
基于摩擦模型的固冲发动机流量调节控制*
2016-07-21 05:18李勇
现代防御技术 2016年2期
李勇
(中国空空导弹研究院, 河南 洛阳 471009)
导弹技术
基于摩擦模型的固冲发动机流量调节控制*
李勇
(中国空空导弹研究院, 河南 洛阳471009)
摘要:针对固冲发动机流量调节伺服控制系统在实际运行中存在摩擦负载的问题,提出一种基于LuGre模型的自适应摩擦补偿方法。考虑到摩擦模型的参数会随系统变化而发生改变,采用反步(Backstepping)方法设计自适应摩擦补偿控制方案。在分析流量调节伺服系统数学模型的基础上,运用Matlab对伺服系统直流无刷电机电流、速度、位置三闭环系统进行建模和系统仿真,并与采用常规PID算法的系统进行了比较。仿真结果表明基于LuGre摩擦模型的Backstepping自适应摩擦补偿控制系统具有较好的给定适应性和抗干扰性,优于常规PID控制系统的性能。采用该补偿方案能有效地抑制摩擦干扰对伺服系统的不利影响,为提高固冲发动机流量调节伺服系统的动态跟踪性能奠定基础。
关键词:固冲发动机;流量调节;LuGre摩擦模型;电机伺服系统;自适应控制;反步控制
0引言
性能高、体积小、射程远的先进战术导弹是各国导弹发展的一个重要分支。整体式固冲火箭发动机兼有固体火箭发动机和冲压发动机二者的双重优点,比冲高、结构轻巧、工作可靠、使用方便,能满足新型战术导弹的要求。因此各国在面空、空空和空面导弹上热衷于采用整体式固冲发动机[1-2]。
由于导弹射程的大幅度提高和发动机各种性能的充分实现与整体式固体火箭冲压发动机的燃气流量大范围可调密不可分。因此,目前燃气流量调节技术是国内外研究的热点,美国、俄罗斯及欧洲等国展开了大量研究,欧洲联合研制的“流星”导弹其推进系统就采用了可变流量的固体火箭冲压发动机[3-4]。
本文采用的燃气流量调节方法主要是通过各种传感器和导弹飞行控制参数来获得固冲导弹的工作高度、速度和攻角,输入微计算机后,按预定的控制规律,经运算后指挥微电机相应改变燃气发生器喷管的喉部面积,调节燃气流量,达到恰当的空燃比,以保持发动机较高的比冲和恰当的推力系数。
1固冲发动机燃气发生器燃气流量调节方案
固体火箭冲压发动机燃气流量控制方案大部分是利用机械阀门调节燃气发生器的喷喉截面积来控制燃气发生器的内部工作压力,从而实现燃气发生器的燃气流量可控。在喷喉截面积调节装置位置闭环的基础上引入压力闭环,可以有效地解决喷管喉径烧蚀、固体颗粒物沉积引起燃气发生器输出流量与期望值误差较大等问题[5]。
传统控制系统采用的传动机构一般包括3种:液压传动、电机传动、气压传动。根据固体火箭冲压发动机工作环境及工作特点,考虑到导弹系统所能提供的能源及导弹空间的限制,电机传动通常更受欢迎。
本系统包括试验用燃气发生器、流量调节装置、点火与测试系统、燃气压力控制系统等,试验用药为含硼贫氧药,燃气发生器的压力为控制量进行闭环控制,测量得到的燃气发生器压力送到压力控制系统与期望的压力曲线进行比较,控制算法给出调节装置的运动信号,调节板转动,改变喉部面积,达到改变燃气发生器压力继而改变流量的目的。流量调节装置工作原理如下:伺服电机根据控制信号大小转动,通过一系列的减速机构带动调节轴和调节板转动,从而改变喷管通气面积,燃气发生器燃气压力随之改变,达到调节流量的目的。同时采用电位器检测调节轴的转动角度,构成角度反馈控制系统[6]。在高精度伺服系统中,由于非线性摩擦环节的存在,使伺服系统的动态及静态性能受到很大程度的影响,主要表现为低速时出现爬行现象,稳态时有较大的静差或出现极限环振荡。因此,减弱或消除摩擦环节的影响,改善流量调节伺服系统控制性能、提高位置跟踪精度是一项非常重要并且需要解决的任务。
2伺服系统摩擦现象及LuGre摩擦模型
2.1伺服系统的摩擦现象
摩擦现象是一种复杂的、非线性的、具有不确定性的自然现象,摩擦学的研究结果表明,人类目前对于摩擦的物理过程了解还只停留在定性认识阶段,无法通过数学方法对摩擦过程给出精确描述。但对于机械伺服系统而言,摩擦环节却成为提高系统性能的障碍,使系统出现爬行、振荡或稳态误差。为了减轻机械伺服系统中摩擦环节带来的负面影响,人们在大量的实践中总结出很多有效的方法,可概括为3类[7]:
(1) 改变机械伺服系统的结构设计,减少传动环节;
(2) 选择更好的润滑剂,减小动静摩擦的差值;
(3) 采用适当的控制补偿方法,对摩擦力(矩)进行补偿。
有关摩擦建模及动态补偿控制技术方面的研究具有近百年的历史,但由于当时控制理论和摩擦学发展水平的限制,使得这方面的研究一直进展不大,进入20 世纪80 年代以后,这一领域的研究渐渐活跃,许多先进的摩擦模型和补偿方法被相继提出,其中许多补偿技术已经在机械伺服系统的控制设计中得到了成功的应用。
在伺服系统辨识中,选择一个合适的摩擦模型是非常重要的,实践表明,采用简单的库仑摩擦+粘性摩擦作为摩擦模型,其效果并不理想。目前,已提出的摩擦模型很多,主要有Karnopp 模型、LuGre 模型及综合模型。其中,LuGre 模型是Canudas 等在1995 年提出的典型伺服系统的摩擦模型,该模型能够准确地描述摩擦过程的复杂的动态、静态特性,如爬行(stick slip)、极限环振荡(hunting)、滑前变形(presliding displacement)、摩擦记忆(friction memory)、变静摩擦(rising static friction)及静态Stribeck 曲线[8]。
2.2伺服系统的LuGre摩擦模型
LuGre 摩擦模型[9-10]可描述如下:
对于伺服系统,用下面的微分方程表示:

(1)
式中:J为转动惯量;θ为转角;u为控制力矩;F为摩擦力矩。设状态变量z代表接触面鬃毛的平均变形(bristle deform),则F可由下面的LuGre模型来描述:

(2)

(3)

(4)
式中:σ0,σ1为动态摩擦参数;Fc,Fs,α,vs为静态摩擦参数;其中Fc为库仑摩擦;Fs为静摩擦;α为粘性摩擦系数;vs为切换速度。
3流量调节伺服系统三闭环PID控制
本流量调节装置伺服电机选用直流无刷电机,在低速情况下具有较强的摩擦现象,此时控制对象变为非线性,很难用传统PID控制方法达到高精度控制。
3.1流量调节伺服系统三闭环控制结构
流量调节装置采用全闭环控制系统,而且是三环控制,由里向外分别是电流环、速度环、位置环。流量调节伺服系统执行机构为典型的直流电动驱动机构,其控制结构如图1所示。电机输出轴直接与负载-转动轴相连,为使系统具有较好的速度和加速度性能,引入测速机信号作为系统的速度反馈,直接构成模拟式速度回路。由高精度圆感应同步器与数字变换装置构成数字式角位置伺服回路。
3.2基于LuGre摩擦模型自适应补偿的流量调节伺服系统PID控制
基于摩擦模型的摩擦补偿方法的实质是前馈补偿,分为固定模型补偿及自适应补偿2种,本文中采用自适应的摩擦补偿方法[11-12]。流量调节伺服系统采用无刷直流电动机,若伺服系统除摩擦非线性因素之外不考虑其他非线性因素影响,则流量调节伺服系统的动力学方程为
(5)
式中:J为等效转动惯量;b为等效阻尼系数;θ为电机角位置;ω为电机角速度;Kt为电机力矩常数;u为系统控制量;F为等效摩擦力矩;TL为等效负载力矩(包括外界扰动作用)。
基于LuGre摩擦模型补偿控制方法的控制框图如图2所示。
摩擦受到温度变化影响会导致参数发生变化,引入ζ来反映参数受到温度变化的影响。此时LuGre模型摩擦力矩:

(6)
由于LuGre模型的中间变量鬃毛形变量不可直接测量,本文针对以上动力学方程,采用反步(Back-stepping)设计方法,进行具有鲁棒性的自适应摩擦补偿控制器设计[13-14],提出一非线性观测器来估计鬃毛形变量z。

图1 流量调节伺服系统框图Fig.1 Flow regulation servo control system

图2 基于LuGre摩擦模型补偿的流量调节PID控制系统结构Fig.2 Flow regulation PID control system based on LuGre model friction compensation
观测器方程
(7)
式中:ρ为观测器的误差补偿项。
首先,定义角位置输出误差和角速度误差:
e1=θref-θ,
(8)
e2=ωref-ω,
(9)
θref为参考位置信号,参考速度信号如下:

(10)
为有效地减小摩擦对系统的影响,设计如下的控制律和参数自适应律:

(11)
ρ=e2φ,
(12)

(13)
(14)
式中:k,k1,k2均大于0。


对于流量调节伺服系统,若采用式(11)~(14)的控制律和参数自适应律,则闭环系统是渐近稳定的。
证明:定义如下的Lyapunov函数:

(15)
式中:r0>0,r1>0, 式(15)对时间的微分有

(16)
从而系统的闭环稳定性得证。
在传统的电机控制系统中,转速、电流调节器大多采用PID控制:PID控制是最简单实用的一种控制方法,其控制参数既可以依靠数学模型通过解析的方法进行整定,也可以不依赖模型而凭经验和试凑来整定。但本文的流量调节伺服控制系统由于考虑了摩擦因素的影响,系统具有很强的非线性,而传统PID控制本质上是一种线性控制器,鲁棒性较差,无法达到高精度跟踪控制效果,在速度跟踪时有明显的“死区”现象[15]。
仿真主要用来验证本文所提的基于LuGre模型的反步自适应摩擦补偿算法的有效性,并与传统的PID控制方法进行比较。
伺服系统参数:
J=0.6 kg·m2,b=0.5 N·ms/rad,KT=1,
TL=0.5 N·m;
摩擦模型参数:
σ0=100 N·m,σ1=2 N·m,Fc=0.28 N·m,
Fs=0.34 N·m,α=0.02 N·ms/rad,
Vs=0.01 rad/s;
反步自适应控制器参数:
k1=80,k2=60,k=5,r0=1.5,r1=8。
本文采用Matlab的m文件进行编程仿真,可以快速方便地实现多种规则和参数的准确仿真效果,极大的提高系统设计效率和准确性。
首先,设置正弦跟踪信号指令为
yd(t)=0.10sin(2πt),仿真时间为2 s。分2种情况进行仿真:M=1时,为带有LuGre摩擦环节的PID控制;M=2时,为基于LuGre摩擦模型采用反步(Backstepping)方法设计的自适应摩擦补偿控制。
在PID控制器中取Kp=200,Ki=0,Kd=40。仿真结果如图3~6所示。
对比图3,4可以看出,在带有LuGre摩擦模型条件下,位置跟踪存在“平顶”现象,速度跟踪存在“死区”现象。采用PID控制鲁棒性差,不能达到高精度控制。

图3 带LuGre摩擦环节时的PID控制位置跟踪Fig.3 PID control position tracking with LuGre friction model
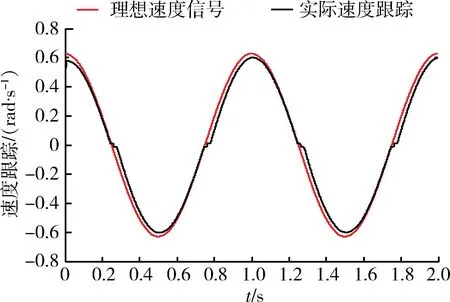
图4 带LuGre摩擦环节时的PID控制速度跟踪Fig.4 PID control speed tracking with LuGre friction model

图5 摩擦力随角速度的变化Fig.5 Friction force change by angular speed

图6 带LuGre摩擦环节时的摩擦力矩变化曲线Fig.6 Moment of friction force change with LuGre model
M=2时,采用基于LuGre摩擦模型的反步(Backstepping)方法设计的自适应摩擦补偿控制方案,仿真结果如图7,8所示。
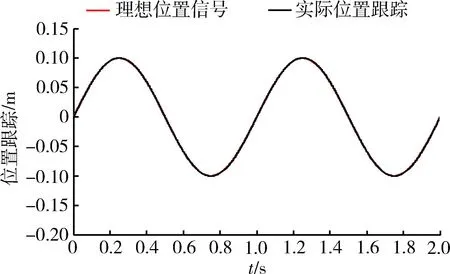
图7 基于反步自适应摩擦补偿控制的位置跟踪Fig.7 Position tracking based on backstepping adaptive friction compensation control method

图8 基于反步自适应摩擦补偿控制的速度跟踪Fig.8 Speed tracking based on backstepping adaptive friction compensation control method
通过以上2图可以看出,引入基于LuGre摩擦模型的反步(Backstepping)方法设计的自适应摩擦补偿后,流量调节伺服系统位置跟踪、速度跟踪精度有了很大的改善,基本消除了摩擦环节给伺服系统带来的各种负面影响,速度、位置跟踪基本不振荡,稳态误差可以忽略不计,验证了该摩擦补偿控制策略的有效性。
4结束语
针对流量调节伺服控制系统非线性摩擦环节对其定位和低速跟踪精度的影响,为改善其控制性能、提高位置跟踪精度,本文基于LuGre摩擦模型采用反步(Backstepping)方法设计的自适应控制算法对伺服系统的摩擦补偿控制策略进行研究。在流量调节伺服系统动力学模型建立的基础上,对伺服系统的摩擦补偿控制器进行了设计,最后进行数值仿真。通过数值仿真的结果看出,引入基于LuGre摩擦模型补偿后,流量调节伺服系统的位置跟踪精度有了很大的改善,验证了该摩擦补偿控制策略的有效性,也为固冲发动机流量调节伺服运动系统摩擦补偿的研究奠定了一定的理论基础。
参考文献:
[1]何洪庆,陈旭扬,孙贵宁,等.固冲发动机的流量调节技术——流量调节系统设计[J].战术导弹技术,2009(2):36-40.
HE Hong-qing,CHEN Xu-yang,SUN Gui-ning,et al.Flow Regulation Technique of Solid Ramjet:Design of Flow Regulation System[J].Tactical Missile Technology,2009(2):36-40.
[2]牛文玉.燃气流量可调的固体火箭冲压发动机控制方法研究[D].哈尔滨:哈尔滨工业大学,2009.
NIU Wen-yu.Study on Control Methods for Variable Flow Ducted Rockets[D].Harbin:Harbin Institute of Technology,2009.
[3]侯晓静,莫展.固冲发动机燃气流量调节阀设计与调节特性研究[J].弹箭与制导学报,2011,31(2):123-126.
HOU Xiao-jing,MO Zhan.The Adjusting Valve Design and Adjusting Performance Study for Solid-Rocket Ramjet Motor [J].Journal of Projectiles,Rockets,Missiles and Guidance,2011,31(2):123-126.
[4]陈怡,闫大庆.流星导弹的关键技术及最新研制进展 [J].飞航导弹,2012(6):17-21.
CHEN Yi,YAN Da-qing.Meteor Missile Key Technology and The Latest Research Progress[J].Aerodynamic Missile Journal,2012(6):17-21.
[5]聂聆聪,刘志明,刘源祥.流量可调燃气发生器压力闭环模糊控制算法[J].推进技术,2013,34(4):551-556.
NIE Ling-cong,LIU Zhi-ming,LIU Yuan-xiang.Pressure Close Loop Fuzzy Control Method of a Flow Adjustable Gas Generator[J].Journal of Propulsion Technology,2013,34(4):551-556.
[6]兰飞强,王丽娟,程翔,等.一种固冲发动机用流量调节装置设计[J].弹箭与制导学报,2012,32(3):148-151.
LAN Fei-qiang,WANG Li-juan,CHENG Xiang,et al.A Flow Controller Design for Solid-Rocket Ramjet Motor[J].Journal of Projectiles,Rockets,Missiles and Guidance, 2012,32(3):148-151.
[7]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011:64-73.
LIU Jin-kun.The Advanced PID Control Matlab Simulation[M].3rd ed.Beijing:Publishing House of Electronics Industry,2011:64-73.
[8]麻恒进,孟凡军,李碧政,等.一种惯导测试转台摩擦力模型及其参数辨识方法[J].航空精密制造技术,2014,50(6):22-24.
MA Heng-jin,MENG Fan-jun,LI Bi-zheng,et al.A Friction Model and its Parameters Identification Method for Turntable[J].Aviation Precision Manufacturing Technology,2014,50(6):22-24.
[9]丛中旖.基于LuGre模型的伺服转台自适应反演滑模控制[J].四川兵工学报,2014,35(7):76-77.
CONG Zhong-yi.Adaptive Backstepping Sliding Mode Control of Servo Turntable Based on LuGre Model[J].Journal of Sichuan Ordnance,2014,35(7):76-77.
[10]郭健,季晶晶,杨帆,等.基于LuGre摩擦模型的伺服系统自适应鲁棒控制器[J].南京理工大学学报,2013,37(6):780-781.
GUO Jian,JI Jing-jing,YANG Fan,et al. Adaptive Robust Controller for Servo System Based on LuGre Model of Friction[J].Journal of Nanjing University of Science and Technology,2013,37(6):780-781.
[11]王毅,何朕.伺服系统的摩擦补偿[J].电机与控制学报,2013,17(8):110-111.
WANG Yi,HE Zhen.Friction Compensation for Servo Systems[J].Electric Machines and Control,2013,17(8):110-111.
[12]林雪,王中华,徐谦,等.机电伺服系统摩擦补偿的自适应滑模控制[J].济南大学学报:自然科学版,2013,27(2):132-133.
LIN Xue,WANG Zhong-hua,XU Qian, et al.Adaptive Sliding Mode Control of Friction Compensation in Servo System[J].Journal of University of Jinan:Nataral Science ed,2013,27(2):132-133.
[13]向红标,谭文斌,李醒飞,等.基于LuGre模型的自适应摩擦补偿[J].机械工程学报,2012,48(17):70-74.
XIANG Hong-biao,TAN Wen-bin,LI Xing-fei, et al.Adaptive Friction Compensation Based on LuGre Mode[J].Journal of Mechanical Engineering,2012,48(17):70-74.
[14]梁青,张剑,王永.基于修正LuGre模型的反步自适应摩擦补偿控制[J].微特电机,2011(11):67-69.
LIANG Qing,ZHANG Jian,WANG Yong.Adaptive Backstepping Friction Compensation Control Based on Modified LuGre Model[J].Small&Special Electrical Machines,2011(11):67-69.
[15]许宏,张怡,王凌,等.基于Stribeck摩擦模型的无刷直流电机控制系统设计与仿真[J].电机与控制应用,2011,38(2): 26-30.
XU Hong,ZHANG Yi,WANG Ling, et al. Design and Simulation of Brushless DC Motor Control System Based on Stribeck Friction Model[J].Electric Machines & Control Application,2011,38(2):26-30.
Design of Flow Regulation Control of Solid Rocket Ramjet Motor Based on Friction Model
LI Yong
(China Airborne Missile Academy,Henan Luoyang 471009, China)
Abstract:Aimed at the presence of friction load in actual operation of solid rocket ramjet motor flow regulation servo control system, an adaptive friction compensation based on LuGre model is presented. Considering the parameters of friction model changed with the system, the controller of adaptive friction compensation is designed through backstepping method. Based on the flow regulation servo system math model, the system of three-closed loop control of current and speed and position for brushless DC motor is modeled and simulated based on Matlab, and compared with normal PID′s. The simulation results show that the system which adopts backstepping adaptive friction compensation method based on LuGre model has good adaptability and antijamming ability, which is better than PID's. Therefore, the proposed compensation scheme can effectively inhibit the disadvantageous influence of friction and lay a foundation for improvement of dynamic performance of solid rocket ramjet motor flow regulation servo system.
Key words:solid rocket ramjet motor;flow regulation;LuGre friction model;motor servo system;adaptive control;backstepping control
*收稿日期:2015-03-12;修回日期:2015-07-07
作者简介:李勇(1980-),男,河南确山人。工程师,博士,研究方向为固冲发动机能量管理、控制方法研究。
通信地址:471009河南省洛阳市西工区解放南路166号030信箱4分箱E-mail:liyong@163.com
doi:10.3969/j.issn.1009-086x.2016.02.010
中图分类号:V435
文献标志码:A
文章编号:1009-086X(2016)-02-0061-07
