux observer∥in Proc Int Conf Elect Control Eng, 2010: 3668-3671.
[5]刘艳科.感应电机直接转矩控制低速性能优化研究.大连: 大连理工大学,2010.
[6]吴桂贤.基于SVPWM的感应电机直接转矩控制研究.武汉: 华中科技大学,2009.
[7]KOWALSKA T O, DYBKOWSKI M. Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive. IEEE Trans Ind Electron, 2010,57(4): 1296-1308.
[8]齐放,邓智泉,仇志坚,等.基于MRAS的永磁同步电机无速度传感器[J].电工技术学报,2007,22(4): 53-58.
[9]周超,郗晓田,游林儒,等.基于BEMF的MRAS矢量控制系统速度辨识及其数字化实现[J].微电机,2013,46(12): 60-63.
作者简介:梅柏杉(1957—),男,本科,教授,研究方向为特种电机及其控制系统。
中图分类号:TM 301
文献标志码:A
文章编号:1673-6540(2016)06-0028-06
收稿日期:2015-03-13
A New Stator Flux Estimator Based on A Integrator With A Closed-Loop DC Offset Compensation
MEIBaishan,GAONing,LIUDongyang
(College of Electrical Engineering, Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:A new stator flux estimation method was presented, based on a integrator with a closed-loop dc offset compensationalgorithm.Compared with existing stator flux estimation methods,this method not only improved the stability and accuracy of the stator flux observer at low frequencies,but also shortened the response time of the observer over the entire frequency range,by using a closed-loop dc offset compensation structure,besides this estimation algorithm was much simpler.Sensorless-speed SVM-DTC systems based on the novel stator flux observer was tested by means of simulation runs, simulation results indicated that the stator flux estimation method was able to overcome the main defects in the existing stator flux observers under all operating conditions, including the low stator frequency range.
Key words:induction motor; low pass filter; stator flux estimation; variable cutoff frequency
高宁(1989—),女,硕士研究生,研究方向为感应电机控制技术。
猜你喜欢
通信技术(2020年4期)2020-04-25
通信技术(2019年1期)2019-01-23
机电信息(2018年6期)2018-03-05
电子技术与软件工程(2017年19期)2017-11-09
科技资讯(2016年31期)2017-03-30
现代电子技术(2015年16期)2015-11-17
成都大学学报(自然科学版)(2015年3期)2015-08-01
物联网技术(2014年12期)2014-12-24
现代电子技术(2012年19期)2012-11-19
电子设计应用(2004年12期)2004-04-21