
电磁导引线位置检测技术研究
2016-08-03 08:55:00吴文灏吴俊蓉黄科乐王击中南大学信息科学与工程学院湖南长沙410083
国防制造技术 2016年1期
吴文灏 吴俊蓉 黄科乐 王击(中南大学信息科学与工程学院,湖南 长沙,410083)
电磁导引线位置检测技术研究
吴文灏 吴俊蓉 黄科乐 王击
(中南大学信息科学与工程学院,湖南 长沙,410083)
以第十届全国大学生“飞思卡尔杯”智能车竞赛电磁导引组为背景,本文研究了不同形状轨道中导引线的位置,进行了传感器的设计,分析比较了曲线拟合算法和差值法的原理及优缺点,最终选用差值法,对竞赛增加的直角轨道以斜向电感值代替外侧两电感值解算位置从而将直角弯道处理为普通弯道,对小S、连续大弯和坡道设计出利用三电感定位电感排布特点识别路况信息的方法,实现了速度规划和舵机动态P控制。
智能车;电磁导引;直角及连续弯道;坡道;三电感定位电感排布特点
当前,无人自主车在减轻军事伤亡和生活智能化方面都有着重要意义,本文以地面无人自主车和第十届全国大学生“飞思卡尔杯”智能车竞赛电磁导引组为背景,研究了不同形状轨道中导引线的位置。电磁导引是最早出现和应用最广的一种导引方式,具有可靠性高、控制策略简单的优点。本文研究的即为电磁感应埋线导引,并对此进行了传感器数量和位置设计,分析比较了不同算法,使用差值法对识别不同路况。
1 直角弯路径识别
从第九届比赛开始,电磁小车引入直角弯道,而直角弯的位置解算与之前不同,因此单独讨论。
电磁小车在通过直角弯道时,x向上的电感值几乎为零没有意义。因此引入斜向电感检测直角。
本文提出两种方案:一是根据上述直角弯道特征,在检测直角弯道时直接给定位置偏差;二是将直角弯道当做普通弯道处理。第一种方式由实际应用来看易出现误判,而第二种方式由于能够很好地解决误判问题,算法兼容性很强,故本文采用第二种方式。
由上述直角弯道特点分析与电感排布展示,可以发现,小车通过直角弯道时,x轴向电感值较小,斜向电感值差值很大。我们可以认为这是直角弯道显著特征。因此当出现这种特征时,我们便利用斜向电感值代替x轴向外侧两电感值进行位置解算。
2 典型复杂路径识别及解决方案
(1)小S弯道
小S弯道的偏移量相对较小,但是赛道曲率中心在不断改变,需要频繁换向,小车在该赛道中容易剧烈抖动,速度快则会跑出赛道。
在电磁小车行驶过程中,通过小S弯道时舵机的转角应当尽量小,才能稳定快速通过。那么,必须在电磁小车通过小S弯道时减小舵机控制的P参数[6],但在通过大弯时需要增大P参数。因此,本文采用可实时调整的P参数,随着弯道曲率的增大P相应变大。同时,对于三电感定位的电感排布方式来说,中间电感的AD值随着位置的绝对偏差的变大而减小,因此本文利用中间电感AD值来进行动态P的控制。
(2)连续弯道
小车在连续弯道里行驶时,从正的偏差快速变到负的偏差,利用这一特点来进行判断。智能车在过连续弯道的时候,必须减速行驶,否则非常容易冲出跑道。
动态P有助于小车通过连续弯道。此外,通过上述位置解算算法所得到的位置偏差精确度高,路径好。但在试验中发现,这样的路径并不适用于高速运动。轮胎侧滑、车体甩尾、高速导致检测不及时等情况都会导致连续弯道路径不好。因此,小车在通过连续弯道时很有必要有一个更强的位置判定来优化路径。
在通过连续弯道时中间电感值一般较小,所以本文通过对中间电感AD值的检测来判定连续弯道,并加强在连续弯道处的位置检测。
(3)坡道
根据实际比赛情况,坡道必须减速。在赛道设计时,坡道不远处便是弯道,不减速则很有可能冲出跑道。
在本课题中,由于采用三电感排布,我们利用中间电感检测坡道。赛道除坡道外几乎都是在同一平面上。无论是上坡还是下坡,中间电感总有一个非常接近导引线的瞬间,将这作为坡道的一个标志,一个为坡道开始,一个为坡道结束。关键语句为:
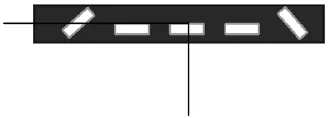
图15 直角弯检测示意图
3 结论
本文根据电磁感应原理进行了小车自主驾驶导引线检测技术的讨论。以“飞思卡尔”杯全国大学生智能车竞赛为背景,进行了电感传感器数量和位置设计,使用5个传感器,采用差值法,对于常规轨道和新增的直角弯设计了相应的检测方案,并对小S弯道、连续弯道和坡道三种复杂路况创新地采用了三电感定位电感排布特点识别并分别设计了相应的方案。实现了舵机的动态P控制。实物实验结果证明了方案的可行性,实物小车成功实现了电磁导引线位置的准确检测,小车平稳运行。
(References)
[1]王能才. 基于电磁导航的智能车信号检测与控制策略研究 [D]. 兰州:兰州理工大学,2002.
[2]胡长辉,叶梦君,汪漫,等. 基于电磁技术的智能车路径识别的研究[J]. 湖北师范学院学报,2011,31(2):54-58.
[3]刘源,张文斌,刘雪扬,等. 电磁导航智能车检测和控制系统的研究[J]. 传感器与微系统,2012,31(4):63-66.
[4]许众. 基于飞思卡尔智能车的电磁导航控制技术研究[D]. 沈阳:沈阳理工大学,2013.
[5]潘明,汪镭,康琦,吴启迪. 基于电磁信号导航的智能车系统设计与开发[J]. 中国科技论文,2014,9(4):407-412.
[6]鲁世斌,蒋先伟,张量,等. 基于电磁传感器的智能车设计与实现[J]. 阜阳师范学院学报,2014,31(1):26-29.
上接P86页
4 结语
综上所述,增压锅炉的工作系统还是相对复杂的,影响锅炉内燃料热力性能的因素也非常多,主要包括炉膛容积热负荷、增压比、蒸汽产量,过热蒸汽温度及经济器出口水温,炉膛理论燃烧温度及炉膛出口烟温,增压锅炉热损失以及管束传热与流动特性等等。其中,很多因素即使通过大量实验验证得出其变化规律,但控制起来有很大的难度,因此,需要相关业内人士不断探索,对相关技术不断改进与创新,最大程度的提高其可靠性,提高其燃烧效率,实现较高的性能指标。
参考文献(References)
[1]周耘,王康,陈思明.工业余热利用现状及技术展望[J].科技情报开发与经济,2010(23 ).
[2]李健民,蔺观江,秦海英.反渗透技术在干熄焦锅炉中的应用与分析[J].工业水处理,2003(12)∶112-114.
吴文灏(1995-),男,湖北咸宁人,研究方向为自动化。
中南大学本科生自由探索计划项目(201510533287)
猜你喜欢
中学生数理化·七年级数学人教版(2023年9期)2023-11-30 03:09:24
汽车实用技术(2022年15期)2022-08-19 02:29:52
露天采矿技术(2022年1期)2022-02-20 03:48:08
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:44
中学生数理化·七年级数学人教版(2017年9期)2017-08-15 00:53:19
河北科技大学学报(2015年6期)2015-03-11 16:16:45
客车技术与研究(2014年1期)2014-03-20 14:34:51
