基于LPC技术的运动车辆目标分类研究*
2016-07-21 05:19:32丁帅帅张群张亮李开明王恺
现代防御技术 2016年2期
丁帅帅,张群,张亮,李开明,王恺
(空军工程大学a.信息与导航学院,陕西 西安 710077)
探测跟踪技术
基于LPC技术的运动车辆目标分类研究*
丁帅帅a,张群a,张亮a,李开明a,王恺
(空军工程大学a.信息与导航学院,陕西 西安710077)
摘要:将线性预测编码(LPC)技术应用于运动车辆目标的多普勒特征提取中。首先,基于微多普勒原理建立了车辆目标雷达回波模型,分析了履带式车辆和轮式车辆各自回波的特点。其次,针对杂波干扰问题,采用CLEAN算法对其进行抑制。在此基础上,利用实测数据,提取了不同车辆目标多普勒的LPC系数,给出了预测误差和计算时间在不同LPC阶数条件下的变化趋势。最后利用学习向量量子化(LVQ)方法对提取的LPC系数进行分类,实验结果证明了LPC技术在车辆目标分类中的有效性。
关键词:线性预测编码;运动车辆;微多普勒;CLEAN算法;学习向量量子化(LVQ);目标分类
0引言
运动车辆目标主要包括轮式车辆和履带式车辆。轮式车辆重量轻,机动性好,适合平坦路面的运输与作战任务。履带式车辆载重大,防护性好,适合复杂地形条件下的作战任务[1]。轮式车辆与履带式车辆基于其各自特点,在现代战场中通常承担不同的作战任务,决定了其威胁程度不同。因此,如何对轮式车辆、履带式车辆进行分类,对现代战争中的地面侦察、战场态势感知、威胁评估、指挥决策及精确打击具有重要价值[2]。
目前对运动车辆目标的分类研究已经较为广泛和深入。其中主要有基于高分辨率一维距离像的识别方法[3],基于目标雷达图像的识别方法[4],但算法复杂且严重依赖于图像质量。对于低分辨率雷达,目标的距离像仅占一个或若干个距离单元,且受杂波影响,从中难以得到识别信息。特别是轮式车辆与履带式车辆具有相近的外形特征,这使得依靠雷达图像的识别方法难以有效胜任。而微动特性是目标的特有属性[5-7],如轮式车辆的车轮旋转,履带式车辆的履带运动等引起的微多普勒效应,为雷达目标分类、识别提供了新途径[5,8]。
在目标识别领域,文献[9]将DTW(dynamic time wraping)技术运用到微多普勒特征提取中,基于模板库实现了轮式车、履带式车和行人的识别。加拿大渥太华防御技术研发中心的T. Thayaparan建议研制单兵便携式微多普勒雷达(man-portable “micro-Doppler radar”),以用于战场监控和灾难救援[10]。英国Thales公司的基于微多普勒特征的单兵便携式监测跟踪雷达(MSTAR),对行人、轮式车和履带车3类目标分类的正确率超过了80%[11]。文献[11]利用主分量分析(PCA)法,并结合线性判决分析(LDA)对车辆目标进行分类识别。考虑到速度变化对目标多普勒谱位置的影响,文章增加了对目标速度进行对齐的预处理过程。但由速度变化引起的多普勒谱宽变化问题并未得到解决,这会对分类结果产生影响。文献[12]利用线性预测编码(LPC)技术提取了7种不同姿态人体目标的LPC系数,将提取的LPC系数作为支持向量机(SVM)的输出参数,对其进行分类,取得了较好的分类结果。
基于上述研究背景,本文将LPC技术应用到地面车辆目标的分类研究中。第2节建立了车辆目标的回波模型,分析了轮式车辆和履带式车辆的多普勒特征,并结合雷达实测数据,验证了模型分析的正确性。第3节以实测数据为基础,针对杂波干扰问题,利用CLEAN算法对其进行抑制。在杂波抑制的基础上,提取了不同车辆目标的LPC系数,给出了均方误差和运算时间随LPC阶数的变化趋势。最后结合学习向量量子化(LVQ)分类方法对提取出的LPC系数进行分类,分类结果表明本文所提方法具有较好的识别性能。
1车辆目标雷达回波建模
运动车辆目标的运动状态可分解为2部分,一部分是车辆目标的主体平动,另一部分是车轮或者履带的转动。前者产生多普勒效应,后者产生微多普勒效应。

R0=(R0cosαcosβ,R0sinαcosβ,R0sinβ),
(1)
于是,雷达视线的单位矢量变为
n=(cosαcosβ,sinαcosβ,sinβ)T.
(2)
图1 轮式车辆运动示意图Fig.1 Motion diagram of wheeled vehicles

图2 履带式车辆运动示意图Fig.2 Motion diagram of tracked vehicles

作为第一个打击网络犯罪的国际性公约,《公约》在第二章第二条至第十条中制定了签署国需要对九类网络犯罪行为以刑法处罚。其中非法侵入计算机信息系统罪、干扰计算机系统罪、非法干扰计算机数据罪、非法拦截计算机数据罪和滥用计算机设备罪的规定同我国刑法的规定相类似。但是,《公约》的相关规定却相对完善,值得我国在完善网络犯罪的立法上借鉴。

(3)
RP=R0+vt+rt.
(4)
散射点P在雷达视线方向上的投影距离为
RP=RP·n≈

(5)
以线性调频信号为例,t时刻雷达基带回波信号为

(6)

履带运动如图2所示。上履带AD长度为2L1,下履带BC长度为2L2,前端履带倾斜角为γ,车轮半径为r,车轮边缘间距为Δd。
散射点P在雷达视线方向上的投影距离分别为
vtsinαcosβ,
(7)
vtsinαcosβ,
(8)
vtsinαcosβ,
(9)
vtsinαcosβ,
(10)
式中:y1,y2,y3,y4分别表示散射点在AB,BC,CD,AD段的初始位置。
雷达基带回波信号为各部分回波信号之和:

(11)
通过式(11)可以看出,当平动速度为v时,履带BC段和AD段分别在0和2fd处产生多普勒调制,AB段和CD段在0至2fd范围内产生微多普勒调制。
图3,4分别给出了轮式车辆和履带式车辆未进行杂波抑制的实测单帧雷达回波。雷达参数如表1所示。

表1 雷达参数
雷达目标包括一种轮式车辆和一种履带式车辆,车辆运动速度4~8 m/s,雷达距车辆目标1.5 km,每个雷达脉冲信号采一个点,每64个脉冲回波做MTD积累。

图3 轮式车辆单帧回波信号Fig.3 Echo signal of wheeled vehicles

图4 履带式车辆单帧回波信号Fig.4 Echo signal of tracked vehicles
2基于LPC技术的实测数据分析
车辆目标的雷达回波主要受以下2个因素的影响:第1,车辆目标的雷达回波中包含了大量的地杂波。杂波一般是由静止或者低速目标引起,通常位于微多普勒谱中的零频附近。第2,车辆目标在行驶过程中速度通常变化,这将导致同一目标在不同的速度条件下,由车身平动分量引起的多普勒出现在不同的频率位置。
杂波并不包含目标信息,因此对雷达回波进行分析时,需要对杂波进行抑制。文献[13]介绍了CLEAN算法可以去除特定的单频成分。图5, 6为利用CLEAN算法去除杂波后的车辆目标雷达回波,可以看出,CLEAN算法可以有效抑制车辆目标多普勒中的杂波成分。
图5 轮式车辆多普勒去杂波Fig.5 Clutter suppression in Doppler of wheeled vehicles
图6 履带式车辆多普勒去杂波Fig.6 Clutter suppression in Doppler of tracked vehicles
轮式车辆与履带式车辆由于其结构和材质不同,使得两者的雷达回波具有各自特点。具体表现为:轮式车辆主要为车身平动分量;履带式车辆除车身平动分量外,还包括2v分量及微多普勒成分。速度的变化会使车身分量的峰值位置发生移动,也会导致多普勒谱展宽发生变化,但并不能改变车辆目标的多普勒成分。LPC技术的应用,正是基于多普勒成分提取LPC系数,多普勒成分的不同使得提取出的LPC系数也具有不同特点,正是基于此,得以实现不同车辆目标的分类,这在文献[13]的实验结果中得到了证明。由于速度的变化不会对LPC系数的提取产生影响,与文献[11]相比,LPC技术的应用减少了速度预处理的过程。
基于以上背景,本文将LPC技术引入到车辆目标的分类识别中,提取出的不同LPC系数表征了不同的多普勒特征,进而可以将LPC系数作为车辆目标的分类依据。其算法流程图如图7所示。

图7 基于LPC技术的车辆目标分类流程图Fig.7 Flow chart of vehicle targets classification based on LPC
LPC技术的基本原理为[14]:


(12)
式中:a1,a2,…,ap称为线性预测系数。

(13)
可见,预测误差e(n)是信号s(n)通过具有如下传递函数的系统输出

(14)

图8 LPC误差滤波器Fig.8 Error filter of LPC
图9~12给出了使用CLEAN算法对车辆目标原始雷达回波进行杂波抑制的效果对比。比较可以看出,CLEAN算法在抑制杂波的同时,很好的保存了原始信号中的多普勒和微多普勒成分,这使得后续工作可以利用LPC技术对其进行分类和识别。

图9 轮式车辆原始雷达回波Fig.9 Original radar echo of wheeled vehicles

图10 履带式车辆原始雷达回波Fig.10 Original radar echo of tracked vehicles
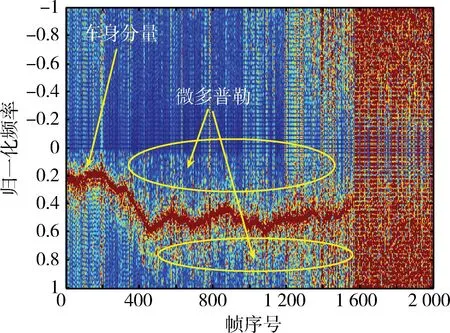
图11 轮式车辆去杂波Fig.11 Clutter suppression of wheeled vehicles

图12 履带式车辆去杂波Fig.12 Clutter suppression of tracked vehicles
由于履带式车辆结构的特殊性,在特定的雷达视线方向上可以观测到由上履带产生的2v分量,而2v分量是履带式车辆所特有的。因此在对履带式车辆雷达回波进行处理时,选取了杂波抑制后的含有2v分量的0~400帧雷达回波,如图13所示。

图13 含2v分量的履带式车辆雷达回波Fig.13 Radar echo of tracked vehicles with 2v components
为了保证实验数据的客观真实性,随机抽取了杂波抑制后的100帧雷达回波,对其做LPC处理,运行环境为Core-i5 3.2 GBZ处理器,4 GB内存,Matlab7.1。对100帧数据的实验结果取平均值,得到了不同LPC阶数条件下的均方误差和运算时间的变化趋势,如图14,15所示。
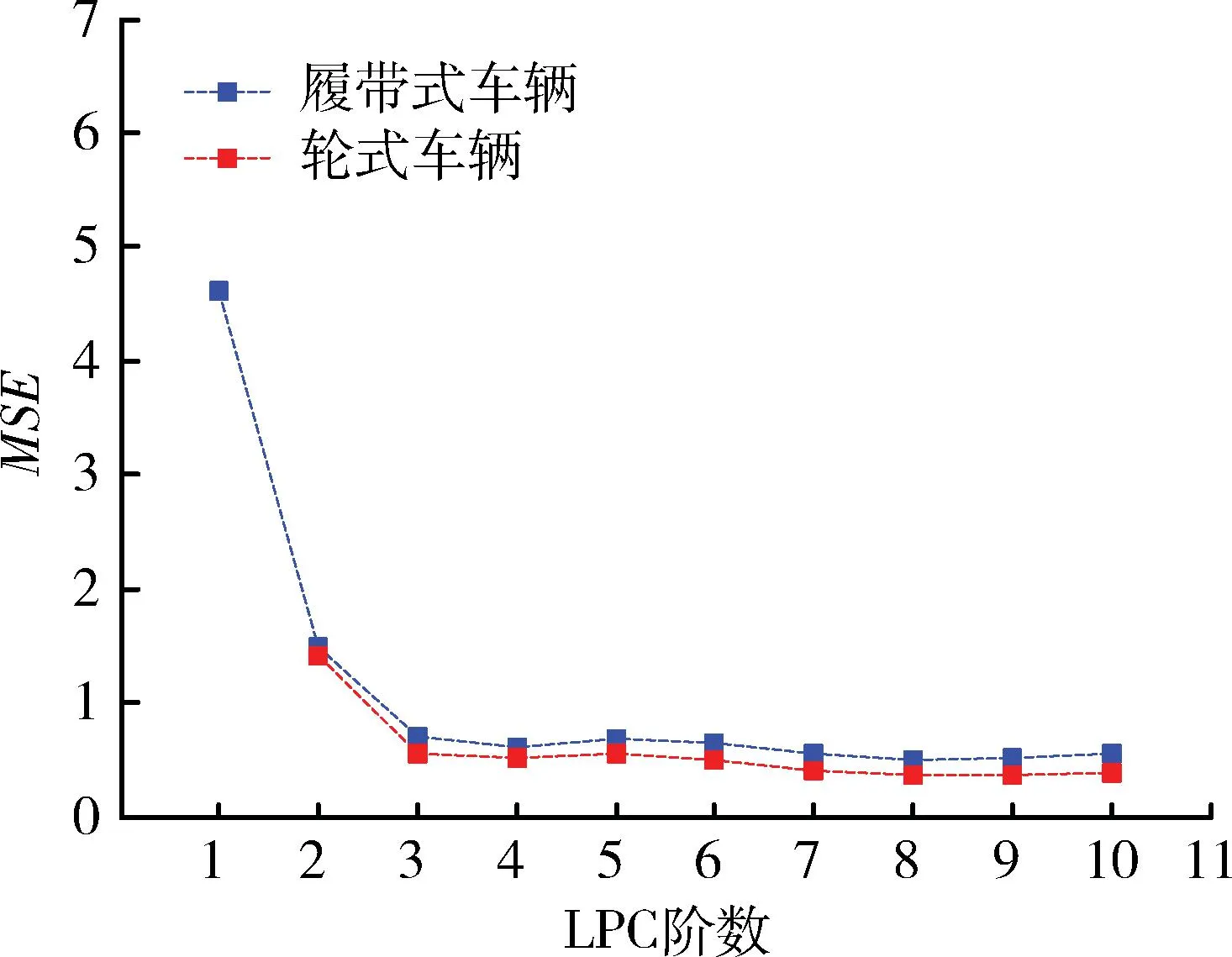
图14 均方误差随LPC阶数的变化趋势Fig.14 MSE depending on the number of LP coefficients

图15 运算时间随LPC阶数的变化趋势Fig.15 Computational time depending on the number of LP coefficients
通过图14,15可以看出,随着LPC阶数的增加,均方误差逐渐减小并趋于稳定,运算时间不断增大。这是因为阶数的增加使得预测精度得以提高,但LPC滤波器模型变得更复杂。
车辆目标雷达回波经过上述处理后,选用学习向量量子化(LVQ)方法对提取的LPC系数进行分类。
图16为利用LVQ对提取出的LPC系数进行分类的实验结果。结果表明,对于轮式车辆和履带式车辆都存在一个最优LPC阶数,使得识别率最高。理论上,LPC系数的增加有助于识别率的提高,这是因为高阶LPC系数可以获取更多的目标信息。但是,由于学习样本有限,不断增加的高阶系数会使训练误差过小,反而导致泛化能力下降,产生过度拟合(过学习)问题。因此,目标识别率并不随着LPC阶数的增加而无限提高。
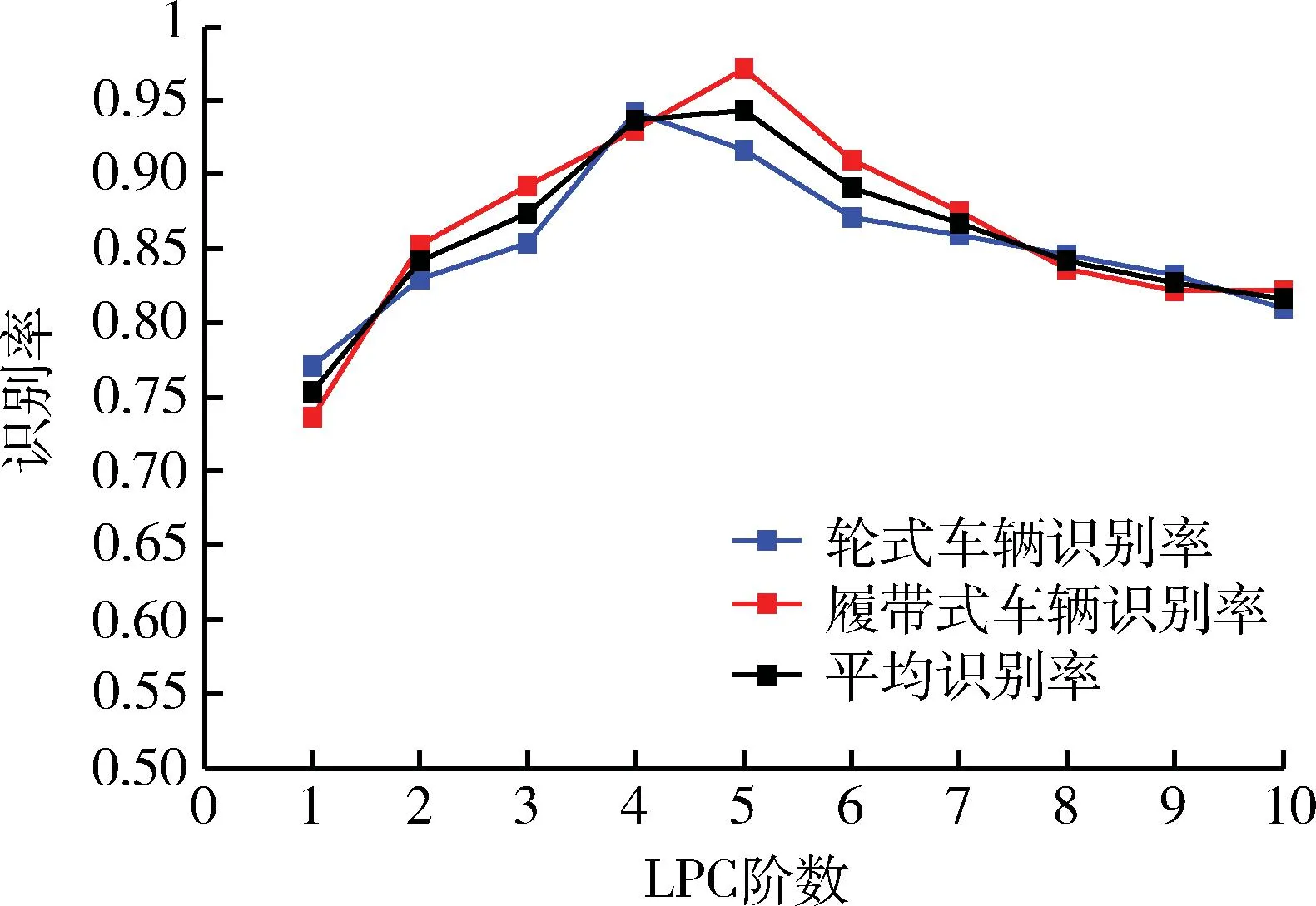
图16 LVQ分类结果Fig.16 Accuracy of classification by LVQ
图17,18分别为在4阶、5阶LPC系数条件下重构的轮式车辆与履带式车辆雷达回波信号与原始信号的比对。LPC重构信号与原始信号相比,具有很高的相似度,可以较好地还原出原始雷达回波的信号特点,这与图16的分类结果吻合。

图17 轮式车辆的LPC重构信号与原始信号对比Fig.17 LPC estimate vs original signal of wheeled vehicle

图18 履带式车辆LPC重构信号与原始信号对比Fig.18 LPC estimate vs original signal of tracked vehicle
同时,给出了文献[15]所提方法在相同实测数据上的分类结果作为比对。比对结果由表2给出。可以看出,本文方法在识别率上优于文献[15]所提方法,另外与文献[15]相比,本文方法减少了速度归一化过程,更加有利于雷达数据的实时处理。

表2 实测数据分类结果
3结束语
本文推导并分析了履带式车辆和轮式车辆的多普勒特征,使用CLEAN算法对多普勒中的杂波成分进行了抑制。基于实测数据,利用LPC技术,提取了车辆目标多普勒特征的LPC系数,并针对不同阶数条件下的LPC系数,给出了均方误差和计算时间的变化趋势。利用提取出的LPC系数,结合LVQ,实现了车辆目标的分类。
理论和实验结果表明,轮式车辆和履带式车辆的多普勒具有不同特点,在杂波抑制的基础上,不同车辆目标多普勒的LPC系数不同,据此可将2种目标区分开。基于LPC技术的车辆目标分类研究,对雷达地面目标的分类与识别具有参考作用。
参考文献:
[1]李彦兵. 基于微多普勒效应的运动车辆目标分类研究[D]. 西安: 西安电子科技大学, 2012.
LI Yan-bing. Study on Classification of Moving Vehicles Based on Micro-Doppler Effect [D]. Xi’an: Xidian University, 2012.
[2]Nipon Theera-Umpon, Mohamed A Khabou. Detection and Classification of MSTAR Objects Via Morphological Dhared-Weight Neural Networks [C]∥Proceedings of SPIE on Algorithms for Synthetic Aperture Radar Imagery,Orlando, USA: SPIE, 1998: 530-540.
[3]LI Y, LIU H, BAO Z. Radar HRRP Recognition Based on the Minimum Kullback Leibler Distance Oriterion [J]. Journal of Electronics (China), 2007, 24(2): 199-203.
[4]GUO W, QI Q, JIANG L L, et al. A New Method of SAR Image Target Recognition Based on AdaBoost Algorithm [C]∥IEEE International Geoscience and Remote Sensing Symposium, IGARSS, Boston, Massachusetts, July, 2008, Ⅲ: 1194-1197.
[5]章捷, 童宁宁, 冯存前, 等. 基于Hough变换撤票策略的目标微多普勒提取[J].现代防御技术, 2013, 41(3): 133-143.
ZHANG Jie, TONG Ning-ning, FENG Cun-qian, et al. Micro-Doppler Extraction of the Withdrawal Vote Strategy of Hough Transform [J]. Modern Defence Technology, 2013, 41(3): 133-143.
[6]CHEN V C, LI F,HO S S, et al. Analysis of Micro-Doppler Signatures [J]. IEEE Proceedings Radar, Sonar & Navigation, 2003(4): 271-276.
[7]CHEN V C, LI F, HO S S, et al. Micro-Doppler Effect in Radar: Phenomenon, Model, and Simulation Study [J]. IEEE Transaction on Aerospace and Electronic System, 2006, 42(1):2-21.
[8]LI Y, LIU H,BAO Z. Radar HRRP Recognition Based on the Minimum Kullback Leibler Distance Oriterion [J]. Journal of Electronics (China), 2007, 24(2): 199-203.
[9]SMITH G E, WOODBRIDGE K, BAKER C J. Template Based Micro-Doppler Signature Classification [C]∥Radar Conference, Manchester, UK. 3rd European, Sept., 2006: 158-161.
[10]THAYAPARAN T, ABROL S, RISEBOROUGH E. Micro-Doppler Radar Signatures for Intelligent Target Recognition [J]. Technical Memorandum, DRDC Ottawa, TM 2004-170, September 2004.
[11]STOVE A G, SYKES S R. A Doppler-Based Automatic Target Classifier for a Battlefield Surverllance Radar [C]∥2002 International Radar Conference, Edinburgh, UK, Oct 15-17, 2002: 419-423.
[12]Rios Jesus Javier, Youngwook Kim. Application of Linear Predictive Coding for Human Activity Classification Based on Micro-Doppler Signatures [J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(10): 1831-1834.
[13]TSAO J, STEINBER G B D. Reduction of Sidelobe and Speckle Artifacts in Microwave Imaging: the CLEAN Technique [J]. IEEE Transactions on Antennas and Propagation, 1988, 36(4): 543-556.
[14]张雪英. 数字语音处理及MATLAB仿真[M]. 北京: 电子工业出版社, 2010.
ZHANG Xue-ying. Digital Audio Processing and MATLAB Simulation[M]. Beijing: Electronic Industry Press, 2010.
[15]李彦兵, 杜兰, 刘宏伟. 基于微多普勒效应和多级小波分解的轮式履带式车辆分类研究[J]. 电子与信息学报, 2013, 35(4): 894-900.
LI Yan-bin, DU Lan, LIU Hong-wei. Study on Classification of Wheeled and Tracked Vehicles Based on Micro-Doppler Effect and Multilevel Wavelet Decomposition [J]. Journal of Electronics & Information Technology, 2013, 35(4): 894-900.
Classification of Moving Vehicles Based on Linear Predictive Coding
DING Shuai-shuaia, ZHANG Quna, ZHANG Lianga, LI Kai-minga, WANG Kai
(AFEU,a. Information and Navigation College,Shaanxi Xi’an 710077, China)
Abstract:Linear predictive coding (LPC) is utilized to the Doppler feature extraction of moving vehicles. Firstly, radar returned echoes model of moving vehicles is established based on micro-Doppler effect. The echo characteristics of moving wheeled and tracked vehicle are analyzed. Then, according to the clutter jamming, CLEAN algorithm is used to restrain it. On this basis, the coefficients from a linear predictive model are extracted as Doppler features of different vehicles by radar measured date. The changing trends of forecast error and operation time are given with different numbers of LPC coefficients. Finally, learning vector quantity (LVQ) is used for classification. The experimental results validate the effectiveness of LPC method in the classification of vehicles.
Key words:linear predictive coding (LPC); moving vehicles; micro-Doppler; CLEAN algorithm; learning vector quantity (LVQ); target classification
*收稿日期:2015-04-23;修回日期:2015-07-07
基金项目:基于图像稀疏分解理论的空间群目标分辨与微动特征提取(61471386);陕西省统筹创新工程-特色产业创新链项目(S2015TDGY0045)
作者简介:丁帅帅(1992-),男,山东枣庄人。硕士生,主要研究方向为空天目标探测与识别。
通信地址:710077陕西省西安市莲湖区丰镐东路1号E-mail:dingdds@163.com
doi:10.3969/j.issn.1009-086x.2016.02.028
中图分类号:TN957.51
文献标志码:A
文章编号:1009-086X(2016)-02-0177-08