
单神经元自适应神经网络PID控制策略在DVR中的应用研究
2016-08-03 01:04蔡宇楼吉培荣张古月
三峡大学学报(自然科学版) 2016年1期
关键词:神经网络
蔡宇楼 吉培荣 陈 成 张古月
(三峡大学 电气与新能源学院, 湖北 宜昌 443002)
单神经元自适应神经网络PID控制策略在DVR中的应用研究
蔡宇楼吉培荣陈成张古月
(三峡大学 电气与新能源学院, 湖北 宜昌443002)
摘要:本文设计了一种用于动态电压恢复器控制策略的具有单神经元自适应神经网络的PID控制器,基于改进单神经元网络控制策略建立了动态电压恢复器控制模型.针对传统PID在快速性和精确电压补偿上的不足,提出改进单神经元自适应控制,形成新型具有自学习的智能控制方法,以提高控制器对信号的跟踪能力和对环境的适应能力.通过Matlab/Simulink的建模仿真,表明所提的控制方法具有鲁棒性强、输出电压稳态精度较高、动态响应速度快等特点.
关键词:电压跌落;动态电压恢复器;神经网络;自适应PID控制;自学习
目前的电力系统中,电压的短时中断以及电压的跌落是发生频率很高的事件,已产生了广泛影响,带来了很大经济损失,是影响设备正常运行和安全用电的重大电能质量问题之一.因此,减缓电压跌落问题的设备研究和应用受到了人们的重视,目前控制电压跌落最经济、最有效的补偿装置是动态电压恢复器(DVR)[1-2].对于控制策略的研究与改进是DVR研究中的重中之重,如何改善控制系统的动态特性,使DVR能达到一个更好的控制状态来保障电能质量的供应,在现在的电力系统研究应用中有重大意义[2].
1996年,在美国西部电子展览会议上第一次提出了关于DVR的研究报告,给出了相关的实验结果.同年,世界首台2 MV·A的DVR在美国的Duke电力公司投入运行.而到了2000年,ABB公司在以色列投产了两套当今世界上最大的DVR(单套容量均为22.5 MV·A).20世纪90年代后期,我国也开始对DVR开展研究,研究内容包括DVR的结构、补偿策略、参数选择、锁相、检测等方面.经过努力探索,中国电力科学研究院成功地研制出了10 kV和380 kV电压等级的DVR,并投入实际运行.
在当前的应用中,双闭环PI控制的DVR占主导地位,其优点是性能好,即稳定并具有较高精度,而且易于在工程应用中实现[3].但PI控制器在补偿精度上存在不足,双闭环PI控制在响应速度和控制精度上还有待提高.
DVR的补偿精确度与控制方法有非常大的关系[4],原因是实现补偿的一个重要环节是由DVR提供的电压来维持敏感负载所需特定电压的状态,从而实现对敏感负载的电压跌落进行精确有效的补偿.
针对上述双闭环PI控制策略的缺点,本文以神经网络智能算法为基础[5-7],由改进的单神经元构成单神经元自适应PID控制器作为DVR的控制部分.该控制策略具有自适应和自学习能力,能适应不同环境的变化,有比较强的鲁棒特性,可以提高系统的准确性、响应速度和补偿效果,能使DVR装置的动态性能得到一定的增强.
1单神经元自适应PID DVR拓扑结构
一般来说,DVR主要由控制单元、储能单元、逆变单元、输出滤波器、串联变压器和旁路系统构成.其结构图如图1所示.储能单元是为了补偿所需的功率,滤波器是为了滤除高次谐波.其中,储能单元选取所给的直流电源,逆变单元则选用三单相全桥结构.当系统电压跌落时,由控制部分感应信号,做出反应传到PWM发生器,再让逆变单元产生相应变化,将通过滤波单元滤波后的电压补偿到系统中.

图1 一种单神经元PID DVR系统结构
对于DVR来说,逆变器的全控器件是提供电压的重要器件.该逆变器使用3个单相全桥的逆变结构,其中的每一相在结构和控制上都是相互独立的[8],因此研究过程中可将其简化为如图2所示的单相结构.图2中,ui是单相逆变器产生的输出电压,Udc是整流器产生的输出电压,iL是电感电流,u0是输出电压.
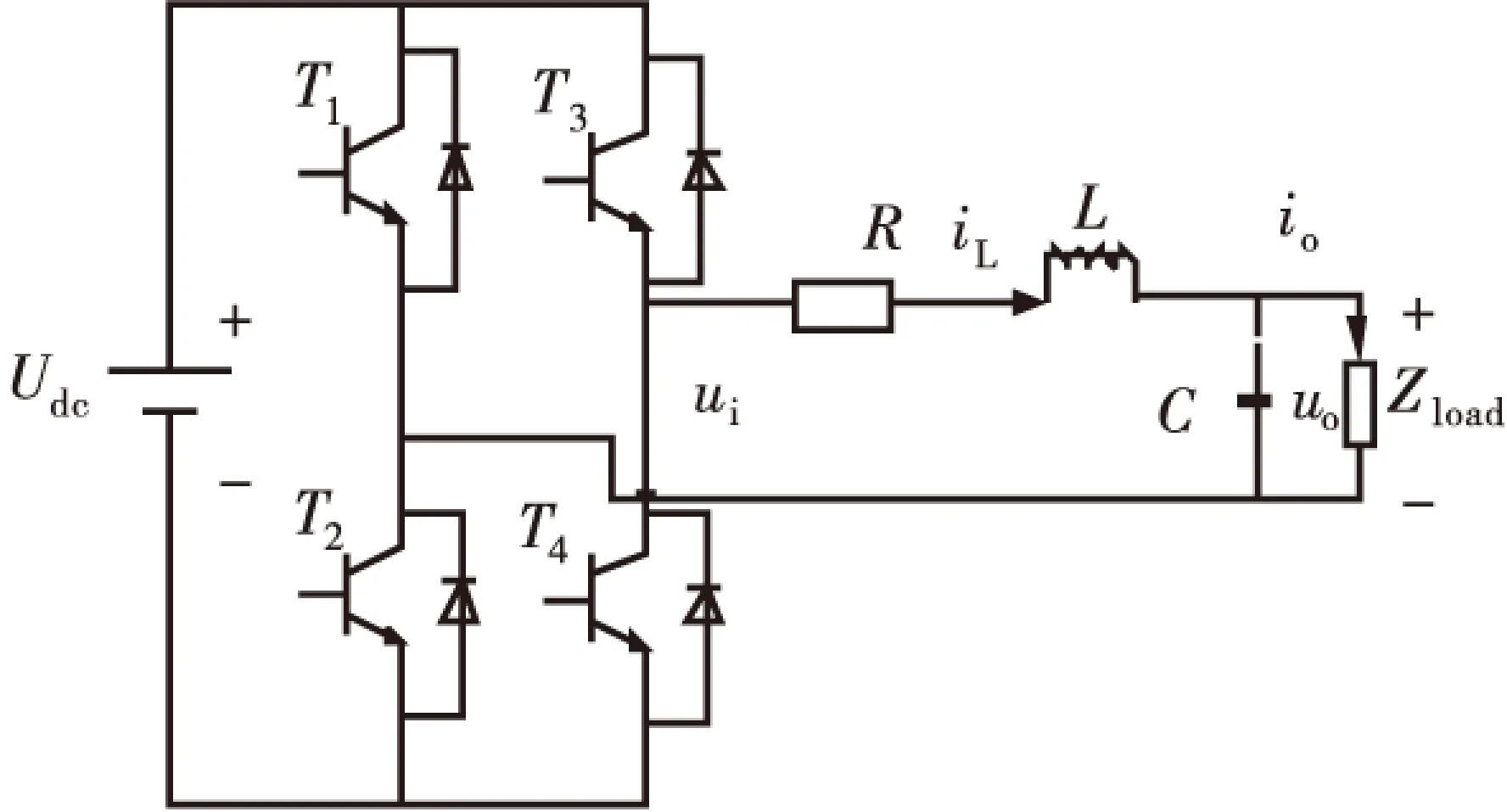
图2 单相拓扑结构
由图2可得如下状态方程
(1)
(2)
2双闭环PID控制策略与基于单神经元结构的自适应PID控制策略
2.1一般双闭环PI控制系统
图3所示为双闭环控制系统框图,外环是负载电压瞬时的反馈控制,内环则是滤波电容电流瞬时的反馈控制.

图3 双闭环PI控制系统框图
图中ur为理想正弦波,KPWM为PWM等效增益.输出反馈电压与给定电压基准信号比较,形成瞬时误差调节信号,经PI调节后作为电流内环的参考值,再与反馈电流比较,经过电流P调节器产生电流误差控制信号[4].
虽然PI控制器中的电流电压双闭环控制策略能够达到一定的控制精度,但PI控制并不能实现无静差控制尤其是在应用到交流系统中瞬态反馈控制的时候[6],会对整个系统的稳定程度产生负面的影响.
2.2单神经元结构的自适应PID控制策略
图4所示为单神经元结构的控制结构框图.通过对加权系数调整,单神经元自适应控制器实现自适应、自组织功能.权系数的调整、设定,按照有监督的Hebb学习规则实现,并使控制系统的设计具有模块化特点.
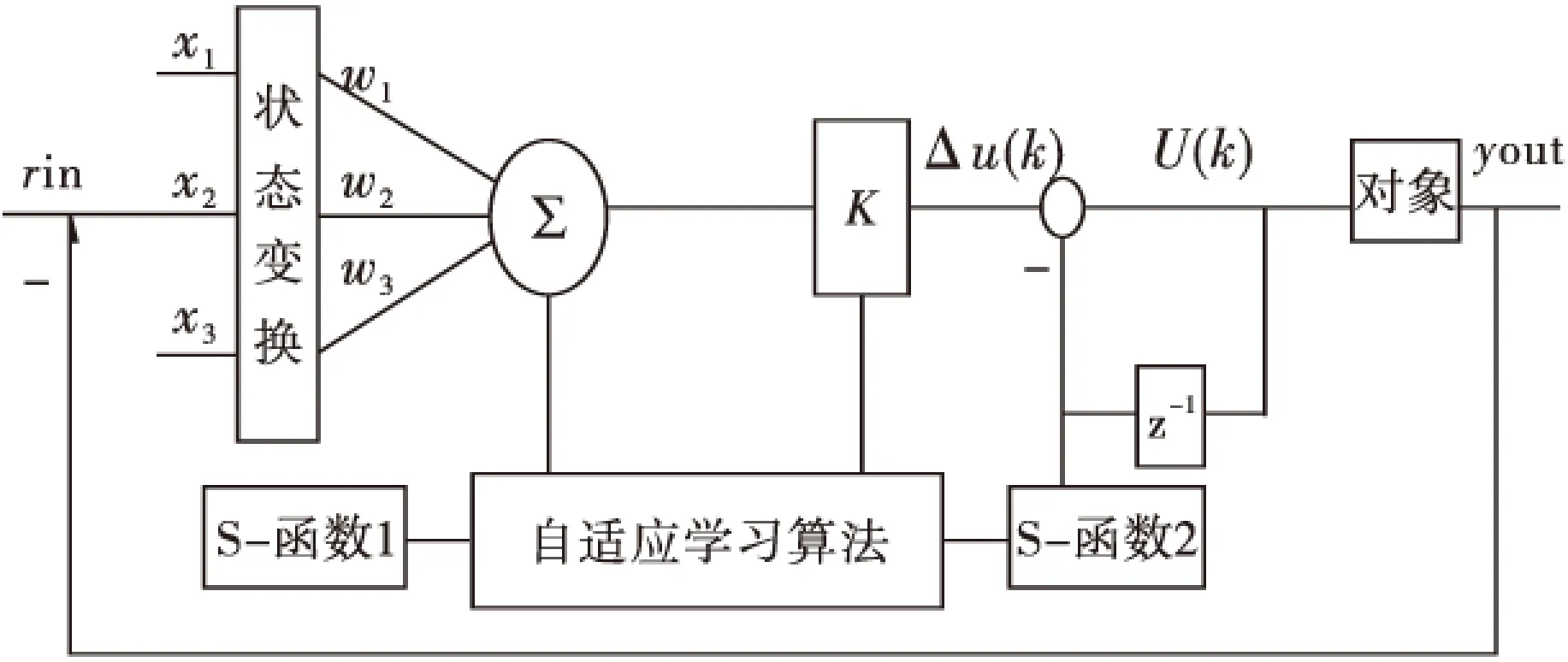
图4 基于单神经元结构的自适应PID控制结构
图4所示的结构中,w1、w2、w3为权系数,神经元通过权系数进行调整来改变PID中的比例、积分、微分的学习速率,然后通过神经网络学习后,再分别由两个S-函数分别调整两个PID控制器的参数来实现整个控制.通过将比例、积分以及微分各个量组合,构成PID控制量,实现对被控对象的控制,其控制规律为:
(3)
式中,kP为比例系数,TI为积分时间常数,TD为微分时间常数.误差和误差的积分及微分三者分别代表了该系统输出的当前和过去及未来的3个状态.
2.3改进的单神经元自适应PID控制
图4中,xi、wi分别为对应神经元的第i个输入以及第i个输入所对应的连接权值,而K则为单个神经元的增益,该参数对系统的快速追踪和抗干扰能力有较大作用,对应的向量式为:

(4)
其中,X和W为输入向量和输入向量连接权值向量,即X=(x1,x2,x3)T,W=(w1,w2,w3)T.
神经元控制器的输出:
(5)
PID相关参数在线修正学习主要是与e(k)和Δe(k)有关,因此可对单神经元PID控制算法的相关加权系数的学习修正部分进行修改,改进以后的算法如下所示:
式中,Δe(k)=e(k)-e(k-1),z(k)=e(k).
上述的改进算法中,权系数的在线修正学习并不是完全根据神经网络的学习原理确定的,而是根据模型的具体情况确定的.ηP、ηD、ηI三者为比例、微分、积分学习速率,K为单神经元比例系数,并且有K>0.比例P、微分D、积分I三者各自采用不同的学习速率ηP、ηD、ηI来调整各自的权系数.
K值的选择非常重要.K越大,则系统具有的快速反应性能越好,但一旦超调量过大,则有可能使系统变得不稳定.当被控制对象时延变大时,K值则应相应减小,从而使系统保持稳定.但如果K值选择过小,则会对系统的快速性产生不利影响.
2.4参数的选择
1)针对阶跃响应,如果输出产生了大的超调,且正弦衰减现象多次出现,则应减少K并维持ηI、ηP、ηD不变;如果上升时间较长,并且不存在超调,则应增大K,并保持ηI、ηP、ηD不变.
2)针对阶跃输入,如果被控对象存在多次衰减,则应减小ηP,并保持其他参数不变.
3)如果被控对象的响应特性出现了上升时间变短、超调变大的现象,则应减少ηI,使其他参数保持不变.若被控对象的响应特性出现了上升时间变长的现象,增大ηI则又导致超调过大,则可适当增加ηP,并保持剩下的参数不变.
4)调整开始时,ηD应选择较小的值,当调整的ηI、ηP和K使得被控对象具有良好的特性时,再增大ηD,并使其他参数不变,则会使系统输出无波纹.
3仿真研究
借助仿真研究方法[9-11],根据前述内容,利用Matlab对该单神经元自适应PID-DVR开展深入研究.系统的具体参数为:电网电压U=220 V、基波频率f=50 Hz、滤波电容为C=60 μF、滤波电感L=60 mH.
仿真试验中,假设电网在0.04~0.12 s时分别发生幅值为30%和50%的电压跌落现象,持续时间为0.08 s,仿真结构图与电网电压跌落与补偿波形如图5所示.一般PID控制的指标数据参照文献[3]得出.
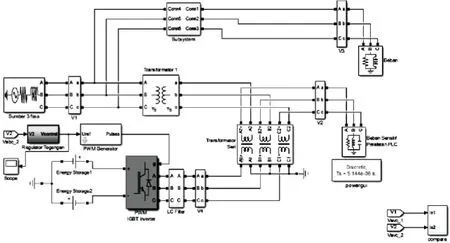
图5 系统仿真框图
3.1电压跌落的幅值为30%补偿结果分析
此时NN-PID控制系统中K=0.001 2,两个PID中学习速率分别为PID1(ηP=1×10-3,ηI=1×10-4,ηD=1×10-15),PID2(ηP=1×10-3,ηI=5×10-7,ηD=1×10-15).
图6中,蓝色为正常电压波形,红色为补偿后电压波形,可见电压跌落在0.04 s时发生.将电压跌落引起的暂态过程放大,可见当电压跌落幅度达到30%时,在0.040 11 s时刻附近由于补偿电压介入使电压跌落回到正常值,整个响应时间约为0.1 ms,动态响应速度较快.超调量为6%,补偿幅度较为准确,稳定时间为0.3 ms.

图6 电压跌落与补偿波形图1

图7 补偿电压质量分析波形图1
3.2电压跌落幅值为50%的补偿结果分析
此时NN-PID控制系统中K=0.001 2,两个PID中学习速率分别为PID1(ηP=1×10-6,ηI=1×10-4,ηD=1×10-15),PID2(ηP=1×10-6,ηI=5×10-7,ηD=1×10-15).
如图8所示,蓝色为正常电压,红色为补偿后电压,可见电压跌落在0.04 s发生.将电压跌落引起的暂态过程放大,可见当电压跌落幅度为50%时,在0.040 12 s时刻附近由于补偿电压的介入使其跌落回到正常值,整个响应时间约为0.1 ms,动态响应速度较快.超调量为6.1%,补偿幅度较为准确,稳定时间为0.4 ms.
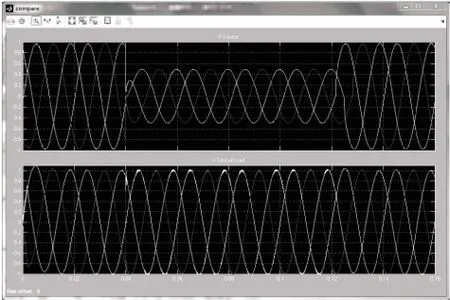
图8 电压跌落与补偿波形图2

图9 补偿电压质量分析波形图2
3.3仿真结果比较
仿真结果归纳见表1和表2.

表1 电压跌落30%的仿真结果比较

表2 电压跌落50%的仿真结果比较
仿真结果表明,改进的单神经元自适应PID的控制策略相比于普通双闭环PID控制,稳定的时间更短,响应的速度更快,有更好的补偿效果.同时,改进的控制策略具有自适应能力,能够不断修正自己的特性从而适应对象和扰动的动态特性变化,还具有自组织和自我调整的能力,使控制智能化.
4结论
本文针对DVR用传统的双闭环PID控制存在的不足,采用了改进的单神经元自适应PID的控制策略.这是一种新的控制方法,是具有自学习和自适应能力的智能PID控制策略,能克服传统PI控制器的不足,而且能适应环境的变化,具有较强的鲁棒性.仿真结果表明了改进控制策略具有改善的响应速度及稳态精度,表明该控制策略是有效和可行的.
参考文献:
[1]陈国栋.动态电压恢复器电压跌落检测算法与控制技术综述[J].电气工程学报,2015,10(5):21-33.
[2]Takushi J,Hideaki F,Hirofumi A.An Approach to Eliminating DC Magnetic Flux from the Series Transformer of a Dynamic Voltage Restorer[J]. IEEE Transactions on Industry Applications,2008,44(3):809-8l6.
[3]许斌斌.基于分数阶控制系统的动态电压恢复器控制策略的研究[D].北京:华北电力大学,2013.
[4]袁性忠,姜新建,黄宇淇.动态电压恢复器的复合控制策略[J].电力系统自动化,2006,30(19):61-68.
[5]赵娟.神经网络PID控制策略及其Matlab仿真研究[J].微计算机信息(测控自动化),2007,23(3-1):59-74.
[6]吴玉香,王聪.基于确定学习的机器人任务空间自适应神经网络控制[J].自动化学报,2013,39(6):806-815.
[7]冯小明.动态电压恢复器理论及仿真研究[D].北京:中国农业大学,2005.
[8]周晖,齐智平.动态电压恢复器检测方法和补偿策略综述[J].电网技术,2006,30(6):24-29.
[9]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2002:87-95.
[10] 谭俊.动态电压恢复器的关键技术研究[D].武汉:华中科技大学,2012.
[11] 黄瀚,杨潮,韩英铎,等.配电网动态电压调节器控制策略的研究[J].电网技术,2002,26(1):1-4.
[责任编辑张莉]
收稿日期:2015-07-26
通信作者:吉培荣(1962-),男,教授,主要研究方向为电力系统运行与控制、电力市场.E-mail:jipeirong@163.com
DOI:10.13393/j.cnki.issn.1672-948X.2016.01.018
中图分类号:TP273
文献标识码:A
文章编号:1672-948X(2016)01-0089-04
Application of Single Neuron Adaptive Neural Network PID Control Strategy to DVR
Cai YulouJi PeiringChen ChengZhang Guyue
(College of Electrical Engineering & Renewable Energy, China Three Gorges Univ., Yichang 443002, China)
AbstractThis paper designs a single-neuron adaptive neural network PID controller used for the control policy of dynamic voltage restorer(DVR) and establishes the control model of DVR under the control strategy of improved neural network. In light of the conventional PID's shortcomings in speed and precise voltage compensation, this paper improves single-neuron adaptive control and forms new self-learning intelligent control method, so as to enhance the abilities of the controllers in tracking signals and adapting to the environment. Through the modeling and simulation of Matlab/Simulink, it is shown that this control method has the characteristics of rapid dynamic response, precise stability of output voltage and strong robustness, etc.
Keywordsvoltage sag;dynamic voltage restorer;neural network;adaptive PID control;self-learning
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年12期)2017-04-23
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
