基于权值改进D-S理论的对空目标识别融合*
2016-07-21 05:19:35董杰蔡群丁锋张博
现代防御技术 2016年2期
关键词:目标识别
董杰,蔡群,丁锋,张博
(电子工程学院,安徽 合肥 230037)
探测跟踪技术
基于权值改进D-S理论的对空目标识别融合*
董杰,蔡群,丁锋,张博
(电子工程学院,安徽 合肥230037)
摘要:针对传统证据理论证据高冲突性问题,提出了一种基于权值改进型Dempster-Shafer(D-S)理论的对空目标识别方法。在研究D-S证据理论数学模型基础上,依据泛函距离空间理论,更新计算各个传感器的信度函数可靠性权值,对各个传感器的基本概率赋值函数进行修正,最后利用D-S合成公式对各个传感器进行融合判决。仿真结果证明了该方法的有效性。
关键词:目标识别;D-S证据理论;距离空间;权值分配;冲突系数;证据源
0引言
对空目标识别是信息综合处理的重要组成部分。运用多侦察手段及多方位的信息感知途径可以获取空中目标的特征信息,通过对采集的特征信息进行信息融合处理,结合先验知识可以实现对空中目标的识别[1-3]。随着信息处理技术的发展,信息融合的方法也在不断改进,选取最优的信息融合方法提高目标识别的准确性和可信度已逐渐成为趋势。
D-S证据理论[4-6]是由Dempster和Shafer于20世纪年60年代末和70年代初建立的一套数学理论,适用于专家系统[7]、人工智能[8]、模式识别[9]和系统决策[10]等领域的实际问题。证据理论虽然在处理不确定性问题上存在较为明显的优势,但是也存在一些问题[11-12],主要体现为:①组合爆炸问题;②有限辨识框架及证据体独立性问题;③高冲突证据组合问题。这3个问题至今仍成为专家研究热点问题。
本文通过从数学理论入手,通过分析高冲突问题本质,结合泛函理论降低冲突证据的贡献性,提出了权值改进的D-S合成方法,并将算法成功地应用于对空目标识别当中。
1D-S证据理论基本原理
首先简单介绍D-S理论中关于基本概率赋值函数、信度函数、似真度函数与不确定性的基本概念。
(1) 假定P(Η)表示Θ的所有子集构成的集类(称为Θ的幂集),映射m:P(Η)→[0,1]称为一个基本概率赋值或mass函数,当满足如下条件时:

(1)
(2) 映射Bel:P(Η)→[0,1]称为信度函数(belief function),如果:
Bel(φ)=0;Bel(Η)=1;

(2)
(3) 映射Pl:P(H)→[0,1]称为似真度函数(plausibility function),如果:
Pl(φ)=0;Pl(H)=1;

(3)
式(1)~(3)表明,信度函数表示对假设的信任程度估计的下限,是一种悲观估计;而似真度函数表示对假设的信任程度估计的上限,是一种乐观估计。这2个函数服从定理:对任意A∈P(Η),有

(4)
证据理论利用信度函数和似真度函数来描述问题的不确定性。证据理论的不确定区间可以用图1表示。

图1 不确定区间示意图Fig.1 Uncertainty interval diagram
设识别框架Θ存在多个证据E1,E2,…,En,其对应的基本概率赋值函数分别为m1,m2,…,mn,焦元为Ai,则将不同的基本概率赋值函数融合在一起的D-S合成规则为
(5)
D-S证据理论在表示和处理不确定性问题时具有明显的的优势,但是在处理不确定性问题时仍存在一些问题,其中,高冲突证据[13]组合问题成了当前专家们争相研究的热点之一。
2改进型权值D-S证据理论对空目标识别算法
近几年专家研究解决D-S证据理论高冲突问题的思路一般分为2种:①直接法,即直接对D-S合成规则进行修改[14];②间接法,即先对数据进行修正之后,依据修改的数据再次进行合成,传统合成规则基本保持不变[15]。考虑到D-S证据理论的经典性和先进性不容舍弃,本文结合实际军事需求,根据所得数据研究得到更新权值,通过权值再分配修改基本概率赋值函数模型,再经过D-S合成规则在多传感器情况下对空中目标进行识别判决。
2.1多传感器对空目标识别流程
多传感器数据融合相较于单一传感器信息具有容错性、互补性、实时性以及经济性等优点,在对空防御系统方面得到广泛的应用。数据融合的准确性和时效性将直接关系到指挥人员对战场态势与威胁的估计。结合本文所提算法,对空目标识别流程思路如图2所示。
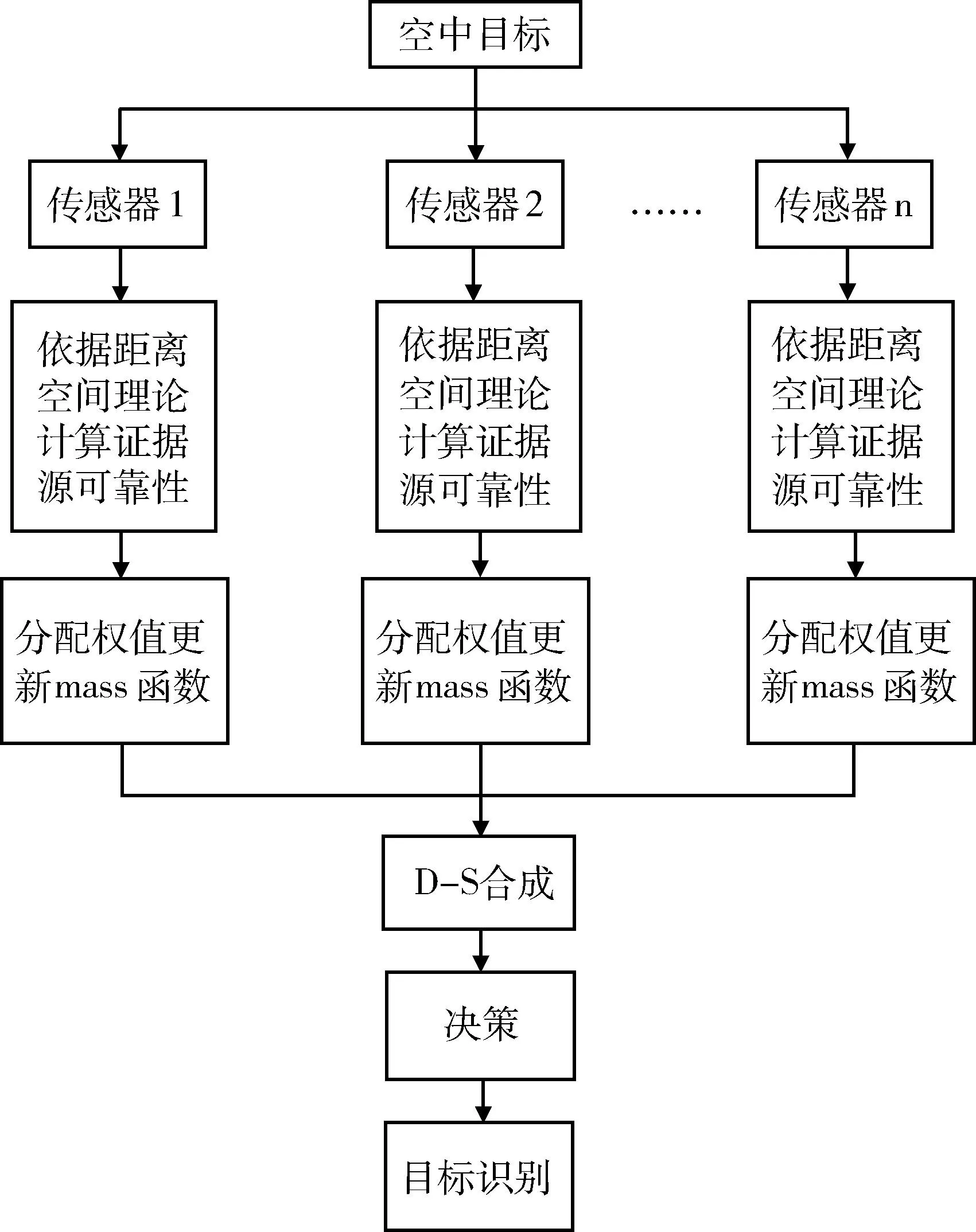
图2 多传感器空中目标识别通用流程图Fig.2 Multi-sensor aerial target identifying common flow chart
如图2所示,基于改进型D-S合成算法的多传感器数据融合流程可以总结为以下4步:
Step 1:多个传感器跟踪空中目标航迹,获得目标运动轨迹、位置等信息,得到数据融合先验信息。对处于不同方位的多个传感器数据进行空间、时间坐标校准,统一各类数据的空间、时间参考点,保证融合时的数据对等性。
Step 2:依据先验知识库以及实际战场态势环境对空中目标进行分类。例如,可以将空中目标粗略分为:巡航导弹、运输机、直升机、作战飞机和民航机5类。以所分类机型作为依据,对侦察关注目标进行分类判决。
Step 3:建立基于目标类型的距离、速度、加速度和方位变化率等参数的隶属度函数,使用模糊C均值聚类方法或者BP神经网络算法获得各个传感器对各类机型的基本概率赋值mass函数;根据本文所提方法计算更新信任分配权值ω,对各个传感器的正确识别概率进行再分配,得到修正后的mass函数和信任区间。
Step 4:依据修正mass函数进行D-S合成,根据判决门限进行决策。决策信息会反馈给各大传感器平台,各平台依据目标的威胁等级来控制对目标的跟踪状态。
2.2改进权值分配数学依据

依据泛函距离空间理论,距离的远近代表两者之间的相似程度。正确识别概率矩阵P到准理想正确识别概率向量S的距离可以表示证据源的可靠程度:距离越远,说明可靠性越弱;距离越近,说明可靠性越强。
由此通过计算P到S的距离来设定合理的权值,让可靠性弱的证据源在信度函数中权值低、贡献少,可靠性强的证据源在信度函数中权值高、贡献多。
首先计算正确识别概率矩阵的距离。将证据源矩阵定义在欧氏空间Kn上,
Kn={(x1,x2,…,xn):x1,x2,…,xn∈K}。根据定义的欧式距离,满足定义条件的距离可以为以下2种:

(6)

(7)

权值计算由传感器的正确识别概率矩阵P到准理想正确识别概率向量S的距离决定:
(8)

得到权值之后对mass函数进行更新,可得
(9)
通过分析以上数学模型可以看出,经过权值重新分配的弱证据源的mass函数作用降低,而强证据源的mass函数作用会增强。
3仿真实验
本文仿真以对空目标识别为背景,主要分析改进型权值D-S证据理论对巡航导弹、运输机、直升机、作战飞机和民航机五大通用机型的识别效果。
3.1实验1:本文算法与传统D-S证据理论冲突性比较
首先建立识别框架Θ={巡航导弹,运输机,直升机,作战飞机,民航机},共有3个传感器A,B,C对目标进行识别。设通过BP神经网络自主学习获得10组多传感器组的先验正确识别概率,正确概率值随机分布在0.6~0.9数值之间。另已知该十组多传感器组的对识别框架的基本概率赋值相同,数据如表1所示。
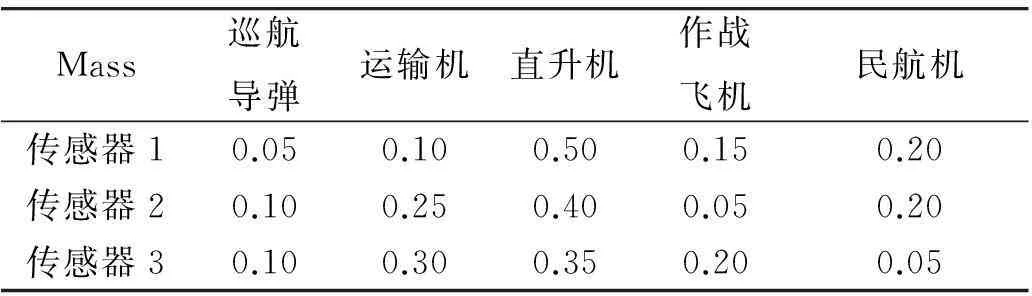
表1 目标基本概率赋值表
利用式(6)~(9)计算得到本文算法与传统D-S算法的冲突系数比较,仿真结果如图3所示。
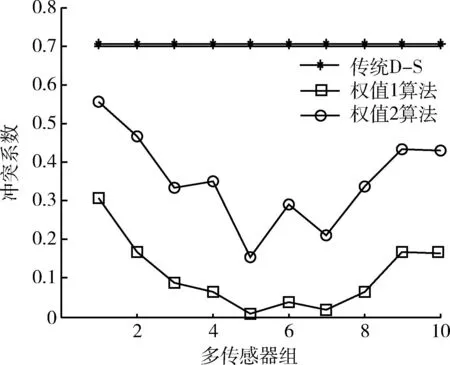
图3 本文算法与传统D-S理论冲突系数比较Fig.3 Conflict coefficient comparison of the proposed algorithm and traditional algorithm
图3仿真结果显示由于传统D-S证据理论的冲突系数与正确识别概率无关,冲突系数仅由目标基本概率决定,冲突系数较高;而本文算法通过分析传感器正确识别概率更新修正权值,让正确率低的传感器证据贡献小,正确率高的传感器贡献大,经过
权值修正后,冲突系数明显降低。
3.2实验2:权值改进型D-S合成算法应用对空目标识别流程仿真
识别框架与实验一识别框架一致,设各传感器正确识别概率如表2所示。

表2 各种传感器的正确识别概率表
由表2能够得到正确识别概率矩阵Q和准理想正确识别概率向量S分别为
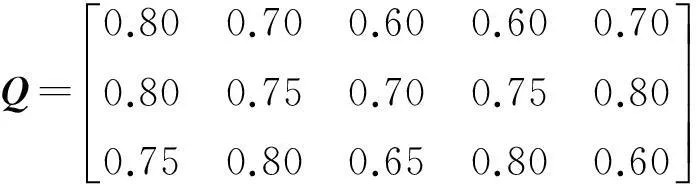

(10)
w1=0.924 7, w2=1, w3=0.907 3,
(11)
式(11)中w2=1说明经过距离换算后传感器2提供的基本概率赋值可靠性最强,在合成规则中发挥的作用也会最大。
已知对于某一空中目标的3个传感器的基本概率赋值函数如表2所示。
将计算得到的分配权值对最初3个传感器的mass函数进行调整,得到修正后的mass函数值,如表3所示。

表3 修正基本概率赋值表
而后根据Dempster组合规则对各个传感器的mass函数进行融合,得到融合后目标对于巡航导弹、运输机、直升机、作战飞机和民航机这5类的隶属情况如图4所示。

图4 合成可信度函数值比较Fig.4 Comparison of synthesis reliability function
从图4的结果可以看出,本文所提算法的可信度数值稍低于传统D-S合成所得可信度,但是判别阈值仍可以设为0.5以上,判别结果明显为某型直升机。本文通过虽然牺牲了一定的可信度值,但冲突系数明显降低,且不影响判别结果,仍说明了本文所提算法的优越性。
4结束语
本文通过分析对空目标识别应用特性,提出了权值改进型D-S证据理论合成算法在多传感器目标识别的应用流程。利用泛函距离空间理论,根据正确识别概率矩阵分析出各个传感器的可靠性,并以此为依据计算出各传感器的权值,减小了不可靠证据源的消极影响,降低了高冲突性,提高了判决的可信度。最后通过数据仿真分析证明了该算法的有效性以及采用多传感器进行空中目标识别的优越性。
参考文献:
[1]韩崇昭,朱洪艳,段战胜.多源信息融合[M].2版.北京:清华大学出版社,2010: 86-87.
HAN Chong-zhao,ZHU Hong yan, DUAN Zhan-sheng. Multi-Source Informatinfusion[M]. 2nd ed. Beijing:Tsinghua University Press,2010: 86-87.
[2]王润生.信息融合[M].北京:科学出版社,2007: 74-80.
WANG Run-sheng. Information Fusion[M]. Beijing: Science Press,2007: 74-80.
[3]何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010:57-68.
HE You, WANG Guo-hong, GUAN Xin. Information Fusion Theory with Applications[M]. Beijing: Publishing House of Electronics Industry, 2010: 57-68.
[4]DEMPSTER A R. Upper and Lower Probabilities Induced by a Multiple Valued Mapping[J]. The Annals of Mathematical Statistics, 1967, 38(2): 325-339.
[5]SHAFER G.A Mathematical Theory of Evidence[M]. Princeton: Princeton University Press, 1976.
[6]BARNETT J A. Computational Methods for a Mathematical Theory of Evidence[C]∥Proc of the 7th Int Joint Confon Artificial Intelligence. Vancouver: William Kaufmann, 1981: 868-875.
[7]SEVASTIANOV P, DYMOVA L, BARTOSIEWICZ R A.Framework for Rule-Base Evidential Reasoning in the Interval Setting Applied to Diagnosing Type 2 Diabetes[J]. Expert Systems with Applications, 2012, 39(4): 4190-4200.
[8]SMETS P,KENNES R.The Transferable Belief Model[J].Artificial Intelligence, 1994, 66(2): 191-234.
[9]AMINRAVAN F,SADIQ R,HOORFAR M,et al.Evidential Reasoning Using Extended Fuzzy Dempster-Shafer Theory for Handling Various Facets of Information Deficiency[J]. Int. of Intelligent Systems, 2011, 26(8): 731-758.
[10]段新生.证据理论与决策、人工智能[M].北京:中国人民大学出版社,1990: 13-35.
DUAN Xin-sheng.Evidence Theory and decision,Artificial Intelligence[M]. Beijing: Renmin University Press, 1990: 13-35.
[11]戴冠中,潘泉,张山鹰,等.证据推理的进展及存在问题[J].控制理论与应用,1999, 16(4): 465-469.
DAI Guan-zhong, PAN Quan, ZHANG Shan-ying, et al. The Developments and Problems in Evidence Reasoning[J]. Control Theory & Applications, 1999, 16(4): 465-469.
[12]侯俊.证据推理组合方法的分类、评价准则及应用研究[D].西安:西北工业大学,2006.
HOU Jun.The Combination Rulse Performance Index and Applications of Evidence Reasoning[D].Xi′an:Northwestern Polytechical University,2006.
[13]杨风暴,王肖霞.D-S证据理论的冲突证据合成方法[M].北京:国防工业出版社,2010: 95-155.
YANG Feng-bao, WANG Xiao-xia. Combination Method of Conflictive Evidences in D-S Evidence Theory[M]. Beijing:National Defence Industry Press, 2010: 95-155.
[14]姚爽,郭亚军,黄玮强.基于证据距离的改进DS/AHP多属性群决策方法[J].控制与决策,2010, 25(6): 894-898.
YAO Shuang, GUO YA-jun, HUANG Wei-qiang. An Improved Method of Aggregation in DS/AHP for Multi-Criteria Group Decision-making Based on Distance Measure[J].Control and Decision, 2010, 25(6): 894-898.
[15]韩德强,邓勇,韩崇昭,等.基于证据方差的加权证据组合[J].电子学报,2011, 39(3A): 153-157.
HAN De-qiang, DENG Yong,HAN Chong-zhao,et al. Weighted Combination of Conflicting Evidence Based on Evidence Variance[J]. Acta Flectronica Sinica, 2011, 39(3A): 153-157.
Identifying Aerial Target Fusion Based on the Improved Weighting D-S Theory
DONG Jie,CAI Qun,DING Feng,ZHANG Bo
(Electronic Engineering Institute,Anhui Hefei 230037,China)
Abstract:A multiple sensor identifying aerial target method based on weighting D-S theory is proposed for solving highly conflict D-S theory. By researching D-S theory mathematical model, the sensor reliability of correct identifying probability is analyzed based on functional metric space theory. The basic probability assignment (BPA) is revised by renewal weight coefficient which depends on the sensor reliability. Fusion decision of individual sensor is made by D-S combination rules. The example results verify the validity of the method.
Key words:target identifying; D-S theory; metric space; weighting distribution; friction coefficient; evidence source
*收稿日期:2015-07-03;修回日期:2015-10-15
基金项目:安徽省自然科学基金(1308085QF105);中国博士后科学基金(2015M572673)
作者简介:董杰(1991-),男,甘肃武威人。硕士生,研究方向为电子目标分析与情报处理。
通信地址:230037安徽合肥电子工程学院研究生管理大队研一队E-mail:dongjie53@hotmail.com
doi:10.3969/j.issn.1009-086x.2016.02.029
中图分类号:TN957.51
文献标志码:A
文章编号:1009-086X(2016)-02-0185-05
猜你喜欢
数字技术与应用(2016年10期)2017-04-01 15:19:13
科技创新与应用(2017年6期)2017-03-23 13:24:40
中国新通信(2017年3期)2017-03-11 21:51:31
中国水运(2017年1期)2017-02-27 23:45:33
中国水运(2016年11期)2017-01-04 12:26:13
电脑知识与技术(2016年28期)2016-12-21 12:13:14
电子技术与软件工程(2016年20期)2016-12-21 10:21:33
价值工程(2016年32期)2016-12-20 20:36:15
科学与财富(2016年28期)2016-10-14 23:45:18
中国科技博览(2016年8期)2016-04-25 06:51:25