开关磁阻电机特征点交截的转子位置估计方法*
2016-08-04 08:26孙刚,张磊
电机与控制应用 2016年6期
孙 刚, 张 磊
(南京信息职业技术学院,江苏 南京 210023)
开关磁阻电机特征点交截的转子位置估计方法*
孙刚,张磊
(南京信息职业技术学院,江苏 南京210023)
摘要:针对传统的脉冲注入法需要脉冲电流阀值,而且只能实现单拍工作的缺点,在传统的脉冲注入法基础上,提出一种特征点交截的转子位置估计方法。根据电感曲线、脉冲电流峰值、转子位置三者之间关系,对开关磁阻电机各相同时注入高频脉冲,提取相脉冲电流峰值的包络线。因为包络线的交点对应转子位置信号的变化,所以只要通过简单的逻辑比较,就可以间接获得转子的位置。通过仿真和试验,验证了该方法的可行性。
关键词:开关磁阻电机; 无位置检测; 特征点交截; 脉冲注入
0引言
开关磁阻电动机(Switched Reluctance Motor, SRM)具有结构简单坚固、效率高、调速范围宽等许多优点,在混合动力电动车(Hybrid Electric Vehicle, HEV)、风能发电、家用电器、航空器等许多领域具有广阔的应用前景。在目前的应用系统中,SRM都需要位置传感器获取转子的位置,使得系统结构变得复杂、成本增大。在高温、振动等恶劣运行环境下,位置传感器有失效可能性,降低了系统的可靠性,故SRM无位置传感器技术得到国内外很多学者的广泛研究[1-2],也取得了大量的研究成果。
SRM无位置检测技术分为被动检测法、主动检测法及混合检测法。被动检测法分为磁链/电流法、互感法、状态观测器法和人工智能法,直接利用电机的相电压、相电流以及磁链等电磁量,根据预先建立的电机模型来估计转子位置。该方法的优点是无需外加检测电路,缺点是算法复杂、计算量很大、对处理器的要求高。主动检测法有脉冲注入法、调制解调法及附加电路法。混合检测法需要同时使用激励相和空闲相的电压、电流等信息,并进行相应的解算得到转子位置,典型的有互感电压检测法[3]和递归最小二乘法[4]等。
在脉冲注入法中[5-9],对非导通相注入高频脉冲信号,根据脉冲电流和电感的关系,通过脉冲电流与预定的电流阈值比较,得到转子的换相信号。该方法逻辑简单、容易实现、但精度低、可靠性差、阈值确定困难,当电源电压波动或者负载发生变化时,电流阈值会随之变化,若阈值不及时更新,就会产生很大的误差。文献[6]提出了同时向两相非激励相注入脉冲,比较其脉冲电流的大小来确定换相信号。该方法优点是不需要电流阈值,换相点的判断与响应电流的相对变化有关,而与其值的大小无关,即无论电压脉冲激励的持续时间和幅值是否发生变化,都不会影响换相点的判断,就大大增加了抗干扰性,但缺点是只能实现单相导通,不能进行双拍工作,对提高电磁转矩是不利的。
本文在基于脉冲注入法的基础上提出一种新型的特征点交截的转子位置估计方法。其依据三相的电感曲线与转子位置的函数关系,利用简单的比较电路获得像光电式位置传感器一样的半周期转子位置信号。
1特征点交截基本原理
本文样机为12/8结构的三相开关磁阻电机,根据SRM电机的结构特点,在静止和低速情况下,忽略互感和旋转电动势,脉冲电流峰值与电机电感成反比关系,如图1所示。因为电感包含了转子的位置信息,所以脉冲电流峰值包络线也就反映了电机位置信号的变化。
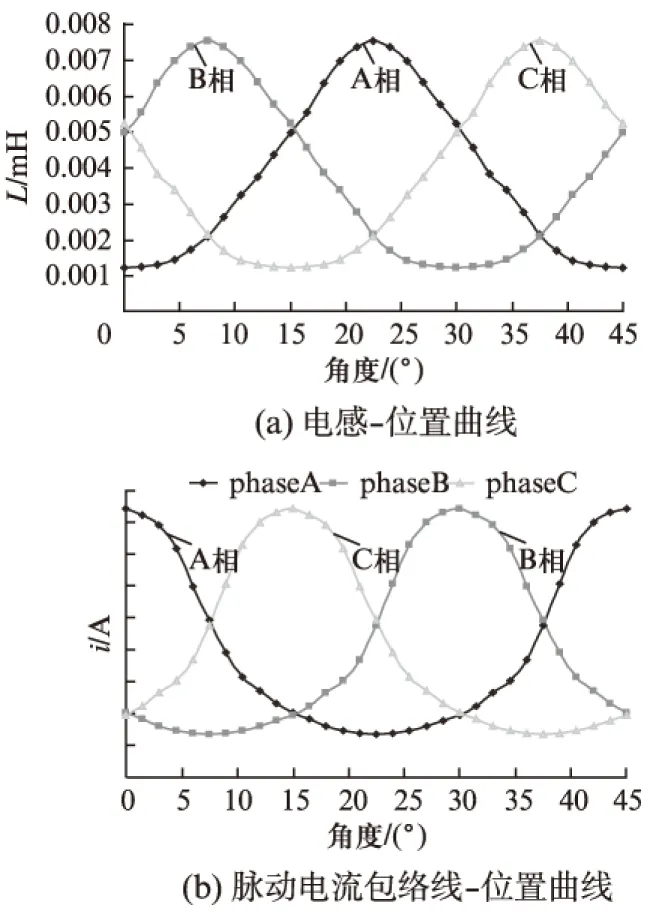
图1 电感-脉冲电流-位置关系
因为开关磁阻电机结构对称,所以12/8结构SRM三相电感曲线相差15°。由图2电感与转子位置信号之间的关系可以看出,A相θ=0°位置对应B相和C相电感曲线交点M1,在θ=22.5°时对应B相和C相电感曲线的交点M2,M1和M2两点正是A相位置信号变化的时刻,所以可以通过B相和C相的电感曲线的交点判断A相的位置信号,点M1、M2相差半电感周期。同理,也可以通过A相和B相电感曲线交点判断C相的位置信号,A相和C相电感曲线交点判断B相的位置信号。

图2 三相电感与转子位置关系
根据图1电感曲线与脉冲电流包络线反比关系,三相脉冲电流包络线两两交点也都对应另一相位置信号的变化时刻,所以可以同时向三相注入高频脉冲,解算出脉冲电流峰值的包络线,利用包络线两两比较估计出转子位置信号(P、Q、R)。
2仿真分析
为了验证本文方法的可行性,在MATLAB/Simulink环境下搭建了12/8结构SRM位置估计的仿真模型。仿真条件: 母线电压为270V,注入的高频测试脉冲频率fs=10kHz,占空比为10%,电流斩波限为8A。图3(a)是电机运行中的相电流波形,图3(b)是相电流中脉冲电流变化量波形,图3(c)是A、B、C三相脉冲电流变化量波形。由于需要使用脉冲电流峰值包络线,本文设计了一个低通滤波器,提取脉冲电流变化量的包络线。图4是在转速为1000r/min下得到的三相脉冲电流变化量包络线,每相包络线出现了“驼峰”现象,是由互感和低通滤波所产生的,对特征点交截没有影响。图5是在转速1000r/min下通过A相 和C相的包络线,估计出来的B相转子位置信号,虚线是估计的位置信号,实线是实际位置信号,从仿真结果可看出位置估计误差很小,完全能满足电机驱动的条件。
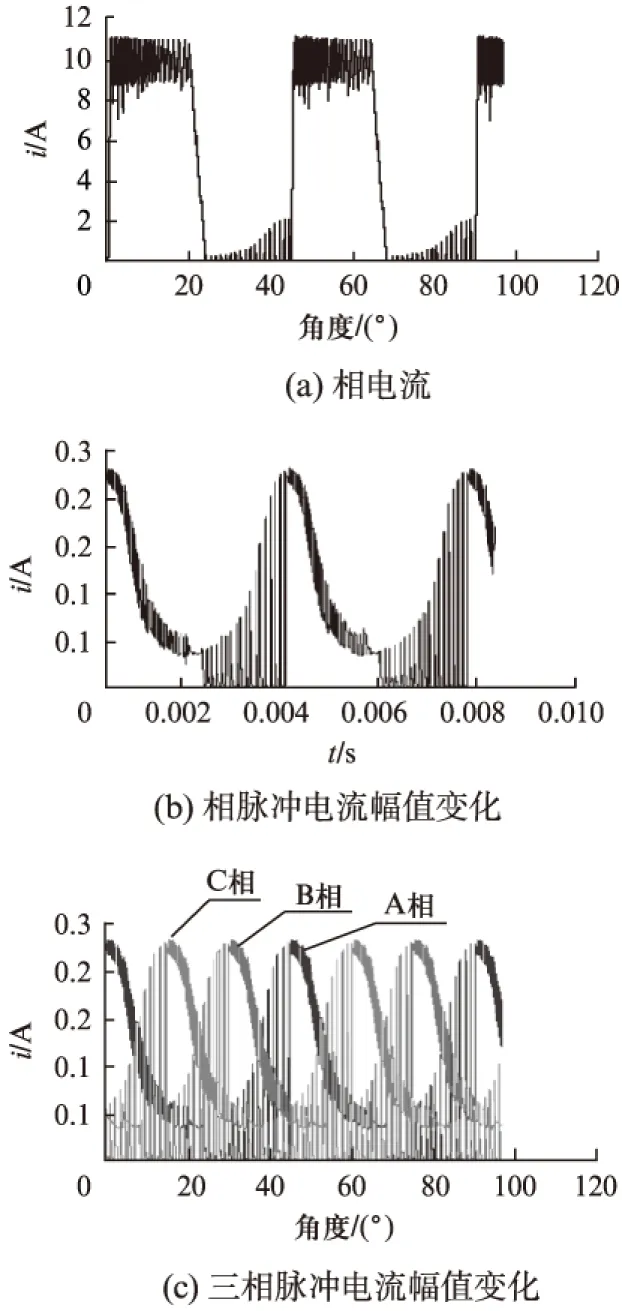
图3 脉冲电流幅值变化曲线

图4 三相脉冲电流幅值包络线

图5 转速为1000r/min估计的B相位置信号
特征点交截法是通过注入脉冲实现的,随着电机转速提高,脉冲电流重叠也就越严重,估计出来的位置误差就越大。本文通过仿真分析了转速对位置估计误差的影响程度。图6是不同转速情况下估计出来的开通角、关断角与实际的开通角、关断角的误差曲线。从误差变化曲线可知: 随着转速增加,误差变大,到了转速750r/min时,开通角的误差发生突变,在转速为0~750r/min内开通角误差变化几乎为0,关断角误差也不大,所以特征点交截法和脉冲注入方法一样非常适合在低速运行状态下。
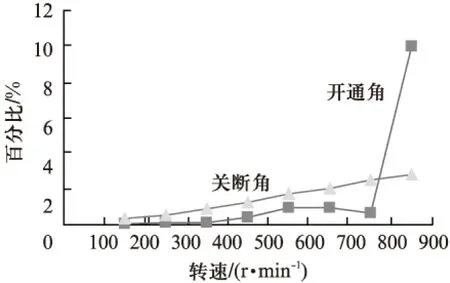
图6 不同转速下开通角和关断角误差曲线
3试验分析
试验样机为三相12/8结构的开关磁阻电机: 额定转速为1500r/min、额定功率为1.5kW、工作电压为270V,高频脉冲频率为2.5kHz,占空比为15%。
3.1初始位置的估计
根据电感与脉冲电流峰值反比关系,本文提出的特征点交截法也可适用电机初始位置的判断。静止时,给三相同时通入短时电压脉冲,然后检测其响应电流的峰值,通过比较响应电流峰值的大小可以推断出初始起动相。表1是三相脉冲电流峰值与初始相判断关系表,通过综合逻辑判断很容易得出初始相。图7是随机初始状态下三相电流脉冲峰值试验波形。由试验波形看出:ia>ic>ib。表1为初始相与脉冲电流峰值关系,通过表1容易判断B相为初始相。
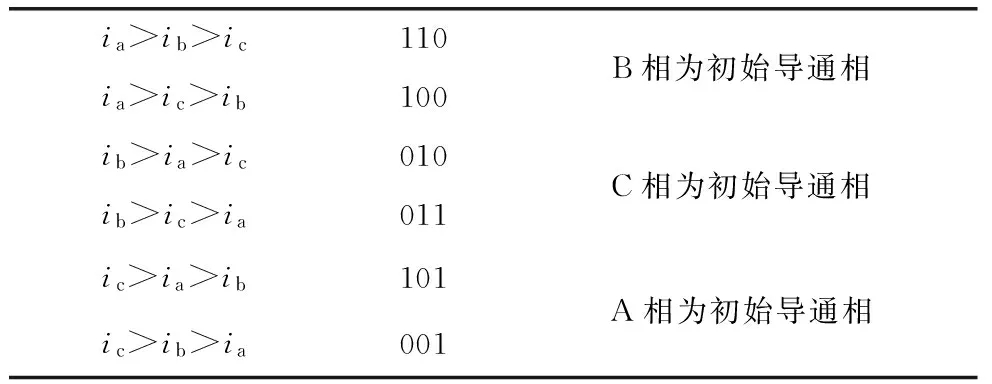
表1 初始相与脉冲电流峰值关系
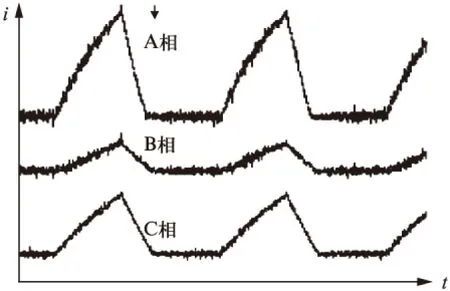
图7 初始位置脉冲电流峰值
3.2起动过程位置估计
在低速运行状态中,通过特征点交截方法估计转子的位置信号。图8是注入的脉冲信号和对应的脉冲电流峰值试验波形;图9是转速为800r/min时,电机的相电流与脉冲电流幅值信号试验波形。从试验波形图可以看出: 与仿真图3(a)、图3(b)一致,通过低通滤器提取出三相电流幅值变化的包络线,利用前面所说的特征点交截方法获取三相位置信号。本文对该方法估算出来的位置信号与样机上安装的光电式位置传感器检测的三相位置信号进行了对比。实际位置信号P与估计的位置信号P*如图10所示。从试验波形看出: 实际位置信号P与特征点交截方法得到的位置信号P*基本一致,完全能满足工程需要。
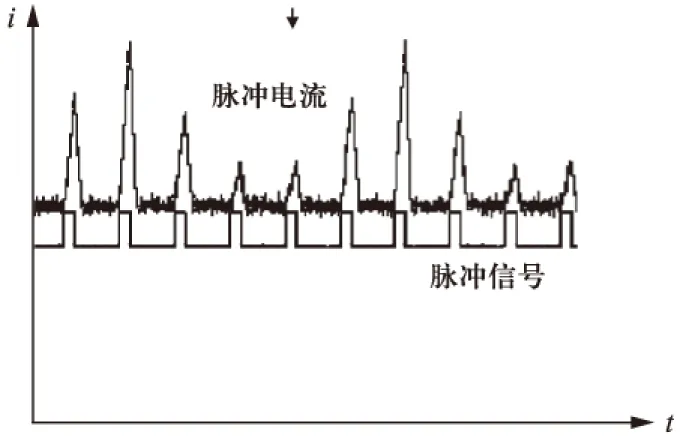
图8 脉冲信号与脉冲电流
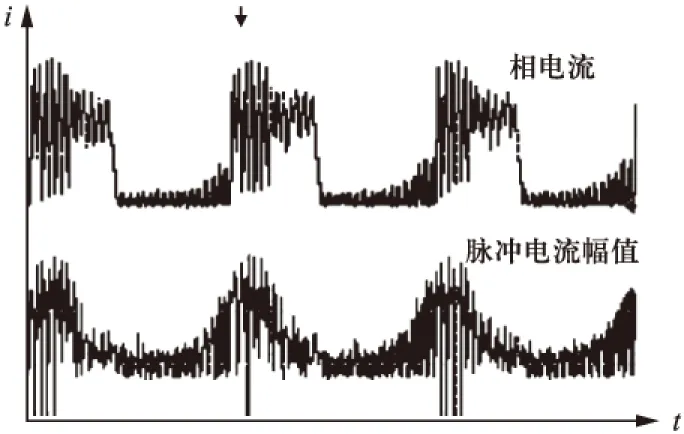
图9 相电流与脉冲电流幅值波形

图10 实际位置信号P与估计的位置信号P*
4结语
本文是在脉冲注入法的基础上,利用电机电感曲线与转子位置的函数关系,提出一种特征点交截的转子位置估计的方法。该方法不需要脉冲电流阈值,算法简单,只需简单的逻辑比较电路就可以得到与光电传感器得到的一样的半周期位置信号,能实现双拍工作。试验结果表明了本文提出的无位置传感器检测方法简单、实用。
【参 考 文 献】
[1]刘迪吉.开关磁阻调速电动机[M].北京: 机械工业出版社,1994.
[2]王宏华.开关型磁阻电动机调速控制技术[M].北京: 机械工业出版社,1995.
[3]陈东升,张淼,张矛盾.基于互感电压的无位置传感器SRM初始位置检测[J].电气传动,2010,40(6): 75-77.
[4]夏长亮,王明超,史婷娜.基于神经网络的开关磁阻电机无位置传感器控制[J].中国电机工程学报,2005,25(13): 123-128.
[5]辛凯.开关磁阻电机滑模观测器间接位置检测研究[D].武汉: 华中科技大学,2007.
[6]李景男,王旭东,周永琴.基于两相脉冲激励的开关磁阻电动机无位置传感器转子位置检测[J].电机与控制学报,2002,6(1): 6-9.
[7]冯雷,刘闯,周强.SRD反串测试线圈的转子位置特征值检测[J].电工技术学报,2008,23(3): 24-29.
[8]ZHANG L, LIU C, ZHU SS, et al. Eigenvalue detection method for SRM rotor position estimation[C]∥In Proc ICEMS’11,2011: 1-5.
[9]毛宇阳,邓智泉,蔡骏,等.基于电流斜率差值法的开关磁阻电机无位置传感器技术[J].电工技术学报,2011,26(9): 91-97.
*基金项目:江苏省自然科学基金项目“开关磁阻电机全速范围无位置传感器及其容错机理研究”(BK20151574);江苏省“六大人才高等”高层次人才选拔对象C类资助项目“面向微网应用的T型三相三电平PWM变换器研究”(2014-ZNDW-003)
作者简介:孙刚(1973—),男,硕士研究生,副教授,高级工程师,研究方向为变换器及电机控制。
中图分类号:TM 352
文献标志码:A
文章编号:1673-6540(2016)06- 0013- 04
收稿日期:2015-11-24
Sensorless Strategy of Switched Reluctance Motor Based on the Eigenvalue Detection Method*
SUNGang,ZHANGLei
(Nanjing College of information Technology, Nanjing 210023, China)
Abstract:The method of injected high frequency pulse for switched reluctance motor was ordinary for sensorless operation of switched reluctance machine. However, the reference current was required, and no double rhythm operating characteristic. The method of eigenvalve detection was proposed , Based on the analysis of the relationship among phase inductance and the rotor position and flux linkage, The high frequency pulse was injected for three phase simultaneity, the envelope of the three pulse current were obtained by low-pass filter. The rotor position were obtained by the cross dot of the three phase current envelope. Finally, the experimental and Simulation results has verified the validity of the method.
Key words:switched reluctance motor; sensorless; eigenvalve detection; injected frequency pulse