
Y9030D型通用圆度仪的设计
2016-07-30 03:15:18江纯清刘金秀熊子健姬惠立
轴承 2016年11期
江纯清,刘金秀,熊子健,姬惠立
(1.洛阳轴研科技股份有限公司,河南 洛阳 471039;2.河南省高性能轴承技术重点实验室,河南 洛阳471039;3.滚动轴承产业技术创新战略联盟,河南 洛阳 471039)
圆度、波纹度是轴类及轴承零件的主要参数,圆度误差的存在直接影响轴与轴承的配合精度、旋转精度、摩擦、振动和噪声等,使得整机的振动、噪声、润滑及密封受到影响,进而影响到整机的精度、噪声和使用寿命。
Y9030D型通用圆度测量仪是依照国家标准设计[1],以精密气浮主轴为基准,采用计算机控制、测量的转台式圆度测量仪,可用于轴类及轴承零件的圆度、波纹度等参数的精密测量。
1 工作原理及主要技术指标
Y9030D采用半径法测量原理,工作台回转方式。工件放置在与空气主轴轴线相对垂直的调平调心工作台上,位移传感器固定在可X,Y向移动的精密直线导轨上,移动测头接触工件,调整工作台使工件回转中心与主轴回转中心基本重合,工件随主轴带动的工作台旋转,传感器在工件被测截面测量工件的半径变化量,通过信号采集、数据处理,计算并显示出工件圆度、波纹度等参数。仪器结构如图1所示。
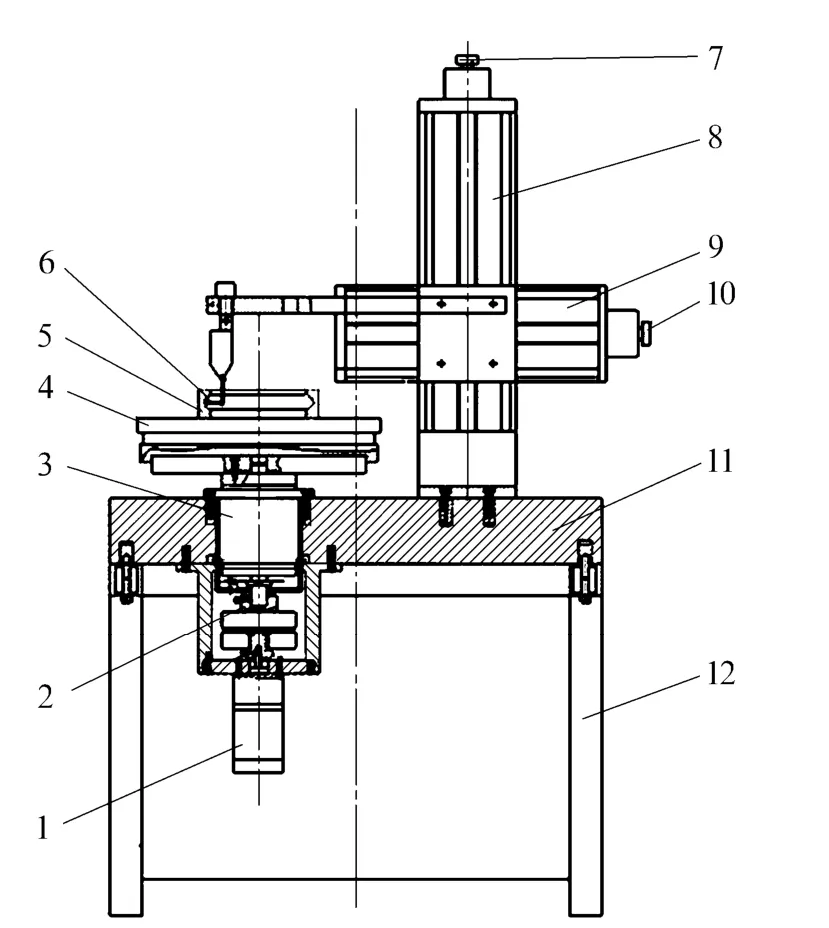
图1 Y9030D结构示意图Fig.1 Structure diagram of Y9030D
Y9030D的主要技术指标如下:测量参数为圆度和波纹度;主轴误差(径向精度)±0.025μm;系统综合精度0.06μm;波段范围为(1~15)UPR,(1~50)UPR,(1~150)UPR,(1~500)UPR,(1~1 500)UPR,(15~500)UPR和(15~1 500)UPR;评定方法采用最小二乘圆、最小区域圆、最大内接圆及最小外切圆;轴向载荷500 N;主轴转速2~6 r/min内有级可调;测量范围为φ5~300 mm,最大高度为400 mm。
2 机械结构设计
2.1 高精度气浮主轴的设计
高精度主轴是半径法圆度仪的核心部件,作为测量的定位基准,其旋转精度应优于0.06μm。因此,以静压空气主轴[2-3]为基础,在保证设计精度的同时,针对主轴轴向承载较大(500 N)的特点,改进了主轴结构设计。改进后的主轴结构如图2所示,采用了双止推结构,保证了适当的轴向间隙和径向间隙,并设计了合理的节流孔排布形式和尺寸。
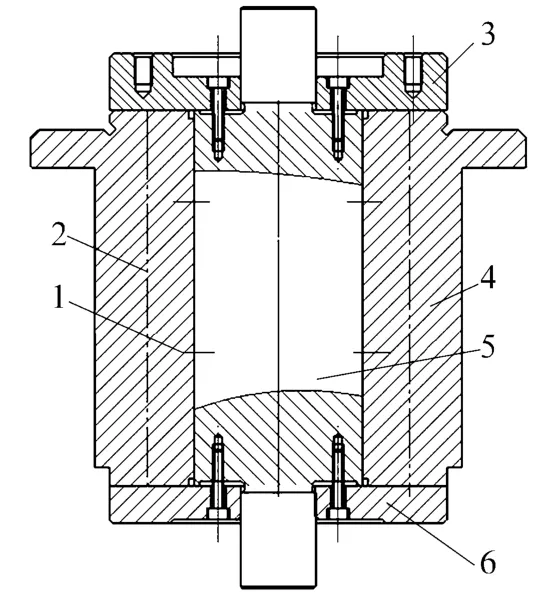
图2 主轴结构示意图Fig.2 Structure diagram of spindle
2.2 调平调心工作台
调平调心工作台是一种浮动式工作台,用于调整被测工件的状态。调平是将回转工作台的工作面调整至与空气主轴的回转轴线垂直,调心则是将被测工件的几何中心调整至与空气主轴回转轴线重合,其原理如图3所示。
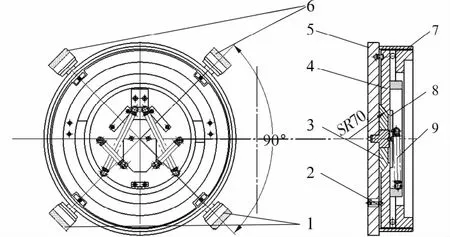
图3 调平调心工作台Fig.3 Centring and leveling worktable
调平调心工作台由主工作盘、浮动工作盘和定位工作盘等3块圆形工作盘通过1个球冠和3排钢球组合而成。主工作盘和浮动工作盘用SR75球冠支承,浮动工作盘和定位工作盘通过三排φ12 mm的钢球支承,3块工作盘之间的可调整量由7根弹簧实现,并由调整限位块防止互相脱离。
调平时,转动调平旋钮,与主工作盘相对固定的球冠在浮动工作盘中旋转,主工作盘台面发生倾斜,通过2个相对垂直的调平旋钮实现工作台的调平功能。调心时,转动调心旋钮,浮动工作盘通过钢球在定位工作盘上平行移动,带动主工作盘沿与回转轴线垂直的方向移动,通过2个相对垂直的调心旋钮实现工作台的调心功能。
2.3 低振动主轴驱动设计
高精度空气主轴的驱动是一个关键技术点,由于空气主轴的特性,其抗附加力矩的能力较差,设计中应尽量避免驱动电动机自身振动产生的影响,并选用合适的柔性联轴节。因此,驱动电动机选用专用的小型、高输出功率、高效率的无刷调速电动机,其运行噪声小、振动低且为闭环控制,速度变动率低至±0.2%,测量过程中的速度稳定性好,运行平稳;连接方式采用非接触的永磁式连接方式,具有软启动、隔振效果好、寿命长等优点;此外,在机架上采用了效果良好的气垫式减振方法,降低了环境振动对仪器的影响,提高了仪器的测量精度。
2.4 直线导轨平移台
Y9030D采用了专用的防尘电动平移台。平移台采用精密直线导轨(方导轨)结构,精密滚珠丝杠推进,导程2 mm,整步分辨率25μm,重复定位精度±1μm,运动直线度2μm/400 mm,两相混合式步进电动机驱动。直线导轨可自动消除间隙,移动时运动平稳,静止状态稳定性好,保证传感器在测量过程中的基准稳定可靠。
3 电气及软件设计
3.1 电气控制原理
电气部分硬件由电感式位移传感器及信号调理电路、主轴电动机及其控制电路、I/O接口、多功能数据采集卡、圆光栅编码器、双轴步进电动机及驱动器、限位及接口电路、运动控制卡和计算机组成,电气控制框图如图4所示。
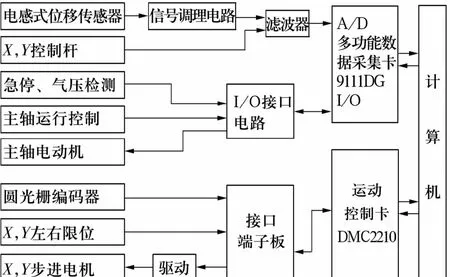
图4 电气控制框图Fig.4 Diagram of electrical control section
Y9030D采用计算机作为中央处理单元及控制中心,实现移动控制、位移信号采集、数据处理、图形显示、存储、打印等功能。计算机利用分体式圆光栅编码器产生的每转2 048的脉冲信号,同步记录与位移传感器信号相对应的圆周方向角度信号。多功能数据采集卡PCI-9111DG具有16路单端模拟量输入12位A/D转换器,采样速率100 kHz,共32路I/O。运动控制选用DMC2210 PCI总线2轴运动控制卡。硬件电路集成度高、稳定性好,保证了仪器的测量精度和长期稳定性,符合现代测量仪器的智能化发展趋势。
3.2 高精度电感测头及信号调理电路
低噪声信号的采集是精密测量的基础。位移传感器采用了自制的加长杆结构差动电感式旁向传感器,重复误差0.05μm,量程±0.5 mm。信号调理电路选用AD698线性位移差分传感器(LVDT)专用芯片[4]作为测量电路的核心芯片,其自身集成了内部振荡器、相位解调器、初级放大器和辅助放大器,原理框图如图5所示。
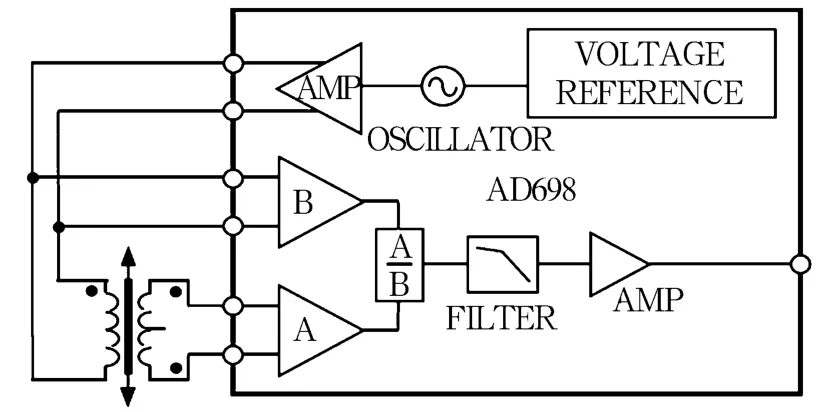
图5 AD698原理框图Fig.5 Functional block diagram
在电路设计时,关键元件选用了低噪声、低温漂的元器件。调理电路向传感器提供正弦波激励信号,激励频率和激励电压幅值的选取考虑了传感器的特性,经反复试验后将激励电压定为3 Vrms,频率定为12 kHz,频率精度高于±0.9%。信号的初级放大器及鉴相电路直接利用了AD698芯片内置的高稳定性电路,其中初级放大器的增益误差小于±1.0%FS,二级放大器及多量程通道设计了2节无限增益多端反馈(MFB)切比雪夫低通滤波器[5]。电路具有集成度高、噪声小、灵敏度及分辨率高、线性度好、工作稳定的特点,可满足高精度测量的需要。
3.3 运动控制
控制电路选用的DMC2210[6]是一款基于PCI总线、以ASIC为核心的性能优越、功能强大的运动控制卡。设计中应用LabWindows/CVI编程工具,通过板卡提供的适用于Windows操作系统的DLL函数库进行编程,用其控制低噪声数字式步进驱动器,分别驱动X,Y轴两相混合式步进电动机控制安装在平移台上传感器的测量位置。导轨两端安装有光电式限位检测开关,限位信号接入运动控制卡,防止运动超量程。圆光栅A/B相正交编码器信号接至运动控制卡的28位二进制正/反位置计数器输入端口,用于检测工作盘的旋转角度。
3.4 基于Windows的专用测量分析软件设计
虚拟仪器是计算机、仪器和信息技术相结合的产物,其通过软件将计算机强大的计算处理能力与硬件的测量、控制能力结合在一起,实现智能仪器的数据采集、分析处理、显示和存储功能。Y9030D的软件设计采用LabWindows/CVI虚拟仪器软件开发平台[7-8],开发的应用程序运行在Windows操作系统上,程序流程如图6所示。
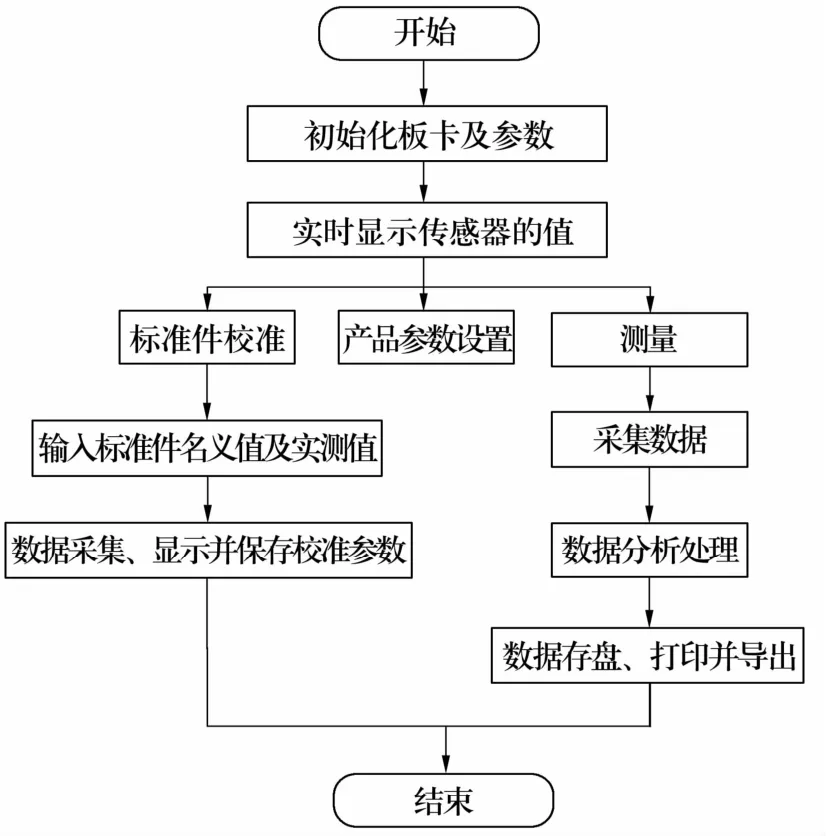
图6 程序流程图Fig.6 Flow chart of program
仪器的显示界面如图7所示,分为参数设置、测量控制、数据和图形显示、谐波分析、斜率分析、数据保存与打印等模块。可显示各个滤波段的圆度值、偏心、偏心角度、最大谐波及其幅值,也可选择需要计算的参数、滤波范围、评定方法(最小二乘圆、最小区域圆、最小外接圆、最大内切圆)、图形放大倍数等。
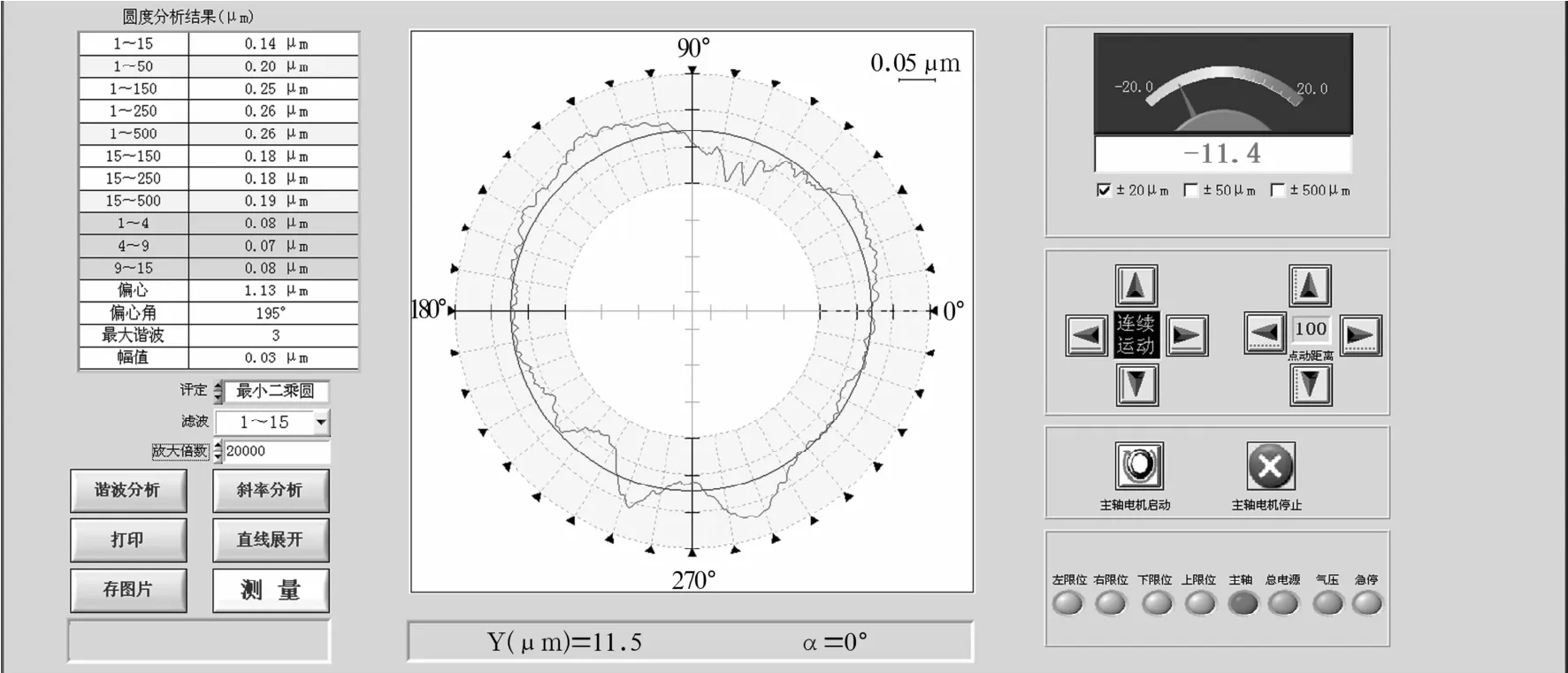
图7 仪器显示界面Fig.7 Interface of instrument
除主要圆度测量功能外,谐波分析可给出构成工件轮廓曲线圆度波纹度各个谐波成分的幅度数值,指导用户改进加工工艺;斜率分析可对代表被测工件轮廓图形的数据进行一阶微分,给出被测工件轮廓曲线相对不同分析窗口的变化率。斜率分析的工程意义在于:相同的圆度波纹度值,若斜率值不同,则较大斜率值的被测工件在滚动轴承中引起的振动较大。
4 实际应用
出厂前按公司圆度仪检验规程对Y9030D进行了测试,主要检验项目见表1,由表可知,Y9030D的各项指标均符合要求。另外,经过一年多的生产现场使用,Y9030D的测量精度完全满足用户要求,且运行稳定可靠。
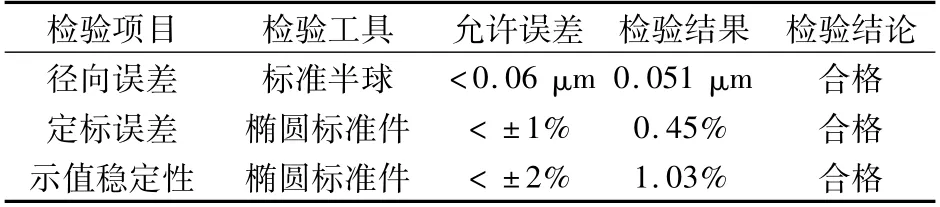
表1 出厂检验报告Tab.1 Factory inspection report
Y9030D属于低速、通用型圆度测量仪,测量精度高,操作方便,应用范围广,目前已形成Y90xxD系列产品,可推广应用于汽车、机床、航空航天等精密机械制造企业以及大专院校、科研院所、计量单位等研究机构。
猜你喜欢
制造技术与机床(2019年11期)2019-12-04 05:50:40
制造技术与机床(2019年7期)2019-07-22 03:43:08
制造技术与机床(2019年7期)2019-07-22 03:42:28
制造技术与机床(2017年9期)2017-11-27 02:13:56
制造技术与机床(2017年8期)2017-11-27 02:10:01
制造技术与机床(2017年3期)2017-06-23 08:11:33
邢台学院学报(2016年4期)2016-02-28 19:54:41
电子测试(2015年18期)2016-01-14 01:22:53
电子工业专用设备(2015年4期)2015-05-26 09:10:40
电机与控制应用(2015年3期)2015-03-01 03:49:46
