基于公路双平行线组的相机外参数在线标定
2016-07-23 03:46孙英慧
电子科技 2016年7期
孙英慧
(上海理工大学 机械工程学院,上海 200093)
基于公路双平行线组的相机外参数在线标定
孙英慧
(上海理工大学 机械工程学院,上海 200093)
摘要针对车载相机在线标定问题,尤其是外参数标定方面,文中提出了一种基于车道线的在线标定方法,首先通过分析相机外参数与消失点、拍摄倾角之间的关系,将外参数的计算方法进行化简,并在已知相机高度的条件下,通过寻找场景中两组相互垂直的平行线,获取相关信息进行参数标定。实验结果表明,文中所提出方法简便可行,且具有一定的实用价值。
关键词车载相机;车道线;双平行线在线标定;外参数
近年来,智能辅助驾驶系统越来越多的被应用在改善交通信息安全方面[1],通过车载相机捕捉到的二维图像信息获得三维真实世界中的信息成为汽车驾驶安全辅助系统实现的基础[2],而集成成像[3]、计算机视觉等作为智能驾驶的核心已被众多学者关注。相机参数标定是计算机视觉系统中的关键技术之一,广义上可分为传统标定方法和自标定方法[4]。其中,采用传统标定方法进行标定时,需要使用一个特定的参照物,利用标准参照物上的点与其图像点的约束来确定相机模型的参数[5],而搭载车载相机的汽车在行驶过程中,相机的外部参数可能会由于转弯偏离、刹车过度、道路颠簸、车体碰撞等原因发生变化,这时则需重新标定。相机自标定概念是由O.D.Faugeras[6]等首次提出并使用,其无需特定参照物,通过控制相机运动获得相应的图像序列,然后利用图像匹配点的几何约束求得相机的内外参数,但是存在求解精度低、鲁棒性差的问题[7]。本文提出一种基于双平行线组的在线实时外参数标定方法,该方法无需标定板等特殊标定物,只需从相机拍摄的图像中选取相应的信息便可计算出相机外参数,通过实验证明,该方法简便可行,有较强的实用价值。
1基本坐标系的建立
本文提出的基于公路车道线的相机外参数在线标定算法中使用到4个坐标系[8],图像坐标系o-uv、成像平面坐标系、世界坐标系O-XYZ和相机坐标系C-XcYcZc。其中图像坐标系和成像平面坐标系分别是以像素和数值为单位的坐标系,图像坐标(u,v)表示像素在数组中的列数和行数,成像平面坐标系(x,y)表示像素在图像中的物理位置,两坐标系的关系为
(1)
世界坐标系是客观三维世界的绝对坐标系[9],用来描述空间中物体的绝对位置,在文中用来描述相机的基准位置;相机坐标系建立在相机上,是指以相机光心为原点,以相机的光轴为Ze轴建立的坐标系。若空间某一点在相机坐标系的坐标为(xc、yc、zc),在世界坐标系下的坐标为(xw、yw、zw),则二者关系为
(2)
其中,R为旋转矩阵;t为平移矩阵;R和t即为相机所要标定的外参数,其描述了相机在世界坐标系中的位置和方向。
当汽车以速度v平稳行驶时,如图1所示,分别建立相机坐标系和世界坐标系,其中AC为车载相机的光轴所在的直线;α为相机头部所在直线与水平方向的夹角;h为相机离地面的高度;L1、L2表示地面上两条平行的车道线;T1、T2为垂直地面车道线的一组平行标识线。在本文方法中,将建立一个转换坐标系来实现从世界坐标系到相机坐标系的转化。

图1 相机坐标系和世界坐标系
在图像坐标系中,如图2所示,矩形区域表示图像传感器的感应区,Vhp代表图像中一组车道线L1、L2的交点。同理,Vvp代表两条标识线T1、T2的交点,且标识线垂直于车道线。

图2 图像坐标系和消失点
2双平行线组在线标定外参数求解方法
2.1影响外参数的物理量
在双平行线在线标定方法中,要求场景中有两对平行标定线,一对为相互平行的车道线,方向为水平方向;另一对为垂直于车道线的相互平行的标识线,方向为竖直方向。求解时规定相机除焦距外的内参数均已知且固定不变,则外参数中需要确定的物理量有旋转量α、β、γ和平移量tx、ty、tz等6个物理量,由图1可知,相机坐标系和世界坐标系的坐标原点都落在摄像头的光轴线上,因此忽略相机的一个旋转量和两个平移量,即γ=0,ty=tz=0,在剩下的3个物理量(tx、α和β)中,将通过一个实验探究他们对消失点坐标和车道线夹角的影响,如图3所示。

图3 显示初始值的数据窗口
如图所示,使用一组与真实数据相关的显示数据,并规定其之间的数量关系如下
alpha=(α=1 800)/10.0
beta=(β-1 800)/10.0
tx=tx-1 500
实验时,分别改变tx、α和β的值,得出车道线、消失点坐标和车道线夹角等与真实车道线对比图像,结果如表1所示。
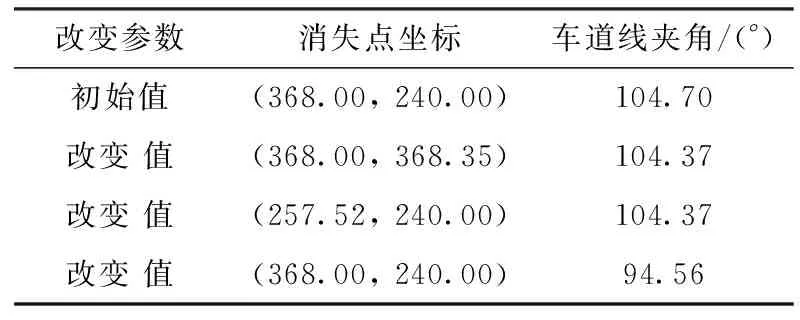
表1 各参数改变后对比图
由表1可知,当分别改变α、β时,都会对消失点坐标产生影响,而对车道线夹角没有影响,当改变tx时,对消失点坐标没有任何影响,只对车道线夹角有影响,因此在相机外参数中,可排除对其没有影响的值或将其设为0,只考虑对外参数有影响的值而无需考虑对消失点坐标和车道线夹角影响不大的量,这在一定程度上减少了参数,简化了计算。
2.2相机坐标系和世界坐标系转化关系



(3)
其中,φ=2π-α,故相机坐标系可表示为
(4)
(5)
(6)
2.3消失点坐标的计算
由透视投影规律可知,三维空间中的任一组平行线可在二维空间中相交于无穷远处的一点,例如场景中两条平行线,经过透视投影,被投影成汇聚的两条线,其在图像上将相交于一点,这个交点就称为消失点。

(7)
(8)

(9)
(10)
2.4相机外参数的计算
由图1可知,摄像头以水平面向下的方式安装在汽车前挡风玻璃上,当车正常行驶时,此时相机与水平面的夹角为α(0°≤α<90°),高度为h,由式(8)和式(9)可得
(11)
又由式(5)、式(8)和式(9)可得
(12)
由式(12)可得
(13)
又由式(10)、式(11)和式(13)可得
(14)
由式(6)、式(10)、式(11)和式(14)可得
(15)
由表4可知,在一定误差范围内,利用本文标定方法得到的相机外参数值均较接近张正友标定方法离线标定值。因此,本文提出的基于公路双平行线组对相机外参数的在线标定方法在一定误差范围内是可行的,相比离线标定方法,本文方法不需要随时携带棋盘格标定板,简便易行,不需要耗费过多的人力和物力,工作效率高。
3结束语
本文提出了一种新的车载相机外参数在线标定方法。明确了各坐标系之间的关系,根据摄相机外参数与消失点、拍摄倾角之间的关系,将计算过程进行简化,然后依据针孔成像模型和消失点的特征推导出求解相机各外参数的模型,并利用模拟场景和真实场景对方法的正确性进行验证,通过与张正友离线标定结果作比较,本文方法操作简便,实用性强,只需在图像中提取相应的信息组合即可进行计算。然而,为适应摄像头发生畸变,如何进一步提高方法的精确性和适应性将是下一步研究的重点。
参考文献
[1]曾峰林,陈家琪.基于模糊滑模控制的车辆稳定性研究[J].电子科技,2015,28(7):165-168.
[2]WangGH,HuZY,WuFC.Cameracalibrationand3dreconstructionfromasingleviewbasedonsceneconstraints[J].ImageandVisionComputingJournal,2005,23(3):311-323.
[3]刘轶群,张建奇,王晓蕊,等.基于集成成像的三维空间数字水印新技术[J].电子科技,2015, 28(5):1-4.
[4]刘振中,傅莉.摄像机标定研究[J].沈阳航空航天大学学报,2010,27(1):43-47.
[5]陈天飞,马孜,李鹏,等.一种基于非量测畸变校正的摄像机标定方法[J].机械与检测,2012,27(2):243-246,251.
[6]FaugerasOD,MaybankS.Motionfrompointmatches:multiplicityofsolutions[C].HongKong:ProceedingsofWorkshoponVisualMotion,1990.
[7]姚静.相机标定相关问题研究[D].南京:南京理工大学,2012.
[8]张广军.机器视觉[M].北京:科学出版社,2005.
[9]王飞.段建民,高德芝,等.一种雷达和摄像机的空间标定方法[J].计算机测量与控制,2012,20(2):454-463.
[10]ZhangZhengyou.Aflexiblenewtechniqueforcameracalibration[J].IEEETransactionsonPAMI,2000,22(11):1330-1334.
A Calibration Method for External Camera Parameters Based on Two Parallel Lines of Highway
SUNYinghui
(SchoolofMechanicalEngineering,UniversityofShanghaiforScienceandTechnology,Shanghai200093,China)
AbstractA new method based on lane line for self calibration of vehicle camera, especially the external parameter calibration, is proposed. By using the relationship between the external parameters of the camera and the vanishing point and the shooting angle, the calculation method of the external parameters is simplified. With the height of the camera given, the parameters can be calibrated by looking for two of the parallel line information. Experiments show that the proposed algorithm is feasible and of practical value.
Keywordsvehicle camera; lane line; double parallel lines calibration; external parameter
收稿日期:2015- 11- 20
作者简介:孙英慧(1990-),男,硕士研究生。研究方向:图像处理等。
doi:10.16180/j.cnki.issn1007-7820.2016.07.012
中图分类号TP391.41
文献标识码A
文章编号1007-7820(2016)07-040-04