摄影测量技术在核电蒸发器生产中的应用
2016-08-01 03:07刘来魁
中国科技信息 2016年13期
刘来魁 李 华 蒋 鑫
摄影测量技术在核电蒸发器生产中的应用
刘来魁1李华2蒋鑫2
1.上海电气核电设备有限公司;2.中国科学院西安光学精密机械研究所
刘来魁(1980-)男,工程师,主要研究方向为核电计量检测技术。
基金支持:国家科技重大专项资助项目(2010ZX06001-012)
行业曲线
关于摄影测量技术在核电蒸发器生产中的应用文章的价值点评:
本文针对核电关键设备的生产问题,提出基于显微摄影测量技术的支撑板板孔参数测量方法。在核电生产行业起到关键作用,现已投入正式应用。
点评人:常何民,工作于中科院西安光学精密机械研究所,高级工程师。
为满足蒸汽发生器支撑板板孔的高效、精密、可靠的测量要求,提出基于显微摄影测量技术的支撑板板孔参数测量方法。该方法采用CCD推扫方式和物方远心光路采集板孔完整图像,对数字图像利用形态学滤波、图像分割、边缘提取等方法将图像转为易于分析的二维坐标离散点。然后通过三次样条插值和最小二乘拟合等方法对异型孔的主要参数进行测量。最后对测量数据进行了误差分析,测量精度满足公差要求。现场实验表明,该测量系统具有高精度、高效率、抗外界干扰能力强的优点,实现了系统的设计要求。
蒸汽发生器是核电站的心脏“核岛”三个主要关键部件之一,其内部支撑板的加工是设备制造过程中的关键之一,支撑板直径约φ3880mm,其上分布有19986个异型孔。在加工过程中由于环境、机械等因素影响,不可避免地会出现异型孔的孔位参数与设计值不符的现象。目前对异型孔的检测方法为人工采用尺规等工具进行判断,该方法存在工作量大、效率低、可靠性差,且有对关键参数无法测量的缺点。此外,由于待测对象具有大尺寸、不可移动等特点,传统的检测手段如三坐标测量仪只能对工件的一些关键点进行测量,因此迫切需要有新技术、新设备出现。
现提出一种新型的近景摄影测量技术——基于CCD推扫的异型孔形位参数测量系统,该系统具有非接触、高精度、高效率的优点,可以有效地完成支撑板异型孔位参数的测量工作,目前已成功应用。
测量系统的工作原理
摄影测量是通过成像系统对目标进行拍摄,对获取的图像进行分析计算,再通过物与象的投影关系得到图像待测参数的一种测量手段。本系统的基本工作原理是,通过面阵CCD相机获取异型孔的目标图像,再采用数字图像处理技术将异型孔的边缘特征转化为二维坐标离散点,最后通过拟合、插值等算法实现待测目标参数的计算,其工作原理框图如图1所示。
测量系统组成
整个系统由高分辨率CCD面阵相机、高均匀度低角度散射光源、测量软件、远心镜头、高精度精密支撑架、电控箱、若干标准靶标等组成。
高分辨率面阵CCD相机:用于获取异型孔的图像;
高均匀度低角度散射光源:突出异型孔的边缘,使所成图像稳定、清晰,保证测量结果准确、可靠;
测量软件:采用数字图像处理技术和摄影测量技术对异型孔的形位参数进行针对性测量,对测量数据进行存储、管理以及分析等操作;
物方远心镜头:避免测量过程中工作距离的轻微改变导致系统放大倍率的变化,保证系统的测量精度;
高精度精密支撑架:可承载、微调光电摄影测量仪,保证CCD所成图像方向与拉床运行方向平行;
电控箱:为相机、光源提供稳定可靠的电源;
标准靶标:用于标定成像系统放大率。
硬件设计
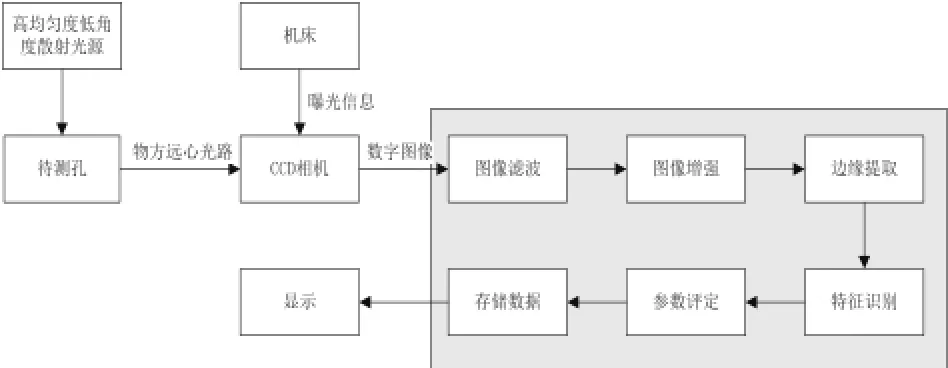
图1 系统原理框图
在硬件设计中,系统主要分为通信传输模块和图像采集模块。系统以龙门拉床为基础平台,利用高精度精密支撑架将测量系统与拉床固定,并预设一系列的触发空间坐标,当测量系统经过触发坐标时,计算机向相机发送触发信号,这样可使图像的获取与拉床的运动协同进行。图像采集时,低角度散射光照射后的异型孔在面阵CCD成像,通过千兆网线传入计算机,在对图像进行处理后得到目标孔参数并加以显示。
推扫模块
本系统采用间歇式触发测量方式,其中拉床、计算机和相机间的通信传输是关键技术。拉床是系统的移动平台,相机通过精密支撑架随拉床平移,机床实时读取机床光纤尺的数据,当机床移动至预设坐标便会通过RS232接口向计算机发送坐标信号,计算机将接收到的信号转换为相机的触发脉冲信号,相机接到信号后采集图像,并将图像数据传入计算机。计算机与CCD相机之间通过采用GigE接口技术的千兆网线进行数据传输,可以保证大量图像数据能够无噪声地累计传输。
图像采集模块
图像采集模块主要由照明光源、高分辨率CCD相机、远心光路系统组成,其主要作用是获取稳定、清晰的异型孔图像。
光源是影响成像质量的重要因素,合适的光源照明设计能够增强图像的边缘特征,可以很大程度降低图像处理算法的难度。针对支撑板的特点,本系统采用低角度前照式散射光源进行照明,该照明方式可以突出目标孔的边缘信息,提高系统的定位和识别精度,保证系统的可靠性和稳定性。
CCD相机的主要参数有分辨率、像素尺寸、帧频和快门时间等,本测量系统采用的CCD相机参数如下:分辨率为五百万像素,最小曝光时间为30μs,像元大小3.45μm,最大帧速为8FPS。该相机可保证系统具有较高的测量精度和较强的抗噪声能力。
本系统采用了物方远心光路技术,如图2所示,该技术在精密测量系统中应用得十分广泛。物方远心光路可以消除物距在景深范围内的变化引起的系统放大倍率的变化,以及光轴与物面的轻微不垂直所引起的误差,这可以降低系统对环境和安装精度的要求,提高系统的可靠性。此外,通过这种光路得到的图像不存在透视变形,图像中的畸变会大大减少,进而减小系统的测量误差。
软件设计
本系统的软件部分包括对图像处理、图像特征识别、数据保存与显示等。本系统首先采用一系列图像处理算法提取出图像特征,再通过数值运算得到目标孔的参数值,与标准模板进行对比评定后输出检测结果,并将数据保存在数据库中。
图像处理
图像处理是指通过图像处理算法增强图像的目标信息后,将图像的目标特征提取出来,为目标特征的检测和测量奠定基础。为了获取准确的异型孔参数,本系统对原始图像采用了平滑去噪、图像增强、图像分割和边缘提取等图像处理算法。
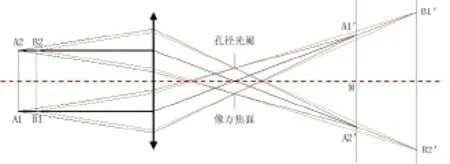
图2 物方远心光路图
图像形态学滤波
在相机采集图像的过程中,由于外界光照不均、CCD光电转换产生的噪声、电子随机噪声等因素,CCD所成图像中会引入一定的噪声,这会对图像特征的识别造成影响,从而影响结果的准确性和稳定性。在本系统中,异型孔边缘对检测结果的影响最直接,这里采用了形态学滤波器对图像进行滤波处理。形态学滤波器不同于传统滤波方法,它是通过“结构元素”与图像卷积运算进行处理,基本运算是膨胀和腐蚀运算,其数学表达式分别是:

其中,式(1)为膨胀运算,式(2)为腐蚀运算,Db和Df分别表示输入图像f(x,y)和结构元素b(x,y)的定义域。
将形态学膨胀和腐蚀运算以不同顺序结合起来便可以构成形态学开、闭运算,其运算表达式分别为:
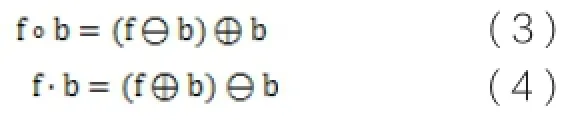
形态学开运算可以消除图像“尖峰”噪声,形态学闭运算可以消除“凹谷”噪声,将两者以不同顺序组合可以得到形态学滤波器,本系统采用的是形态学开—闭滤波器:

由于形态学滤波是一种非线性滤波,它通过结构元素对图像进行几何形态变换得到输出图像,因此它能够在有效滤除噪声的同时最大程度地保留原始图像的几何特征,以便于进一步分析图像。
图像分割
为了检测图像特征需要将目标与背景分离,图像分割时必不可少的一步,而分割时阈值的选取是处理时的难点和重点。目前,常用的阈值选取方法有波谷法、双峰法、最大类间方差法和最大熵法等。在本系统中,由于目标孔与背景的灰度级有较明显的差别,而且经过滤波和图像增强后噪声已很小,十分适合采用最大类间方差法。
最大类间方差法以类间方差作为阈值判定标准,其基本原理是选择最佳阈值将图像直方图分为两类,使两类的方差达到最大值。设I是一幅具有L级灰度的图像,灰度值为i的像素数为Ni,图像总的像素个数为,第i级像素出现的概率为,图像的平均灰度为。设阈值k将所有像素分为两类:C0和C1。C0的平均灰度为,C1的平均灰度为两类产生的概率分别为:。
边缘提取
图像中的边缘是目标孔与背景之间的灰度变化产生,即反映的是目标孔的轮廓信息,因此异型孔参数的测量精度取决于提取出的边缘精度。目前像素级的边缘提取方法已经相当成熟,常用的有Roberts算子、Sobel算子、Log算子、Canny算子以及形态学边缘提取等方法。上述算法只能将目标边缘定位在像素级精度,为了在不提升硬件成本的基础上获取更高的测量精度,需要进行亚像素边缘提取算法对图像进行处理。亚像素边缘提取的实现通常分为两个步骤:粗定位和精定位,即先利用先前所述的边缘提取方法获取像素级边缘,再利用亚像素边缘提取方法得到亚像素边缘。
在本测量系统中,首先对分割后的图像进行形态学边缘提取,再利用基于链码的轮廓跟踪技术得到目标孔的像素级边缘信息,最后根据目标孔与背景灰度差较大的特点,利用空间矩来得到轮廓的亚像素边缘。空间矩法是根据目标在成像前后的矩不变性建立理想模型从而获得亚像素边缘的,其基本思路是选择单位圆为采样模板,边缘将圆区域分为两部分,其中一部分灰度值为h,另一部分为h+k,则二维连续图像p,q阶空间矩为:

其中,p,q为大于零的整数。

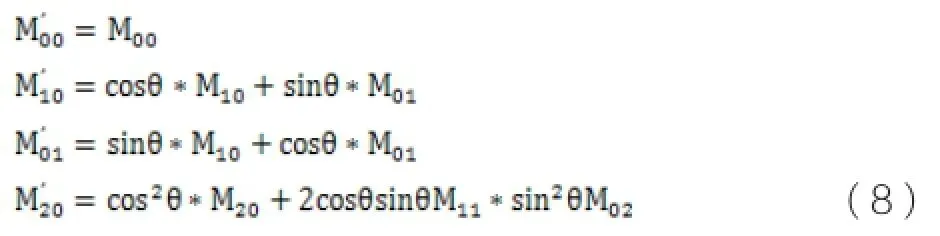

结合旋转后垂直于边缘的矩与边缘参数的关系,便可得到边缘的亚像素位置:
图像特征识别
图像特征识别是一个从图像到数据的过程:对图像中的特征信息进行检测和测量,获得其客观信息从而建立对图像的描述。图像特征识别的基本过程是先对检测出的亚像素边缘点进行去脏点处理,然后通过数值运算计算得到目标特征的参数。在本测量系统中,由于异型孔轮廓绝大部分是由圆弧和直线构成,因此需要对获取的边缘点进行曲线插值或拟合的方法进行计算。
三次样条插值
在对边缘进行拟合前,为了减小边缘提取结果中随机误差对精度的影响,需要采取插值的方法对数据进行处理。本系统采用的三次样条插值法是逼近函数的一种方法,它具有良好的收敛性和稳定性,这里分别对轮廓边缘点x,y方向上的坐标进行三次样条插值。
这里以x坐标为例,对坐标数组{xi}用三次多项式去拟合相邻xi之间的曲线,三次样条插值函数S(x)为:


参数拟合
在本系统中,异型孔轮廓绝大部分是由圆弧和直线构成,因此在参数计算过程中,大量采用了直线拟合和圆拟合,这里采用基于最小二乘法对边缘点进行拟合。
对于直线拟合,设n个点到拟合直线垂直距离的平方和为:


实验分析
实验
实验以西门子SINUMERIK840D系统控制下的沈阳机床型龙门拉床为平台,通过精密支撑架将测量系统与拉床刀头夹具固定,在实际现场对支撑板底孔参数进行测量。系统以VS2008开发平台开发软件系统,实验步骤及相关数据如下:
利用制作的标准园工件获得标定系数,标定后的像素当量为15.6818μm/pixel。
选定五个任意孔按固定顺序进行七轮测量,限于篇幅,下面列出部分参数测量数据,如表1所示。
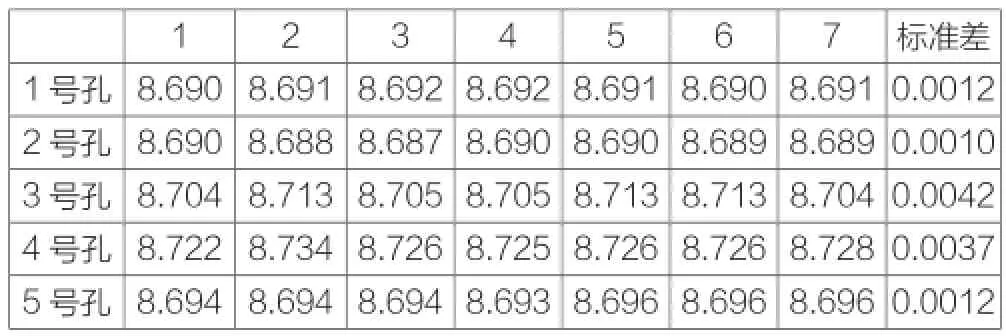
表1 底孔半径测量结果
根据测量误差理论,系统的容许误差取最大标准差的3倍,即0.0126mm,精度满足系统的设计要求。
误差分析
测量系统误差的主要来源有成像系统畸变、标定误差、CCD固定噪声和算法误差。成像系统畸变主要由镜头畸变引起,本系统采用的物方远心镜头视场畸变只有0.02%,所引起的误差极小。对标定误差,利用标准件在视场不同区域多次测量的平均效用来提高像素当量的标定精度。算法误差主要是由边缘提取精度引起,边缘定位精度为0.2pixel,测量误差为0.003mm。因此,对镜头进行畸变校正、采用抗噪声能力更强的边缘提取算法可进一步提高测量精度。
结语
本系统以近景摄影测量技术为基础,采用高分辨率CCD相机和物方远心光路获取图像,结合数字图像处理算法,实现了支撑板异型孔参数的非接触、高精度、快速测量。系统检测单孔时间约200ms,测量精度为0. 0126mm,达到了系统设计指标,实现了人工检测向高精度自动检测的转变,提高了核电关键设备的生产效率和制造水平。
DOI:10.3969/j.issn.1001- 8972.2016.13.040
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
红领巾·萌芽(2019年8期)2019-08-27
中国临床医学影像杂志(2019年2期)2019-04-25
中国与非洲(法文版)(2017年10期)2017-11-23
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
中国继续医学教育(2015年2期)2016-01-06
中国当代医药(2015年36期)2015-03-11
振动、测试与诊断(2014年6期)2014-03-01
雕塑(1999年2期)1999-06-28