
地面植被的主被动同步观测实验方法
2016-07-21 01:23:14许文波李世华
实验科学与技术 2016年2期
罗 欣,许文波,李世华
(电子科技大学 资源与环境学院,成都 611731)
地面植被的主被动同步观测实验方法
罗欣,许文波,李世华
(电子科技大学资源与环境学院,成都611731)
摘要针对植被冠层结构参数主被动遥感协同反演的问题,开展了不同地形、不同植被覆盖类型的地面观测实验,获取了典型植被不同方位、不同角度的地面激光雷达和成像光谱数据,同时,测量了多种冠层结构参数,构成了与飞行数据配套的地面同步观测数据集。该文介绍了实验中样地选择,观测站点设置,主被动数据获取,辅助数据测量等过程的具体目标和设计;总结了实验中获得的主要经验,对遥感类专业的实践教学及科研实验均具有指导意义。
关键词激光雷达; 成像光谱仪; 地面观测; 植被结构; 植被光谱
植被影响着能量平衡、气候、水文和生物地球化学循环,是气候和人文因素对环境影响的敏感指标[1]。植被冠层结构参数的提取不仅能够用于研究植被生态系统结构和功能,还能够为植被冠层能量交换的描述提供结构化定量信息。因此,提取植被冠层结构参数对于生态系统的研究具有重要意义[2]。此外,通过多期静态的地面观测可以实现复杂地表植被参数高精度的反演,提高信息提取效率并降低遥感监测评估应用的成本,同时还能对研究区域植被遥感信息进行时空连续扩展,进而开展复杂地表植被参数的多模式遥感信息动态分析与建模理论研究及验证。
目前,利用单一的被动光学遥感数据提取植被冠层结构参数的各种方法,均存在一定的局限性[3]。尽管高光谱遥感能提供精细的地物目标光谱信息,在植被种类识别和生化组分反演方面有着一定的优势[4-6],但在植被结构参数的估测方面仍存在一些问题。主动光学遥感提取植被结构参数是近年来出现的方法,如利用LiDAR测量植被的几何结构,可以获得植被精确的形态、高度及一定精度的冠层信息[7-8]。因此,主被动方法相结合的植被结构参数协同反演技术,将是一种提高遥感反演精度的有效途径[9]。
1地面同步观测实验的目标
在飞行遥感实验进行期间,激光雷达和成像光谱仪地面同步观测就是在飞行实验区域内确定多个不同的野外数据采集样地,架设地面激光雷达和成像光谱仪,利用多角度观测设备获取不同角度、不同位置的三维激光点云数据和成像光谱数据,为植被结构参数反演提供地面数据支持,具体目标有:1)探索利用地面设备获取地面植被结构参数(单株及冠层)的新方法,为遥感反演提供高质量的验证数据;2)获取更细致的植被三维结构,结合卫星影像和机载数据及地面测量的辅助数据,实现不同类型植被场景真实结构的模拟[10-11];3)针对不同地形,验证适用于复杂地表的参数化模型及遥感反演方法。
2地面实测数据获取方案
根据卫星过境时间以及飞行时间确定地面实验时间,进行同步实验。为了反映植被参数在水平空间上的连续变化特征,在重点实验区内靠近中部区域设置一条核心样带区。样带的布设考虑了地面调查的可及性,地形及植被类型的代表性等因素。样地获取数据将为三维场景模拟获取输入参数,并为遥感反演获取可靠的真值。因此,样地的选择应满足:
1)每个样区需要达到一定的面积,通常以遥感卫星影像空间分辨率为参考;
2)选择不同大小且植被类型多样的多个样区进行观测,覆盖不同生长状况的植被;
3)可以获取不同地形上的植被信息,以便研究地形对植被结构参数反演的影响;
4)可以对不同分布密度的植被进行观测,获取不同稀密状态下的观测数据。
2.1实验样地与仪器设备
实验样地均位于飞行区域内,覆盖了飞行实验区的主要地表类型、山区的阴阳坡面(不含阴影区域),并具有配套星载图像。实际观测目标包括森林、农田等。
1)农田区域。样地选择多种单一作物类型成片分布的农田,农田面积一般达到50 m×50 m以上。
2)森林区域。选择多处单一植被类型成片分布的森林样地,森林基本为纯林如针叶林、阔叶林等,长势良好,无砍伐现象,尽量避免了多种植被类型混合。每个样地的面积一般达到15 m×15 m左右。此外,还特别选择一些植被分布稀疏的区域,以便对单木进行地面观测。
通过对整个飞行区域的实地考察,并根据地形等实际情况,考虑植被类型、长势等因素分别设计了两种样地:一种是代表不同林分类型的大样地,大小为45 m×45 m左右,利用地面激光雷达进行林分尺度的大场景激光点云数据获取,为验证植被参数多模式协同反演模型获取输入参数和验证真值;另一种是进行精细化测量的小样地,用于典型树种和林分场景的三维重建,以及利用多角度数据开展植被方向性反射特性和复杂地表对参数反演影响的研究。
实验中采用的仪器设备有:便携式激光雷达、便携式成像光谱仪、高精度RTK、全站仪、植物冠层分析仪、手持GPS、激光测高仪和卷尺等。其中,利用RTK可以测量架站点位的WGS-1984坐标值,从而进行地面数据的坐标转换,实现地面数据与机载数据的配准;卷尺用于丈量样地大小;全站仪用于测定站点的局部精确坐标值;冠层分析仪等用于测量样地内的LAI值和其他基本辅助参数。
表1给出了地面同步观测实验中使用的主要仪器。
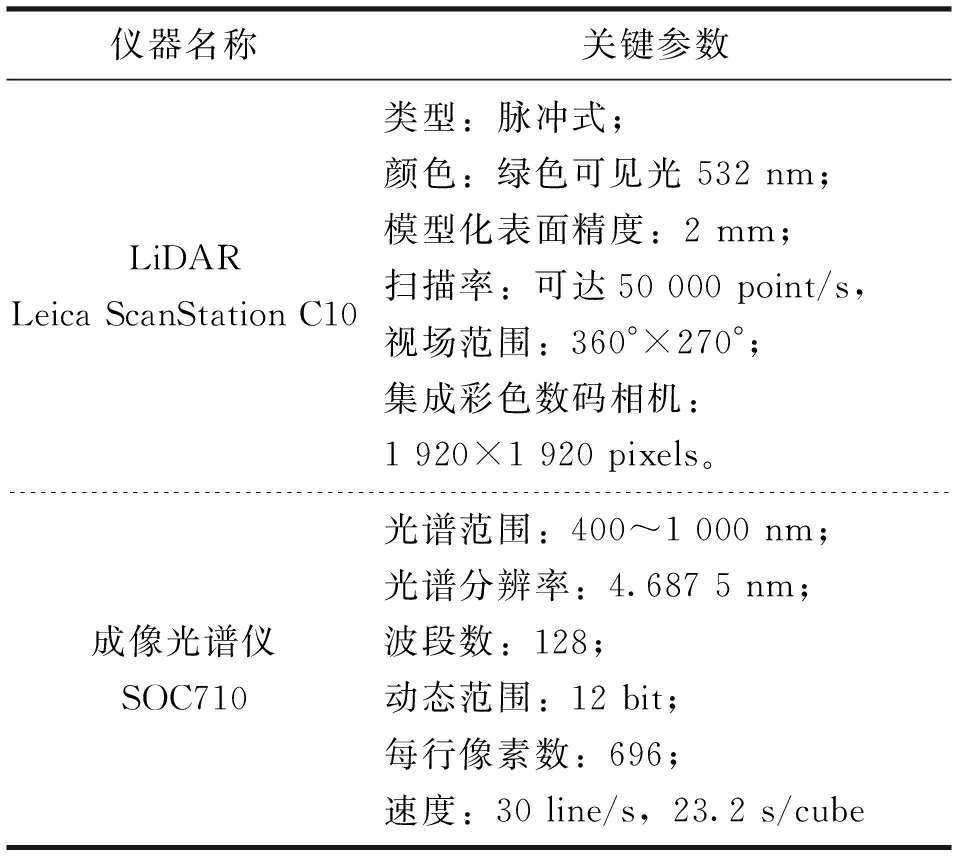
表1 地面观测实验使用的主要仪器
2.2激光雷达数据获取方法
根据样地范围和实际观察情况在样地内选择适当架站位置架设激光雷达,保证两个相邻站点能互相通视,同时为了后期能对各站点点云数据进行精确拼接,在各样地内部还另外选择了一个全站仪架设点,该站点与所有观测站点均能通视。
对于大样地选择了10个观测站点,分别命名为ScanPos01~ScanPos10,位置如图1(a)所示。利用罗盘初步定位,用卷尺进行站点的粗测量,再利用全站仪进行站点位置的精确测量,并建立独立坐标系。最后,利用地面激光雷达以“后视点已知”的方式在各站点进行顺序扫描,扫描分辨率为“高精度”,即100 m处的激光点距为0.05 m。对于样地外的站点,水平视角以两站之间的视场有较小的重叠为准,垂直视角范围为0°~270°;对于样地内的站点,水平和垂直最大视角分别为360°和270°,每个站点的扫描时间约为20 h。
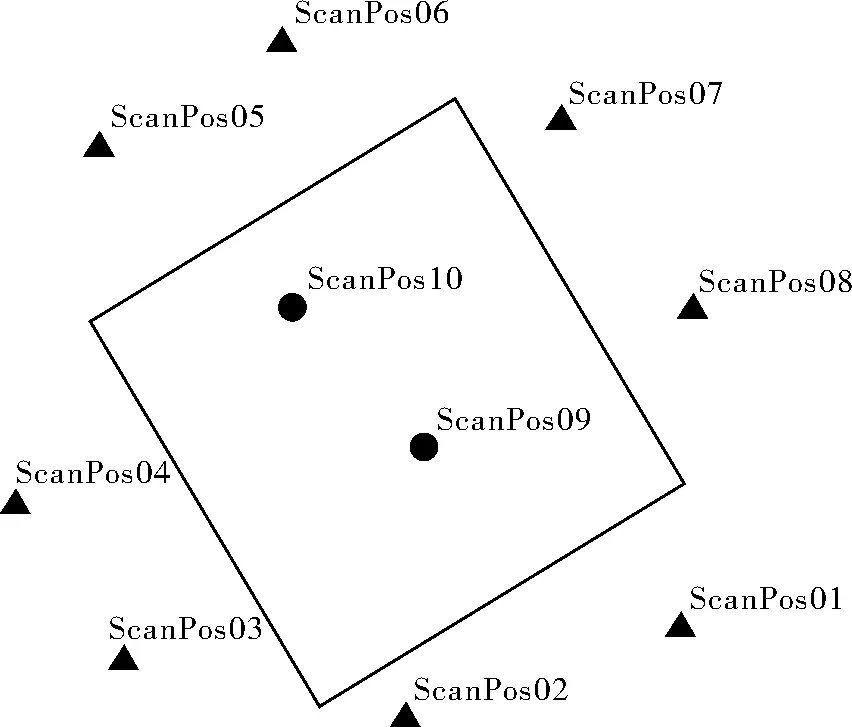
(a)大样地
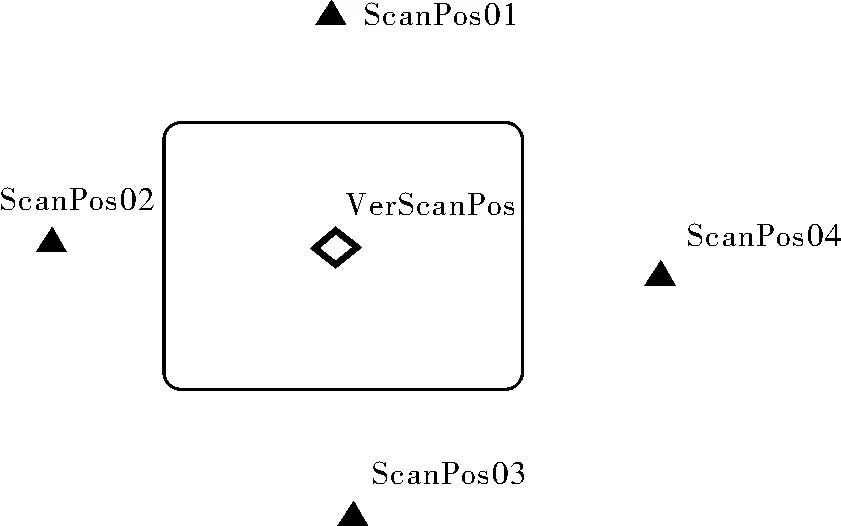
(b)小样地图1 样地扫描站点架设位置
对于每个小样地,分别从4个方向和一定距离设置4个站点进行观测,分别命名为ScanPos 01~ScanPos 04,位置如图1(b)所示。此外,各站点还设置了特征明显的标志物,便于后期不同站点数据的拼接。地面激光雷达在4个站点以“超高精度”(即100 m处的激光点距为0.02 m)模式进行扫描,水平视角范围仍以两站之间的视场有较小的重叠为准,垂直视角范围为0~270°,每个站点的扫描时间约为1 h。
每个站点扫描完成后,必须检查点云数据的质量,确定是否是对应目标样区的激光点云数据,否则就应调整水平视角范围重新进行扫描。图2为获取坡地茶树地面激光雷达数据的场景。
对于单株植被的观测,为了获取单木的三维全景点云数据,在距离植被约5 m的圆周上以120°为间隔架设了A,B,C共3个站点进行扫描,如图3所示。扫描分辨率为“高精度”,各站位的位置也使用全站仪进行精确测量。

图2 坡地茶树地面激光雷达数据的获取

图3 单木观测站点示意图
2.3成像光谱数据获取方法
成像光谱数据是在获取各样地激光雷达数据的同时,利用地面成像光谱仪采集的。扫描站点的具体架设方案与激光雷达相同,站点的精确位置仍旧通过全站仪进行坐标测量获得。对于低矮植被还选择了一个典型的垂直观测点,进行垂直观测。最后,利用成像光谱仪在每个站点从不同水平和垂直角度进行扫描成像。水平方向从左至右每次增加15°,保证样方内的所有区域都能够被扫描;垂直方向选择水平位置及固定俯仰角,以确保植被冠层全部位于其成像范围内。每次扫描前应先通过查看预览图来进行对焦和取景,保证被扫描场景的完整性和清晰度。每景成像光谱数据获取后,也必须检查数据质量,对存在光谱饱和的数据,需调整仪器曝光参数对相应场景重新进行扫描。此外,实验完毕后还应对数据进行备份。图4为获取针叶林地面成像光谱数据的场景。

图4 针叶林地面成像光谱数据的获取
2.4辅助数据获取
除激光雷达和成像光谱数据外,根据卫星过境时间以及航空飞行时间,还需通过地面快速测量获取植被结构相关辅助参数的观测值,包括叶面积指数、株高、胸径、冠幅和单木精确的地理位置等,以及各样地的实景照片。
1)叶面积指数(LAI)测量。在样地内选择具有代表性的区域,使用冠层分析仪测量植被LAI,在每个样地分散测量3~5次取平均值作为该样地的LAI,并将GPS记录的测量位置标记在图件上。
2)植被光谱测量。使用野外光谱仪测量叶片光谱。对于森林,其冠层光谱在有条件的情况下可以进行测量,在不能测量的情况下,利用采集到的叶片光谱进行模拟。
3)其他基本结构参数测量。使用测高仪测量植被高度,每个样地分散测量5次,取平均值作为该样地的植被高度,用卷尺测量植被胸径和冠幅,植被相间程度也用卷尺进行测量。
4)辅助信息测量。利用手持气象站记录气象要素等信息;使用数码相机对样地场景和植被冠层总体形态进行记录;此外,还需记录植被类型、行距、坡度、坡向、垄向、拍摄高度信息等信息。
3结束语
目前,地面观测实验获取的同步数据已在一定程度上满足了植被结构参数反演科学问题研究的需求。但是,由于实验区部分农作物植株较高,株间间距较小,而地面激光雷达的架设高度有限,导致样地内部点云数据密度分布不均匀。离仪器近的区域点云密度高,离仪器远的区域点云密度低,甚至存在数据空洞的现象,在后期处理时应考虑这种数据的不均匀性;在激光雷达扫描期间,由于实验区天气条件变化,不时存在阵风的影响。导致相邻站点间部分重叠区域的点云有错位情况,对后期多站数据拼接有一定的影响;由于某些实验区域树木密集,林下植被多样,草甸松软,在某些站点激光雷达无法与全站仪测定的站点位置严格对准,影响了不同站点间点云数据的拼接精度。另外,由于某些实验区植被覆盖茂密,光照条件相对不足,导致成像光谱数据也存在少量的模糊。同时,实验区气候因素多变,特别是在不确定的阵风和光照条件影响下,某些成像光谱数据存在一定的畸变,在后期处理时也应注意。
未来将通过架设观测塔或导轨的方式,对较高的植被冠层进行地面垂直观测;在有条件的情况下,对小范围的植被进行长期多时相观测,研究植被垂直结构参数主被动协同提取的时空扩展问题。同时,扩大观测地物的类型,实现对山地、水体、道路以及人工建筑物等覆盖的复杂区域的多方位、多角度立体观测。
参 考 文 献
[1]陈刚,张彪,王忠,等. 植物生理学实验课程体系的构建[J]. 实验科学与技术,2011,9(6):85-88.
[2] KORHONEN L,KORPELA I,HEISKANEN J,et al. Airborne discrete-return liDAR data in the estimation of vertical canopy cover,angular canopy closure and leaf area index[J]. Remote Sensing of Environment,2011,115(4): 1065-1080.
[3] 李海燕,杨永青,李新举. 测绘成果在高等农业院校的安全应用思考[J]. 实验科学与技术,2013,11(4): 178-179.
[4]OMARI K,WHITE H P,STAENZ K,et al. Retrieval of forest canopy parameters by inversion of the PROFLAIR leaf-canopy reflectance model using the LUT approach[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2008,2(4): 715-723.
[5] 郝学元. 用于环境参数测量的传感器实验平台构建[J].实验科学与技术,2012,10(6): 9-10.
[6] 刘瑜,韩震. 案例教学法在“遥感原理”实践教学中的应用[J]. 实验室研究与探索,2013,32(9):164-166.
[7] ZHAO K,POPESCU S,NELSON R,et al. LiDAR remote sensing of forest biomass: a scale invariant estimation approach using airborne lasers[J]. Remote Sensing of Environment,2009,113(1): 182-196.
[8] 邓志辉. 并行鉴相测距激光雷达[J]. 实验科学与技术,2011,9(5): 29-30.
[9] LIU Lijuan,PANG Yong,FAN Wenyi,et al. Fused airborne liDAR and hyperspectral data for tree species identification in a natural temperate forest[J]. Journal of Remote Sensing,2013,17(3): 679-695.
[10]王海燕,程水源,郭秀锐,等. 激光雷达在环评实验课中的应[J]. 实验室研究与探索,2012,31(8):101-103.
[11] TEOBALDEILI M,PUIG A D,ZENONE T,et al. Building a topological and geometrical model of poplar tree using portableon-ground scanning LIDAR[J]. Functional Plant Biology,2008,35(10): 1080-1090.
Experimental Method for Acquiring Active-Passive Synchronous Data from Vegetation on the Ground
LUO Xin,XU Wenbo,LI Shihua
(School of Resources and Environment,University of Electronic Science and Technology of China,Chengdu 611731,China)
AbstractFor researching active-passive synergic retrievals of vegetation canopy structure parameters,a ground-based observation has been carried out on different topography and different vegetation types,in which the light detection and ranging(LiDAR)and hyperspectral data of typical vegetation are collected from different locations and angles. Meanwhile,a variety of canopy structure parameters are measured. The overall results of this experiment form a synchronous observation data set on the ground,corresponding to the flight data. The specific objectives and experimental design are introduced,including sampling plot selection,observation station setting,active-passive data acquisition,and auxiliary data measurement. The main experimental experience is also summarized,which is of important guiding significance for professional research and educational practices in the field of remote sensing.
Key wordslaser radar;imaging spectrometer;ground-based observation;vegetation structure;vegetation spectrum
收稿日期:2015-04-10;修改日期: 2015-06-25
基金项目:国家973计划项目(2013CB733400);中国博士后科学基金(20100471664);中央高校基本科研业务费项目(ZYGX2013J120);电子科技大学本科教育教学研究项目(2015XJYYB088)。
作者简介:罗欣(1977-),女,博士,副教授,主要从事光学遥感与应用,图像处理与模式识别方面的研究。
中图分类号P237
文献标志码A
doi:10.3969/j.issn.1672-4550.2016.02.010
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
现代园艺(2021年23期)2021-12-01 07:47:44
汽车观察(2021年8期)2021-09-01 10:12:41
大气科学(2021年1期)2021-04-16 07:34:18
林业勘查设计(2020年1期)2021-01-18 02:40:48
新农业(2020年18期)2021-01-07 02:17:08
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
