一种多电航空发动机双定子动力磁浮轴承
2016-07-25 08:18张武徐丽娟
轴承 2016年7期
张武,徐丽娟
(中国航空研究院 新技术研究所,北京 100012)
许多现代化工业领域如航空航天、高速机床、涡轮分子泵、离心机、压缩机、飞轮储能等都受到摩擦阻力的制约。磁浮轴承技术具有无接触、易于实现主动控制,且不需要专门的气压及液压系统等优点,已成为机电领域中的重要研究方向之一[1-4]。
多电发动机是一种采用磁悬浮技术的新型发动机,其取消了传统的密封系统和滑油润滑,利用电气化传动附件代替机械液压式传动附件,实现发动机电气化传动,简化了涡扇式发动机的传动装置及启动系统结构,最终达到减少故障、提高可靠性及发动机推重比的目标[5-6]。
传统的动力磁浮轴承或无轴承电动机的悬浮力与转矩之间存在相互耦合,为了能够实现稳定的转矩控制和悬浮控制,相应控制算法非常复杂[7-9]。文献[7]基于平均悬浮力及平均转矩的思想,研究了无轴承开关磁阻电动机的控制策略;文献[8]通过神经网络系统的训练构成逆系统,实现无轴承电动机的线性化和动态解耦。现研究一种新型多电发动机双定子极动力磁浮轴承,其悬浮力由内定子产生,电磁转矩由外定子产生。与传统动力磁轴承相比,该磁轴承悬浮力和转矩可以进行独立控制,实现悬浮力和转矩之间的解耦,并且在任意的转子角度位置都可以保持稳定的悬浮运行。
1 运行机理
1.1 结构与原理
新型双定子极12/8动力磁浮轴承的结构如图1所示,图中给出的是在一个三相系统中只有定子A相绕组导通的情况。电动机由2种定子组成,外定子用来产生电磁转矩,为转矩极定子;内定子用来产生悬浮力,为悬浮力极定子。转矩绕组A由转矩极A1,A2,A3,A4上的线圈串联构成;悬浮力极P1,P2,P3,P4上设计互相独立的线圈,构成了x轴和y轴方向的悬浮绕组。图中,i1,i2,i3,i4为内定子悬浮绕组电流;ima为外定子转矩绕组电流。
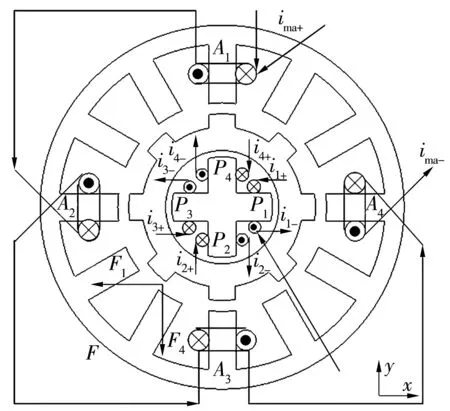
图1 双定子型动力磁浮轴承结构
当转子在x轴正方向发生偏移时,电流i1导通,悬浮力极P1产生沿x轴负方向的悬浮力F1;当转子沿y轴正方向发生偏移时,电流i4导通,悬浮力极P4产生沿y轴负方向的悬浮力F4。F1和F4合成F,其大小和方向可以通过控制悬浮绕组的电流来进行调整,使转子达到稳定悬浮。图中的正负号表示绕组电流的正负。
磁力线分布图如图2所示。当悬浮绕组通电后,沿x轴正方向及y轴负方向的磁通增加,从而分别产生沿x轴负方向及y轴正方向的悬浮力,悬浮绕组产生的磁场可以控制转子的悬浮。
1.2 控制方案实现
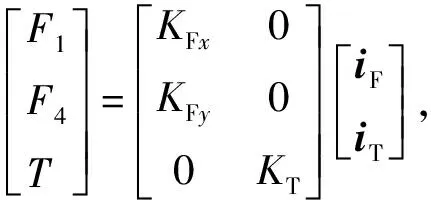
动力磁浮轴承的悬浮力及转矩可以表示为

图2 磁力线分布图
KFx=KF(cosθF-sinθF-cosθFsinθF) ,
KFy=KF(sinθFcosθF-sinθF-cosθF),
KF=μ0N2LstkRβr/2g2,
KT=μ0N2LstkR/4g,
式中:T为转矩;iF为悬浮电流;iT为转矩绕组电流;iA,iB,iC分别为A,B,C三相绕组中的电流;KF为端部电感系数;KT,KFx,KFy均为悬浮力系数[6];μ0为真空磁导率;N为绕组匝数;Lstk为电动机长度;R为转子半径;g为气隙长度;βr为内定子的极弧角度;θF为合力F与x轴正方向的夹角。
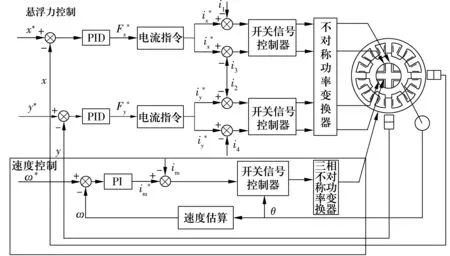
图3 控制系统结构图
通过不对称功率变换器,采用磁滞控制方法对悬浮绕组电流进行控制。动力磁浮轴承的绕组开关状态见表1,状态1为变换器供电模式;状态0为续流模式;状态-1为变换器回馈模式。

表1 绕组开关状态
2 转矩与悬浮力特性
采用有限元法对动力磁浮轴承进行分析,产生的悬浮力如图4所示。由图可知,系统的悬浮力非常平稳,在给定电流的情况下,悬浮力几乎不随转子位置角的变化而发生改变,故能够使用更简便的算法和更小的电流来控制悬浮力。

图4 悬浮力特性
转矩电流保持为2 A,改变悬浮绕组控制电流,动力磁浮轴承的输出转矩如图5所示。由图可知,不同悬浮绕组电流下,输出转矩并不随轴承的悬浮位移发生改变,因此轴承的转矩不受悬浮力控制的影响。
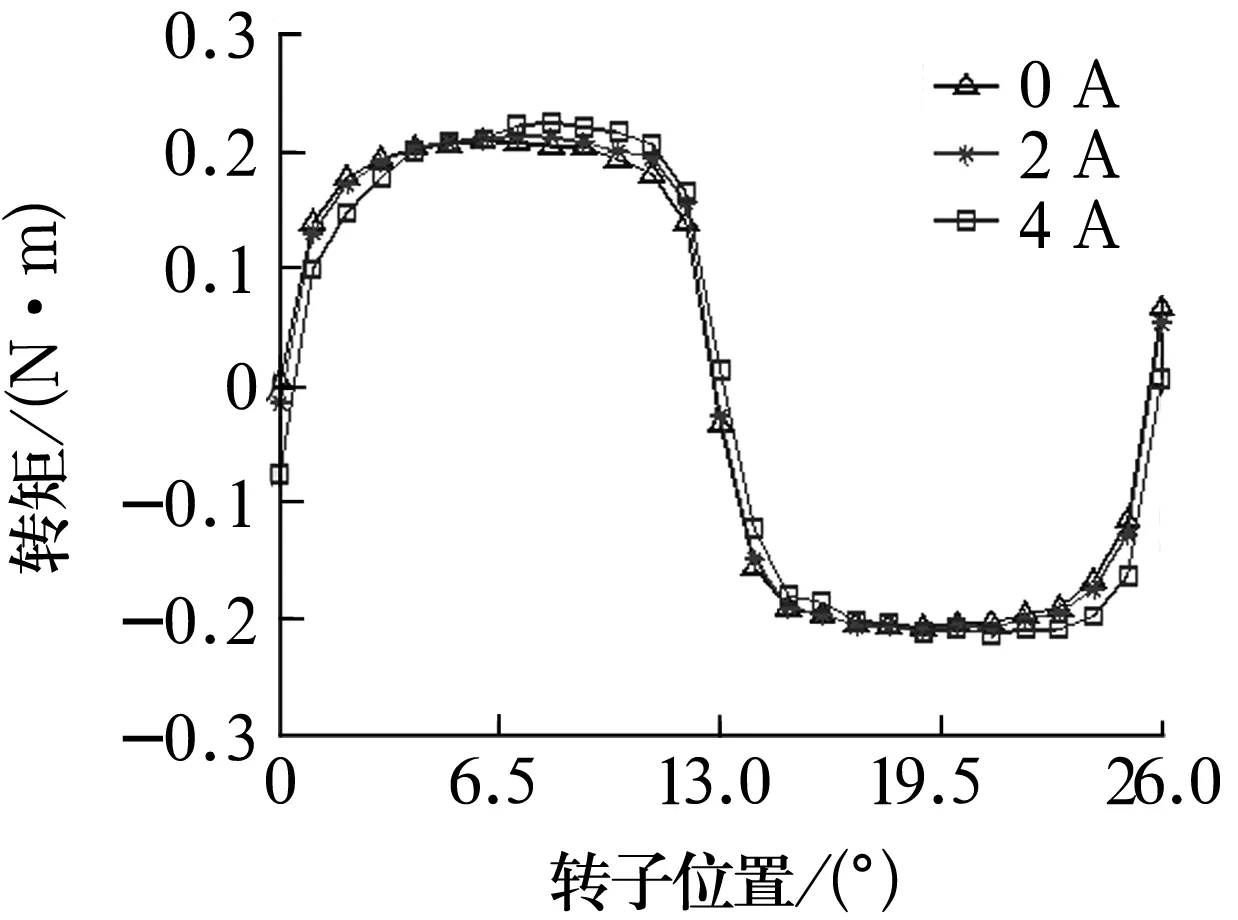
图5 不同悬浮绕组电流下的转矩
悬浮电流保持为2 A,改变转矩绕组电流,动力磁浮轴承的悬浮力如图6所示。由图可知,不同转矩绕组电流下,悬浮力几乎不随轴承的悬浮位移发生改变,证明悬浮力不受转矩电流的影响,因此该动力磁浮轴承的悬浮力和转矩可以分别进行独立控制。

图6 不同转矩绕组电流下的悬浮力
3 试验结果及分析
以动力磁浮轴承、DSP2812、不对称功率变换器、编码器以及位移传感器为核心,搭建了试验平台(图7),传感器和编码器分别检测转子位移和转速信号,反馈到DSP再由其产生控制信号,驱动不对称功率变换器实现对轴承的控制。

图7 试验平台
转子保持不转且在悬浮端可以自由移动,在转子x,y轴上同时施加10 N的悬浮力,在2.5 s时悬浮,通过改变悬浮绕组电流对悬浮位置进行调节,静态时起浮试验结果如图8所示,由图可知,转子可以快速运行在平衡位置,完成起浮过程。

图8 静态时起浮试验结果
起浮后保持转速1 000 r/min,x,y轴的载荷从10 N减小到0 N,悬浮力突变时的试验结果如图9所示。由图可知,悬浮绕组电流随着悬浮力的突变而减小,保证转子在平衡位置的稳定运行。

图9 悬浮力突变时的试验结果
转子静态起浮后,转矩绕组电流导通,转子无偏心位移且悬浮在平衡位置,以1 000 r/min的速度稳定旋转。5 s时使转子从1 000~2 000 r/min加速运行,试验结果如图10所示。由图可知,当转速增大时,转矩电流迅速增加,以实现对转速的调节,此时转子仍然在平衡位置保持稳定悬浮,并且过渡过程中转子偏心误差很小,轴承可以稳定运行。此外,当转速发生变化时,悬浮绕组电流和转子悬浮位置均不变,说明转矩电流对悬浮力不产生影响,该动力磁浮轴承的悬浮控制和转矩控制可以实现独立解耦。

图10 加速运行试验结果
4 结束语
针对多电航空发动机研制了一种12/8双定子动力磁浮轴承。通过有限元分析可知,该动力磁浮轴承可以产生相互独立可控的转矩和悬浮力,同时悬浮力不随转子位置的变化而发生改变,可以简化控制算法。 在静态起浮、悬浮力突变和动态时调速等情况下,该动力磁轴承能够稳定运行,且转子的偏心误差较小,同时转矩绕组电流变化对悬浮力不产生影响,进一步证明了转矩与悬浮力可实现独立解耦。
猜你喜欢
防爆电机(2022年2期)2022-04-26
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
微特电机(2015年1期)2015-07-09