基于视觉的四旋翼无人机目标跟踪系统设计
2016-07-31 21:17:27姜俊俊
中国科技信息 2016年14期
姜俊俊 李 明 张 宇
沈阳航空航天大学航空航天工程学部
基于视觉的四旋翼无人机目标跟踪系统设计
姜俊俊 李 明 张 宇
沈阳航空航天大学航空航天工程学部
四旋翼无人机也称四轴飞行器、四旋翼无人飞行器,是一种能垂直起降的无人飞机。它有四个螺旋桨,通过改变自身螺旋桨转速实现各种飞行动作。
和固定翼无人机相比,四旋翼无人机有着很好的运动特性,可以在狭小区域垂直起降,可以在固定目标上悬停监视,同时还可以贴地飞行从而有效的躲避雷达探测。同无人直升机相比,四旋翼无人机的机械结构比较简单,由于通过平衡四个螺旋桨产生的升力来实现稳定的盘旋和精确飞行,比较容易控制。
四旋翼无人机的上述特点,使得其非常适合做为在复杂的城市环境或山区下,用于对目标侦测和跟踪设备的机载平台。在这种环境下,小型四旋翼无人飞机能够垂直起降,具有“悬停和凝视”目标能力,而且还可以抵近建筑物飞行,对目标物提供精确定位,而且能依靠四个螺旋桨产生的升力进行姿态与位置控制。
本文提出一种基于APM的四旋翼无人机搭载无线摄像头的目标跟踪系统。
以四旋翼无人机为平台,以摄像头为传感器,建立的目标跟踪系统,可以在低空、低速的条件下,对地面目标进行实时的跟踪飞行,在军事和民用方面有着广阔的应用前景。在军事方面,该系统能够从狭小地域上放飞、在复杂空情中灵活机动的完成低空的侦察任务,监视战场进行损伤评估等。在警用方面,可以在反恐任务中监视犯罪分子的活动,也可完成缉毒和反走私任务。同时,在民用方面同样大有可为,可负责重大的自然灾害后的监视巡逻和跟踪目标的任务,可进行大桥、高压线、水坝以及地震后路段的检查,航拍和成图,可用于空中监视城市的环境状况和交通状况,还可用在地质环境的监测上。因此,研究基于视觉的四旋翼无人机目标跟踪系统具有重要的科学意义。
系统总体方案设计
本项目设计并开发的基于视觉的四旋翼无人机跟踪系统,主要包含了APM(ArduPilotMega)飞控板、摄像头和图像传输模块以及数据传输模块四个主要模块。该系统的结构如图1所示。图像传输模块固定在四旋翼上。跟踪开始时,摄像头观察运动物体的位置,完成视场内视频图像的拍摄,拍摄的视频图像通过无线视频传输方式传到地面PC机,用于图像处理,以获得目标位置。
四旋翼无人机飞行原理
四旋翼无人飞机是由固定在刚性十字交叉的结构上四个独立的电机驱动的系统。四只螺旋桨分别安装在十字形机体的四个顶点位置,首先规定了一个正方向,位于同一对角线上两只螺旋桨为同一组,左右电机安装正桨逆时针旋转(产生顺时针方向的扭矩),前后电机安装反桨并且顺时针旋转(产生顺时针方向的扭矩),因此连接在同一十字架结构上可以抵消两两相互之间的反扭距,通过控制四个电机的转动速度来实现飞行器的飞行控制。
根据飞行器的飞行原理可以知道,飞行器的飞行状态主要包括偏航飞行,左右(横滚)飞行,前后(俯仰)飞行以及悬停;
(1)悬停飞行:如图2.1所示,四个旋翼以相同转动速度旋转时可以抵消两两相互之间的反扭力矩;悬停飞行模式通过同时增大或同时减小四个旋翼的转速,实现飞行器上升或者下降运动;
(2)俯仰或者横滚飞行:如图2.2所示,由于飞行器结构的对称,对角线方向增加其中一个螺旋桨的转速,同时减小另一个螺旋桨的转速,实现俯仰或者横滚飞行运动;
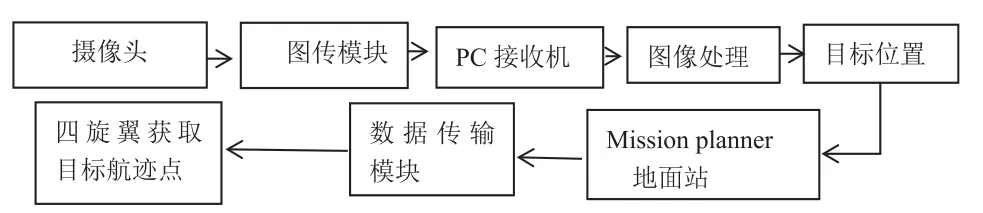
图1 基于视觉的四旋翼无人机目标跟踪系统结构图
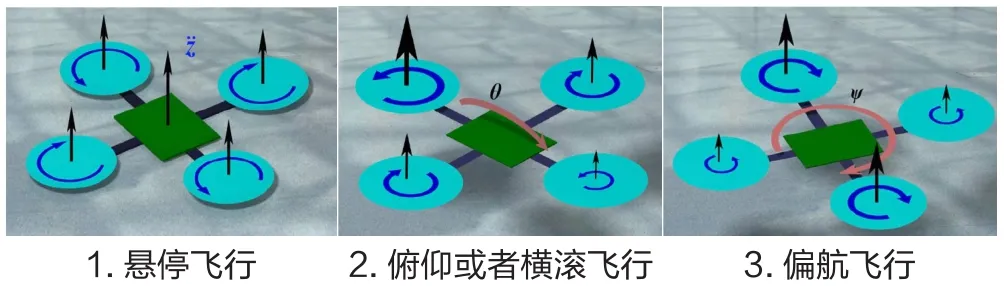
图2 四旋翼无人机飞行原理示意图
(3)偏航飞行:如图2.3所示,增加对角线一组螺旋桨的转速,同时等量减小另一组对角线螺旋桨的转速,实现飞行器偏航运动。
硬件系统设计
(1)主控单元选择
ArduPilotMega(APM)是市面上比较强大的基于惯导的开源自驾仪。
特性包括:
免费的开源固件,支持多旋翼(四旋翼,六旋翼等),飞机("ArduPlane”),地面车辆("ArduRover”)以及直升机("ArduCopter”)。
通过点击式的工具简单设置和上传固件。
通过点击式的桌面程序完全的规划任务脚本。
可以支持上百个三维航点。
使用MAVLink协议,支持飞行中的控制命令模式和双向遥测功能。
多种免费的地面站平台,包括Mission planner,支持任务规划,空中参数调整和完整的带回放的数据记录。
跨平台性。支持Windows,Mac以及Linux。在Windows下使用图形任务规划设置的工具(Mac下可用模拟器)或者在任何操作系统下使用命令行界面。以上三种操作系统都有可用的地面站开发源程序。基于Arduino编程环境编写,也是完全跨系统的。
自动起飞,降落和特殊的动作命令,例如视频和照相控制。
(2)摄像头的选择
根据本系统要求选定的带云台的高清航拍摄像头。如图3所示。
(3)无线传输模块
无线传输模块包括无线图像传输模块和无线数据传输模块。无线图像传输模块采用创兴科BOSCAM 5.8G 32频点图像传输模块,该模块包含无线图像发送模块(TS832)和无线图像接收模块(RS832),如图4所示。无线数据传输模块采用3DR 433MHz数据传输模块,该模块包含无线数据发送和无线数据接收模块,如图5所示。

图3 摄像头

图4 图像传输模块

图5 数据传输模块
四轴飞行器的软件设计
四轴飞行器的软件设计主要包括PC机处理接收机接收的图像信息以及Mission Planner地面站的二次开发,用于将目标的位置转化为航迹点,实时发送至四旋翼,达到跟踪目标的目的。整体软件在Visual Studio环境下采用C#语言编写。
在视觉跟踪系统中,要保证目标始终在摄像机视野范围内,这是实现视觉导航和四旋翼控制前提,比较常见的办法是安装摄像机云台,控制云台的三维姿态使目标始终位于摄相机的图像中心位置。当目标丟失的时侯,要采取比较恰当的搜索方法,使得目标位于图像的中心位置,常见的搜索方法是固定航线搜索机制同时控制摄像机云台视角,使得目标位于图像的中心,实现搜索到目标。由于考虑到四旋翼机载重量的限制,所以选用的跟踪平台不带摄像机云台,采用四旋翼机载单目固定的摄像机结构,故而选取提升四旋翼飞行高度的搜索方法。当丟失目标以后,首先要根据目标预测的运动轨迹跟踪一会儿,在搜索不到目标的情况下使用爬升搜索模式。当搜索到目标后立刻切换到跟踪模式。四旋翼跟踪移动目标的飞行方式流程图如图6所示。当接到地面站发送移动目标方位命令给四旋翼后,首先要进行目标搜索直到目标进入机载相机的视野,然后根据目标移动的信息进行目标轨迹预测,再根据预测的运动轨迹进行四旋翼的跟踪控制模式,实现对地面移动目标的实时跟踪。

图6 跟踪流程图
结语
本文描述了一个简易四轴飞行器系统的设计并搭载图像传输模块实现目标的跟踪,整个方案分为APM控制板和摄像头及图像传输模块,数据传输模块四部分,通过无线数据模块进行控制通信。图像传输模块用于将采集的图像传输至PC机,用于地面控制四旋翼无人机跟踪目标。APM飞控板采用一体设计使得系统简单、紧凑,图像传输模块使得图像采集简单易行,且不影响主控制器处理速度,最终实现飞行器的基本运动以及图像的实时传输。实践证明,该四轴飞行器飞行稳定、可靠,图像画面及时,清晰,取得了较好的效果。
姜俊俊,就读于沈阳航空航天大学 航空航天工程学院探测制导与控制技术专业大四学生。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
航空发动机(2020年3期)2020-07-24 09:03:16
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47