OPCM阵列驱动器力学性能分析
2016-07-23 07:58:18王自平张肖凡曲怡霖
淮阴工学院学报 2016年3期
王自平,张肖凡,曲怡霖,余 乐,杨 东,李 晨
(江苏大学 土木工程与力学学院, 江苏 镇江 212013)
OPCM阵列驱动器力学性能分析
王自平,张肖凡,曲怡霖,余乐,杨东,李晨
(江苏大学 土木工程与力学学院, 江苏 镇江 212013)
摘要:用于电声转换的超声相控阵驱动器是超声相控阵检测系统的关键组成部分,针对复杂工程结构损伤特性及现有超声相控阵检测技术中驱动器存在的不足,将压电正交异性复合材料(OPCM)应用于阵列结构的驱动器研制中,可实现驱动器定向驱动作用。通过数值仿真,建立了单一OPCM元件及OPCM阵列驱动器在激励过程中的力学模型,分析驱动器的驱动电压与总位移之间的关系,并通过实验验证其聚焦驱动力学性能。
关键词:压电复合材料;阵列驱动器;力学性能;实验分析
0引言
作为信号驱动前端的超声相控阵驱动器是超声相控阵检测中的关键器件,其质量和性能直接影响声束指向性与成像分辨率。压电材料因其响应速度快,稳定性、频响宽等优点而广泛应用于智能材料结构驱动元件中[1-2]。传统的单一压电材料应用于超声阵列换能器中存在横观各向同性、脆性等不足,限制了灵敏度和成像精度的提高。
目前,压电复合材料已经广泛应用于工程结构的健康监测技术,是智能复合材料应用最广领域之一。美国科学家Bent等[3-5]提出了压电纤维复合材料的概念并逐步推广到各领域复合材料的驱动与传感性能测试中,但当应用于非平面结构时应变驱动无方向性(对振动信号的感应亦无方向性),且所有的应变能量密度低。为了克服这些不足,课题组采用具有压电正交异性性能的复合材料传感元件,充分利用了纵向压电常数d33高的优点,在二维、三维应力场中分解出应力波分量,近年来已逐步应用于工程结构检测[6-7]。本文将压电正交异性复合材料(OPCM)应用于超声阵列驱动器的研究中,形成的新型OPCM超声相控线阵驱动器件,具有定向发射应力波的功能,将基于可编程控制门阵列现场可编程门阵列的相控驱动装置用于超声偏转和聚焦的控制中,获得可控强度的激励信号,构造一种高精度相控驱动装置,为OPCM的进一步应用及超声相控阵检测技术的发展提供理论及技术依据。
1OPCM纵波驱动元件构造原理
1.1基本结构
压电复合材料由压电陶瓷相体平行地排列于一维连通的聚合物中进而构成了两相压电复合材料,基体材料相是由比压电陶瓷柔韧性要优越得多的环氧型导电胶组成,为了在较低的电压下获得较大的驱动能量,将驱动器中多层压电陶瓷片叠加式结构,各压电陶瓷片采用力学上串联、电学上并联的方式粘合而成。图1给出了1-1型压电复合材料的示意图,在利用横向压电效应的压电复合材料中,每个压电片的极化方向与所施加的电场方向平行,都是沿着压电复合材料的厚度方向。当极化方向为x(3)方向时,3方向的驱动变形比1方向大,可以激励特定方向的应力波。
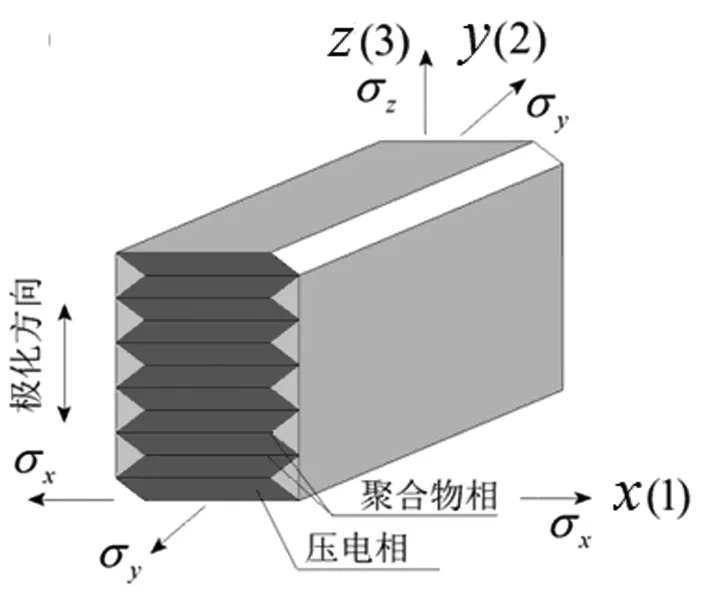
图1OPCM纵波驱动元件
1.2OPCM元件纵波驱动原理
当采用单个压电体时,输出位移有限,一般压电材料的压电应变常数d33很小,大约为(300~700)×10-12m/V。假设压电片沿厚度变形均匀,当仅在压电片的极化方向施加电压V、外力F时,其变形量δ3为
(1)
由n个几何、物理参数相同的压电片组成的驱动器,在理想情况和相同电压驱动下,各压电片之间不存在能量损耗,产生的变形量δi和相位都是相同的,因此,OPCM纵波驱动元件产生的总位移输出可认为是各压电片输出电压产生位移的线性叠加,即
(2)〗式中,Ka=ki/n,d0=nd33分别为OPCM元件的等效静态刚度和等效压电系数;ki为压电片的刚度。式(2)是OPCM纵波驱动元件设计的基本原理。可见,选用的压电片厚度越薄,叠加厚度越大及压电片面积越大,有利于减小驱动电压,提高OPCM元件位移输出量和改善力学特性,通过叠加,在同样的电压条件下,驱动效率将大大提高,但同时驱动元件的谐振频率将大幅减小。对于沿厚度伸缩振动的薄长形压电陶瓷片,同厚度情况下,长度方向激励信号能量总和要大于宽度方向激励信号总和。
2OPCM阵列驱动器驱动力学性能数值仿真
2.1模型参数设置
通过对多阵元驱动器的不同的阵元输入延时来激发,波束的聚焦和偏转可通过延时来实现。通过COMSOLMultiphysics仿真平台,采用有限元数值方法模拟了单一OPCM阵元与PZT阵元在铝块材料中声场变化以及OPCM超声相控线阵驱动器与常规PZT超声相控线性驱动器在同一时刻铝块材料中总位移的变化。
在有限元分析中,电极层厚度仅为0.1mm,与宿主构件相比,电极层厚度可以忽略不计,其电压荷载直接加在OPCM元件及PZT元件的正负极上,与实验制备尺寸一致,设定单一OPCM阵元与PZT阵元截面尺寸为分别为3.1×1.5mm和0.7×1.5m,OPCM相控线阵驱动器与常规PZT相控线阵驱动器高宽尺寸分别为3.1×17.5mm和0.7×17.5mm,被测结构铝块的截面尺寸为200×50mm。为了保证求解结果的精度,有限元求解必须选择合适的时间步长和单元大小,求解计算的时间为0-0.1μs(只考虑驱动部分),给定计算误差为1×10-9,在靠近驱动器附近选择区域网格大小为0.5μm,最大网格大小为2μm,初始时间步长为1.2ns,入射波采用窄带调制正弦信号。
2.2数值仿真结果分析
对单一阵元施加一窄带调制正弦信号,通过力电耦合效应计算其在不同时刻的位移瞬态变化。图2为方向4时OPCM驱动元件和PZT驱动元件的变形总位移, 图2(a)为OPCM驱动元件在方向4时的总位移变化, 图2(b)为PZT驱动元件在同一时刻的总位移变化,图2(c)为轴线上的声场数值比较。从图中可以看出,在4处OPCM驱动元件与PZT驱动元件的总位移变化区别不大,在驱动元件中心位移处PZT驱动元件的声场总位移高达1.8nm,但在该时刻OPCM驱动元件的声波传播距离明显比单一PZT驱动元件远。随时传播时间的增大,OPCM元件的变形比PZT元件小,但传播距离较远,这是由于OPCM元件的谐振频率小于单一PZT元件。
图3为OPCM相控线阵与PZT相控线阵驱动器在0度方向8时,偏移产生的变形位移量,从图中可看出明显的相位偏转效果,形成平行的波阵面,比较轴线处的总位移量,在8时刻处,OPCM相控线阵驱动器产生的总位移是普通PZT相控线阵驱动器的4倍,传播距离也是PZT相控线阵驱动器的2倍,可见,随着超声波在铝板中传播距离的增大,OPCM相控线阵驱动器正交异性产生的能量聚焦效应愈加明显。

(a)OPCM驱动元件(b)PZT驱动元件(c) 轴线上的总位移比较
图2单一OPCM阵元与PZT阵元在0度方向的变形 (4)

(a)OPCM相控线阵驱动器(b)常规PZT相控线阵驱动器(c) 轴线上的总位移比较
图3OPCM相控线阵与PZT相控线阵驱动器在0度方向偏转 (8)
3OPCM阵列驱动器驱动力学性能实验测试
3.1实验装置
为了进一步根据数值仿真结果制备的OPCM阵列驱动器的驱动力学性能,为后续损伤检测试验作好准备,将8阵元OPCM超声阵列驱动器直接通过液压机油耦合于铝块的表面,如图4实验装置,铝块的尺寸为225mm×140mm×50mm,采用脉冲反射回波测试超声波在铝块中的纵波传播速度是5270m/s,OPCM阵元的尺寸为14mm×1.5mm×3.1mm,相邻晶片阵元中心距为2.5mm,将四通道示波器两两分别接收采集信号。
3.2实验结果分析
为进一步研究OPCM超声相控线阵驱动器在铝块中的聚焦性能,以8阵元的排列距离为横坐标,信号传播距离为纵坐标,各通道信号幅值的平方用颜色深浅表示,它能反映出信号激发时各阵元的声场分布状况,如图5所示,颜色越深,说明激发幅值越大,反之越小,从图5(a)中可以看出,由于传播距离的不一样,各阵元间存在明显的延时差,在接收a5阵元激发的信号时,在100mm处出现一较大值,这是由于第二次反射引起的,图5(b)给出了各能道延时调整理后的灰度图,经过延时处理后,其聚焦特性有了非常明显的改善,各阵元幅值最大处在50mm处,且处于同一直线上,从图中也可看出在第4通道时有信号幅值较大,这是由于阵元a4离聚焦点最近,幅值衰减最小引起的,即经过相位偏差矫正后,在聚焦点50mm进行同相位叠加,此时即形成相控聚焦效果。

图4相控发射接收装置
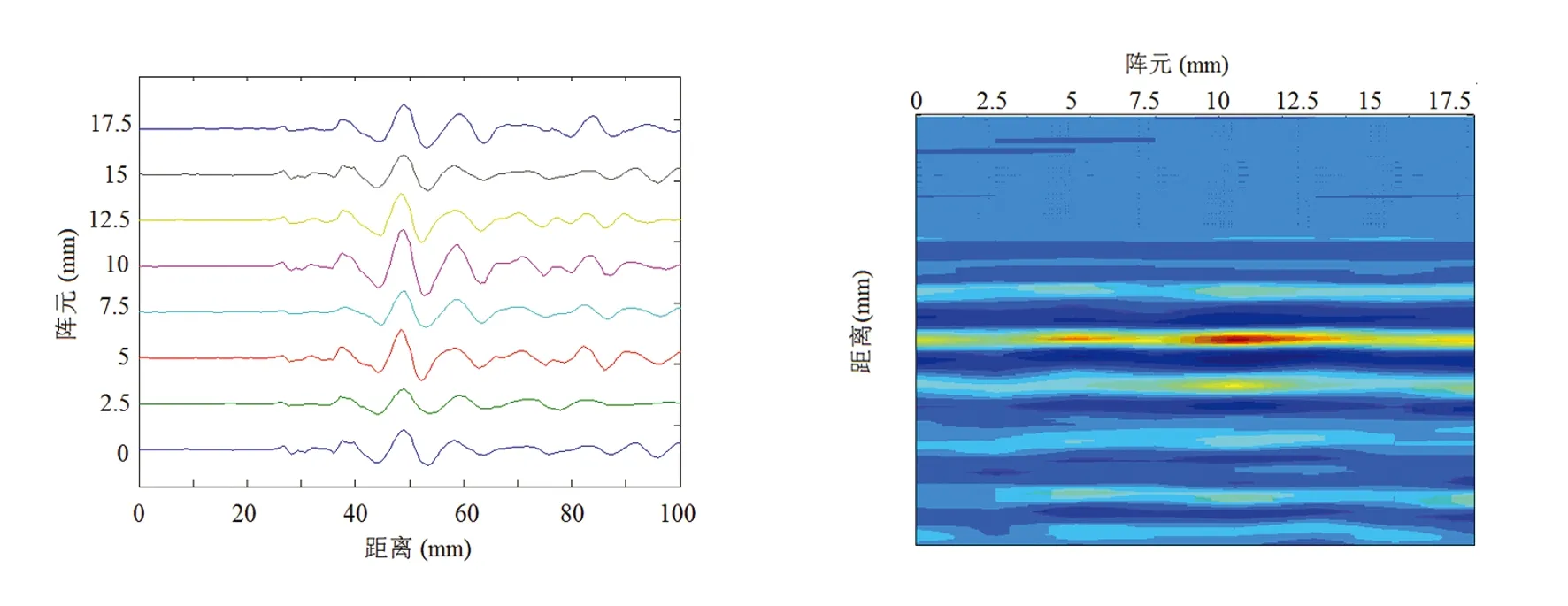
(a) 在聚焦点延时处理后信号(b)各通道延时调整后灰度图
图5超声相控激励信号灰度图
4总结
通过有限元方法建立8阵元OPCM超声相控线阵驱动器和常规PZT超声相控线阵驱动器模型,分析了两者在不同时刻不同偏移和聚焦方向的总位移变化,随着传播距离的增大,OPCM驱动阵元与PZT驱动阵元的总位移变化不明显,但对于8阵元的OPCM超声相控线阵驱动器,其偏转和聚焦时的引起的总位移和传播距离均优于常规PZT超声相控线阵驱动器。通过实验平台对新型OPCM超声相控线阵活塞型驱动器的声束相控发射聚焦声场性能进行了验证,实验结果表示采用OPCM超声阵列驱动器能实现精确相控聚焦效果。
参考文献:
[1]Sun,X.PZTSensorsandtheirApplicationinStructuralHealthMonitoring[J].AppliedMechanicsandMaterials,2012,128:669-675.
[2]Castille,C.,Dufour,I.,Maglione,M.,etal.Sensorapplicationusinglongitudinalmodeofscreen-printedPZTcantilever[J].ProcediaChemistry,2009,1(01): 971-974.
[3]Bent,A.A.,Hagood,N.W.,Rodgers,J.P.Anisotropicactuationwithpiezoelectricfibercomposites[J].JournalofIntelligentMaterialSystemsandStructures,1995, 6(03): 338-349.
[4]Bent,A.A.,Hagood,N.W.Piezoelectricfibercompositeswithinterdigitatedelectrodes[J].JournalofIntelligentMaterialSystemsandStructures,1997,8(11): 903-919.
[5]Tan,P.,Tong,L.Micro-electromechanicsmodelsforpiezoelectric-fiber-reinforcedcompositematerials[J].Compositesscienceandtechnology,2001,61(05): 759-769.
[6]Ying,L.,Baoqi,T.TheOPCMstraingaugesforstrainandstressmeasurementoforthotropicmaterialstructures[J].Actamechanicasolidasinica,2000,13(04): 337-345.
[7]ZipingWang,YingLuo.DesignandValidationofanOPCMPhasedArraySensorUsedtoNondestructiveDetection[J].Sensorletters,2015,13(10):852-856.
(责任编辑:孙文彬)
MechanicalPerformanceAnalysisofOPCMArrayActuator
WANGZi-ping,ZHANGXiao-fan,QUYi-lin,YULe,YANGDong,LIChen
(FacultyofCivilEngineeringandMechanics,JiangsuUniversity,ZhenjiangJiangsu212013,China)
Abstract:Ultrasonic phased array actuator used for electronic-to-sound transformation is a key part of ultrasonic phased array system. To solve some problems in complex structural damage testing and modern phased array actuator, the orthotropic piezoelectric composite material (OPCM) was applied in the array actuator to realize the directional actuating function. The mechanical model of the single OPCM element and OPCM array transducer was developed. The relation between the actuating voltage and total displacement was analyzed. The focusing actuating mechanics performance was validated by experiments.
Key words:piezoelectric composite material; array actuator; mechanics performance; experimental analysis
收稿日期:2015-10-20
基金项目:国家自然科学基金项目(11402101);江苏省博士后基金(1501109B);江苏大学高级专业人才科研启动基金(14JDG022)
作者简介:王自平(1979-),男,湖南湘乡人,副教授,博士,主要从事新型材料结构无损检测新技术研究。
文献标识码:中国分类号: TN712+.5, V229+.7 A
文章编号:1009-7961(2016)03-0074-05
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10 09:15:46
云南化工(2021年11期)2022-01-12 06:06:14
山东冶金(2019年3期)2019-07-10 00:54:00
中西医结合心血管病电子杂志(2016年24期)2017-03-03 21:50:53
南水北调与水利科技(2017年1期)2017-02-27 00:02:04
科学家(2016年3期)2016-12-30 00:00:52
课程教育研究·学法教法研究(2016年3期)2016-04-19 15:36:55
北方文学·中旬(2016年1期)2016-03-17 08:46:38
中国塑料(2015年12期)2015-10-16 00:57:14
哈尔滨理工大学学报(2015年2期)2015-07-22 18:23:26