
基于ADVISOR的纯电动汽车参数匹配及仿真
2016-07-26 06:22:05郭敏锐高迎春黄淮学院电子科学与工程系河南驻马店463000
赤峰学院学报·自然科学版 2016年9期
郭敏锐,高迎春(黄淮学院 电子科学与工程系,河南 驻马店 463000)
基于ADVISOR的纯电动汽车参数匹配及仿真
郭敏锐,高迎春
(黄淮学院 电子科学与工程系,河南 驻马店 463000)
摘 要:仿真技术是研究开发纯电动汽车的关键技术.在深入研究分析汽车仿真软ADVISOR的基础上,利用ADVISOR对纯电动汽车进行动力性能的建模与仿真.以某纯电动汽车为例,主要在典型的道路工况CYC_UDDS进行动力性能的仿真,并且比较两种不同变速器下整车动力性能仿真结果,合理匹配蓄电池组、电机及其控制系统、变速器等参数,使纯电动汽车的动力性能发挥最佳.
关键词:ADVISOR;动力性;仿真;纯电动汽车
纯电动汽车是仅使用蓄电池作为汽车动力源的一种清洁环保型交通工具.它有良好的操作性,无噪声以及振动,较低的空气阻力,较低的空气阻力系数,较高功率密度和高效率的电机驱动技术以及高比能量,高比功率的能量产生和存储技术,并拥有智能化的能量管理系统.电动汽车可以较好地解决城市环境污染问题,缓解石油短缺问题,大量节省能源.因此纯电动汽车将成为未来汽车工业的发展趋势[1],研究开发纯电动汽车将非常重要.
目前国产的纯电动汽车的开发设计并不是将汽车的油箱和发动机替换成蓄电池和电动机,它必须对能量存储装置、动力装置、变速器、主减速器等参数进行合理的匹配[2].各部分参数匹配的是否合理,决定了电动汽车动力性能的好坏.利用仿真软件ADVISOR[3-5](Advanced Vehicle Simulator,车辆高级仿真器,它是基于MATLAB和SIMULINK环境下开发的软件对这些所选装置进行建模仿真,检验参数匹配的是否合理,并且比较仿真结果,最后作出合理选择.
1 ADVISOR的基本结构
ADVISOR由输入模块、仿真模块、输出模块、控制模块四部分组成.输入模块定义建模仿真所需要的基础变量,或者调用修改其它的输入模块程序,基础变量包括整车参数和部分总成参数[6].仿真模块是模型程序及模型构成,它包含由输入模块推导的仿真方程式.输出模块对模型输出作出计算及后续处理,比如画出符合要求的图像和计算出某些车辆性能参数.控制模块作用在于控制仿真过程,不但控制输入,且控制输出模块.ADVISOR的数据框图如图1.1所示.

图1.1ADVISOR仿真数据流程图
从以上ADVISOR仿真的过程可以看出,道路循环工况输入到控制模块,再根据车辆的性能要求定义初始变量,修改好相应的仿真模型,再利用仿真模块计算出车辆的实际车速、最大加速度、最大爬坡度等结果,然后再次仿真计算,以便进行优化处理,这样不断循环,直到完成整个仿真过程,最后通过输出模块仿真出动力性参数图像、经济性参数图像、排放性参数图像和数据.
2 建立ADVISOR的输入脚本
2.1 主要部件的选择
目前电动汽车上采用电池一般为可更换、可充电、可拆卸的蓄电池.比如免维护型铅酸电池和动力电池(磷酸铁锂离子电池)等.蓄电池选择既要考虑比能量、比功率的影响因素,也要考虑使用寿命、容量、充电时间、使用成本等因素.该电动汽车所用的蓄电池为锂离子电池.
电动机是纯电动汽车的重要组成部分,蓄电池的化学能转换为电能,再转换为电动机的机械能,经过传动系转换为车轮的动能,或者在制动工况、减速工况时,通过控制系统将车轮上的动能反馈储存在蓄电池中.目前应用较广泛的电动机是交流异步电机.由于交流电机优点突出,体积小、效率高、调速范围宽、技术成熟、价格便宜、可靠性好,有效的回馈制动能量[7].因此选择交流异步电机作为驱动电机.
2.2 主要部件参数设计
本文以某纯电动汽车作为研究对象,应用ADVISOR软件主要对动力性能进行仿真.该纯电动汽车选用的是磷酸铁锂电池组,工作总电压为277V,交流异步电机的峰值功率为83KW,其主要部件如表2.1所示.
3 建立ADVISOR主要部件的仿真模型
3.1 蓄电池组仿真模型
蓄电池组仿真模型总成包括电压和内阻子模块、电流子模块、功率限制子模块、SOC(蓄电池荷电状态)子模块等.电压和内阻子模块根据电池组的工作温度,SOC,输出功率来计算开路电压和电阻.电流子模块根据电功率定义求得电池组的电流.功率限制模块主要用来防止电流的功率超出限制范围.SOC子模块是关于电池组温度的函数,通过连续迭代确定SOC值.蓄电池子模块用来计算蓄电池组的工作温度.

表2.1 蓄电池组和电机的匹配参数
3.2 电机及其控制系统仿真模型
电机仿真模型包括转速模块、转矩模块、温度控制模块、转动惯量模块等.转速限制模块确保电机运转平稳,转速不能过高,不能过低,保证电动汽车快速启动.转矩限制模块保证转矩输出在一定的范围内,不能高于电机的峰值转矩.转矩计算模块用来计算电机的输出转矩.温度控制模块可以防止电机的温度过高,影响电机的性能和效率.
4 整车动力性能仿真结果
4.1 典型工况的仿真
上述步骤完成后,仿真即可开始.选择使用UDDS(Urban Dynamometer Driving Sched-ule)作为道路循环行驶工况,也可选择其它工况.工况即为模拟车辆实际行驶的工作情况.UDDS工况由美国环境保护署EPA开发制定.其中单次行驶里程是11.99km,需用时间1369s,停车17次,设置最高车速91.25km/h,最大加速度为1.48m/s2,空载时间259s.车辆速度随时间变化如图4.1所示,从图中可以看出实际车速在循环工况车速范围内.图4.2为交流异步电机输出转矩,在车辆行驶过程中,转矩为正值,电动机通过传动系驱动车辆.在车辆制动或减速时,转矩为负,通过控制系统回收制动能量.可有效延长电动汽车行驶里程,节能减排.电机转速的仿真结果见图4.3,从图中可看出在停车时间,交流异步电机停转,与内燃机怠速工况相比,可大大减少尾气排放.
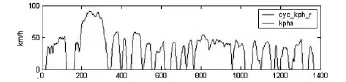
图4.1 道路循环行驶速度

图4.2 电动汽车电机输出转矩

图4.3 电机输出转速
4.2 两种变速器的仿真比较
利用ADVISOR仿真软件对两种变速器进行动力性能的仿真,一种是TX_1SPD变速器,另一种是TX_5SPD变速器.前者利用电机变速,后者是五档手动变速器.仔细比较两种变速器动力性能的仿真结果,并为最后合理选择变速器提高理论研究基础.

表4.1 两种变速器对整车动力性能影响比较
从以上表4.1两种变速器对整车动力性能影响可以看出,匹配有TX_1SPD动力性能显然要优于TX_5SPD变速器,前者最大行驶速度比后者多35.8%,前者最大爬坡度要比后者多10.2%,这说明选用TX_1SPD变速器与锂离子电池组、电机匹配关系良好,能够达到对整车动力性能的标准要求.
5 结论
在设计开发电动汽车时,建模仿真技术可有效减少科研经费,合理优化选择各个部件参数,缩短开发周期.通过合理匹配锂离子蓄电池组,交流异步电机,TX_1SPD变速器等系统参数,并利用ADVISOR对其进行仿真分析与比较,得知该纯电动汽车在最大行驶速度、加速时间、最大爬坡度等方面达到并且超过动力性能标准,说明该电动汽车的动力系统设计匹配方案是合理可行的.
参考文献:
〔1〕麻友良,严运兵.电动汽车概论[M].北京:机械工业出版社, 2012.
〔2〕孙重祥,曾志斌.电动汽车的基本知识[J].实用汽车技术, 2006(2):7-8.
〔3〕杨超.电动汽车动力学建模与仿真研究[D].武汉:武汉理工大学汽车学院,2007.
〔4〕张翔,赵韩,钱立军,张炳力.电动汽车仿真软件ADVISOR的应用[J].交通科技与经济,2004(07):6-11.
〔5〕刘灵芝.基于ADVISOR的电动汽车性能仿真研究[J].安徽电子信息职业技术学院学报,2006(06):37-42.
〔6〕张翔.电动汽车建模与仿真的研究[J].博士后研究工作报告,2004.21-25.
〔7〕Jecongmin Kim,Chiman Park,Sungho Hwang,Yoichi Hori,Hyunsoo Kim.Control Algorithm for an Independent Motor-Drive Vehicle.IEEE Trans,on Vehicular Technology.Vol 59,NO.7,September,2010.
中图分类号:U462
文献标识码:A
文章编号:1673-260X(2016)05-0045-02
收稿日期:2016-01-09
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:42
上海师范大学学报·自然科学版(2018年3期)2018-05-14 13:47:10
青春岁月(2016年22期)2016-12-23 15:56:15
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
广西科技大学学报(2016年1期)2016-06-22 13:10:38
科技视界(2016年4期)2016-02-22 20:52:35
现代经济信息(2016年1期)2016-01-25 14:04:44
