预警机协同下的空中作战机群突防区域分析与评估
2016-07-19 05:20崔继先张志虎
中国电子科学研究院学报 2016年3期
关键词:预警机
崔继先,张志虎
(1.中国电子科学研究院,北京 100041; 2. 中国西南电子设备研究所,四川成都 610036)
工程与应用
预警机协同下的空中作战机群突防区域分析与评估
崔继先1,张志虎2
(1.中国电子科学研究院,北京100041; 2. 中国西南电子设备研究所,四川成都610036)
摘要:预警机、电子干扰机、战斗机构成的机群如何协同空战是亟待解决的问题。本文建立了机群对突防飞机的截击模型,并建立了干扰条件下敌方雷达的暴露区求解模型。分析评估了有预警机指示与无预警机指示条件下,电子干扰机对敌方来袭飞机机载雷达的压制效果差异及战斗机突防区域。结论为在预警机指示下,电子干扰机对敌方雷达进行干扰压制,己方战斗机的突防区域扩充明显。分析过程及结果可为机群的作战流程设计、空间布站及任务规划等提供借鉴。
关键词:机群空战;预警机;电子干扰机;突防区域中图分类号:TN974
文献标识码:A
文章编号:1673-5692(2016)03-305-05
0引言
随着隐身战斗机、超音速巡航导弹等时敏目标的出现,单个作战单元的单打独斗已经无法适应体系对抗的新要求,现代空战需要多机种相互配合,预警机、电子战飞机、战斗机等联合出动,协同有序组织,方能实现单个作战单元的效能最大化,达成整体作战目的。在攻击敌突防飞机过程中,如何在敌机防区外打击、避免敌机的打击是机群体系作战的首要目标。
机群对敌方飞机打击过程中,预警机可为电子干扰机和战斗机提供目标的位置信息,进行远程目标指示。其中电子干扰机根据预警机提供目标方位信息,对目标进行干扰,压制对方雷达。由于电子干扰机已经得到目标的准确位置,可采用波束的最大增益角度对目标进行空间上的瞄准干扰。因此干扰天线增益的增加将导致敌方飞机火控雷达的暴露区被进一步压制,会增大己方战斗机的突防攻击方向与角度,进一步丰富己方战斗机的打击策略,可采用更加灵活的进攻方式达到打击敌方飞机的目的。
本文从机群对突防飞机的截击、电子干扰机的干扰特性、雷达探测原理出发,分析了电子干扰机的干扰范围、性能及己方战斗机的打击区域和打击方位等问题。在有预警机目标指示与无预警机目标指示情况下,对比求解己方电子干扰机的干扰区、敌方战斗机雷达的暴露区与己方战斗机的突防区域,通过特定算例分析得出相关结论。
1问题的引出
1.1作战场景介绍
机群由预警机、电子干扰机、战斗机组成,完成远距离独立作战。其中,预警机实现目标的远距离探测、识别和指挥引导等,电子干扰机进行远程或随队干扰,战斗机负责护航和目标打击。机群作战概念见图1。

图1 机群作战概念
己方作战机群与敌方突防飞机的空间示意见图2。

图2 机群发现敌方突防飞机
机群作战流程简述如下:己方预警机发现目标后对目标进行探测、识别、跟踪等,形成战场态势,并根据态势发出拦截指令。己方电子侦察机对敌方目标进行干扰,同时战斗机进入突防区域对敌方突防飞机进行打击,完成拦截。拦截过程见图3。
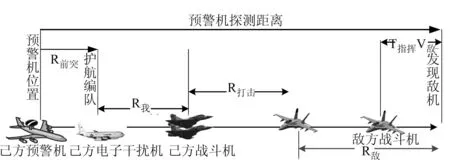
图3 拦截过程的示意图
图3中,己方战斗机与敌方飞机相向飞行,敌方飞机进入己方战斗机空空导弹射程后,己方立即实施攻击。
1.2待解决问题
问题一:预警机对电子干扰机进行目标指示,电子干扰机的干扰效率能否提高。
问题二:在预警机目标指示作用下,电子干扰机对敌方雷达进行干扰,敌方雷达暴露区如何变化。
问题三:依据敌方雷达暴露区范围,如何确定己方战斗机的突防区域。
通过以上问题的解答,能够支持机群体系作战流程,确定己方战斗机突防区域。以下对所提出的问题进行深入分析。
2理论模型
2.1机群对突防飞机的截击模型
基于图2的作战场景,预警机在R探测处发现目标,己方电子干扰机和战斗机前出R前出千米,此时电子干扰机与敌方目标距离为R探测-R前出。己方预警机经过t指挥时间后,下达战斗机拦截命令,此时敌方突防飞机飞行距离为R指挥=t指挥×V敌,随后己方战斗机与敌方突防飞机相向而行,距离R打击处敌方飞机进入己方战斗机的突防区域。
从己方预警机发现敌方突防飞机到敌方飞机进入己方战斗机突防区域经过的时间t1,可得出公式:
(1)
从己方预警机发现敌方突防飞机,到敌方飞机进入己方战斗机打击范围时间内,己方和敌方战斗机飞行距离及敌方战机与己方电子干扰机距离分别为:
(2)
(3)
根据电子干扰机的干扰原理和机群对来袭飞机的截击模型分析,可以分析己方机群对敌方突防飞机的干扰区域,进而求解己方战斗机的突防区域。下面分析电子干扰机对敌机的干扰区域。
2.2电子干扰机干扰区域计算和分析
电子干扰机对敌方战斗机进行干扰,电子干扰机与敌方战斗机距离为Rj,基本过程见图4。

图4 电子干扰机对敌方飞机干扰示意图
敌方雷达接收到目标回波信号功率Prs和干扰功率Prj分别为[1]:
(4)
(5)
公式(4)中,Pt为雷达发射功率,Gt为雷达天线增益,σ为目标雷达截面积,λ为雷达工作波长,Rt表示目标距雷达距离,Ls为敌雷达信号传输损耗因子;

雷达接收机输入端的干扰信号与目标回波信号功率比值为:
(6)
电子干扰机对敌方突防飞机干扰有效的基本条件是保证接收机输出功率信干比大于或等于检测单个脉冲信号所必需的功率信干比的Kj倍,其中Kj为压制系数,即[2]:
(7)
根据公式(6)和(7),可以得到电子干扰机的有效干扰距离Rt应满足:
(8)
此外,对应于电子干扰机的有效干扰距离Rt,具有干扰门限R0如下:
(9)
当Rt≥R0,干扰信号能压制雷达目标回波信号,此时敌方雷达无法发现己方目标,对应的空间区域就称之有源干扰压制区域,反之对方雷达将能够发现己方目标,此区域成为敌方雷达的暴露区。R0即为敌方雷达暴露区的最大半径。
(10)
公式(10)中,θ0.5为雷达天线波束宽度,θ为雷达天线与干扰机连线之间的夹角,θr0为雷达天线主瓣最大宽度。K为增益系数,且K≤1,不失一般性,K取值为0.1。
根据公式(9)和(10),得到敌方雷达暴露区的最大半径R0[4]:
(11)

基于第2.1节机群对突防飞机的截击模型,将公式(1)、(2)、(3)带入到公式(11),可知敌方雷达暴露区的最大半径R0如下:
(12)
3算例
针对本文第1节中所举的作战场景,机群对敌方突防飞机进行协作打击。根据电子干扰机干扰原理,设定预警机目标指示方法,可分析与评估机群多种作战情况下,电子干扰机对敌方突防战斗机造成的暴露区域及战斗机的突防区域。
3.1各单元的参数及相遇过程参数计算
根据各种参考文献,假设机群中预警机、电子干扰机、战斗机、空空导弹等各作战单元的具体参数见表1。

表1 敌我双方作战单元的参数指标
假设预警机对敌方突防飞机的探测距离为480千米,己方战斗机和电子干扰机前出80千米对预警机进行护航。预警机在480千米处发现目标,此时电子干扰机与敌方目标距离为400千米。己方预警机指挥战斗机与敌方突防飞机相向而行,距离80千米处敌方飞机进入己方战斗机的攻击范围。
结合表1所给的数据,根据公式(1),可以得出从发现目标到目标进入己方战斗机的打击区域时间为t1=87秒。根据飞行时间t1和公式(2),敌方战斗机飞行距离为R敌=74千米,己方战斗机飞行距离为R我=V我×t1=74千米。
经过t1时间后,敌方突防飞机已经在己方战斗机打击范围内,根据公式(3),此时敌方突防飞机距离己方电子干扰机距离为:Rj=74千米+150千米=224千米。
3.2预警机对电子干扰机目标指示情况下的干扰情况分析
在无预警机目标指示情况下,电子干扰机只能依靠电子侦察功能完成对敌方战斗机的测向,由于侦察测向精度较低,故电子干扰机的波束无法准确地对准目标,且由于波束宽度为30°[8],无法对敌方飞机准确实施空间上的瞄准干扰。


基于表1及上文参数,在有、无预警机目标指示的情况下,己方电子干扰机压制敌方战斗机雷达后,得出了敌方战斗机雷达的暴露区半径。见图5。

图5 敌机雷达暴露区的最大距离


图6 无预警机目标指示下的己方战斗机突防区域
有预警机目标指示情况下,己方电子干扰机采用小的波束宽度主瓣对敌方雷达进行干扰,敌方雷达在11°方位角上的暴露区最大半径R0为150千米,这意味着己方战斗机在以敌战斗机雷达天线法线为中心的(-11°,11°)方位区间内对敌方目标进行打击,均处于敌方雷达暴露区范围以外。在此情况下,战斗机的突防区域见图7所示中的斜线区域。
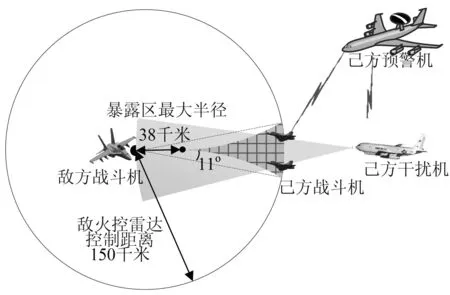
图7 有预警机目标指示下的己方战斗机突防区域
有预警机目标指示情况下,己方战斗机的突防范围有了很大的增加,相比无预警机指示情况,战斗机可从以敌战斗机雷达天线法线为中心的(-6°,-11°)、(6°, 11°)方位区间内对敌方目标进行打击,增加的战斗机突防区域见下图8中的网格状区域。

图8 己方战斗机突防区域增加范围
通过图8,可知预警机目标指示下,电子干扰机、战斗机的协同作战效能提升明显,一是提高了电子干扰机对敌方战斗机雷达的干扰效率,二是增大了战斗机的突防方位区域,实现了己方战斗机对敌方的“防区外攻击”。通过以上分析,可知同时整体保护了己方各作战单元的安全。
4结语
本文基于预警机、电子干扰机和战斗机组成的机群,在敌方突防飞机进行空中打击的情况下,分析与计算了己方电子干扰机的干扰作用范围。比较了有预警机目标指示和无预警机目标指示情况下,电子干扰机对敌方突防飞机进行干扰后形成的暴露区域及己方战斗机的突防区域。
结论说明了预警机通过目标指示给电子干扰机,可以提高电子干扰机的干扰效能,同时可以增加己方战斗机的突防区域,有效提升了己方作战单元的安全。相对于无预警机的作战情况,预警机能够有效组织电子干扰机、战斗机形成机群作战体系,相应的机群体系作战具有效能高、安全性好等优势。相应的理论模型、研究结论可为预警机、电子干扰机、战斗机等机群的作战过程及机群各单元的空中站位布设、任务规划等提供一定的理论方法依据。
参考文献:
[1]承德保. 现代雷达反对抗技术[M]. 北京:航空工业出版社, 2002.
[2]贺卫东, 王建涛, 栗苹, 闫晓鹏. 针对警戒雷达的机载远距离支援干扰动态压制区域研究[J]. 测试技术学报. 2011, 25(6): 489-493.
[3]王国玉, 汪连栋, 王国良等. 雷达电子战系统数学仿真与评估[M]. 北京:国防工业出版社, 2004.
[4]平殿发, 张伟, 张韫. 远距离干扰模式下电子战飞机有效配置区域的确定[J]. 火力与指挥控制.2014, 39(7): 144-151.
[5]曾茂生, 修继信. 多波束干扰机最小干扰距离缩比试验方法探讨[J].舰船电子对抗. 2002,25(1):4-6.[6]陈琨. 美国空军的E-3AWACS预警机. 国防技术基础. 2002, (6):43-45.
[7]冯军. 美新一代主力制空战斗机F-22简介. 江苏航空. 2000, (1):17-18.
[8]杨曼, 沈阳. 美军空中电子攻击体系研究. 电子信息对抗技术.2010,25(4):12-16.
Analysis and Evaluation of Aircraft Group with AWACS Cooperated Combat on Attacking Area
CUI Ji-xian1,ZHANG Zhi-hu2
(1. China Academy of Electronics and Information Technology, Beijing 100041;2. Southwest China Electronic Equipment Research Institute,Sichuan Chengdu 610036)
Abstract:It is extremely desired to know how aircraft group that consist of AWACS, jamming aircrafts and fighters could cooperate in air-combat. In this paper, the model of air-volley and model of jamming area is built. Along with analysis of the difference of the result of jamming whether there is AWACS or not and then solve the attacking area under systematic support. The conclusion is that under the guidance from AWACS, with opponents radar jammed by our jamming aircraft, the attacking area of fighter is significantly expanded. The procedure of the analysis shall provide instruction for aircraft group's combat program design、space location and task planning.
Key words:Aircraft Group warfare, AWACS, Jamming Aircraft, Attacking area
doi:10.3969/j.issn.1673-5692.2016.03.016
收稿日期:2016-04-09
修订日期:2016-06-01
作者简介

崔继先(1977—)男,湖北恩施人,工程师,主要研究方向为预警机任务系统总体;
E-mail: cuijixian@163.com
张志虎(1978—)男,四川阆中人,高级工程师,主要研究方向为电子侦察、电子干扰系统。
猜你喜欢
小哥白尼(军事科学)(2021年5期)2021-08-30
航空世界(2020年5期)2020-01-11
文萃报·周二版(2018年42期)2018-10-21
指挥控制与仿真(2018年3期)2018-06-11
舰船电子对抗(2014年3期)2014-10-13
舰船科学技术(2013年12期)2013-08-15
共产党员(辽宁)(2010年6期)2010-09-06
小哥白尼·军事科学画报(2009年4期)2009-05-11