
一种改进的航空遥感影像阴影自动检测方法
2016-07-15 05:10位明露詹总谦
测绘通报 2016年6期
位明露,詹总谦
(武汉大学测绘学院,湖北 武汉 430079)
一种改进的航空遥感影像阴影自动检测方法
位明露,詹总谦
(武汉大学测绘学院,湖北 武汉 430079)
摘要:针对航空遥感影像阴影检测中与阴影具有相似特性的绿地、亮度较暗的非阴影区域和亮度较高的阴影区域容易出现错检、漏检的问题,结合HSV变换和区域生长原理,提出了一种改进的阴影检测方法。首先在HSV色彩空间通过图像增强构建了一种新的阴影指数,并引入了双阈值法,剔除了植被和亮度较暗的非阴影区域的影响;接着通过区域生长得到了包含较亮阴影的完整阴影区域。经过对比试验表明,该方法能够有效地提取较亮阴影,对绿地和较暗的非阴影区具有较好的区分能力,可以有效提高检测精度。
关键词:阴影指数;阴影检测;HSV变换;区域生长;伽马变换
航空遥感影像阴影检测对影像解译、地物识别、边缘提取和影像配准等具有重大意义。目前,国内外遥感影像阴影检测方法主要包括基于模型的方法[1]和基于阴影性质的方法两大类。基于模型的方法依据遮挡物体的几何形状、DSM、太阳入射角和传感器等参数,具有较大局限性。基于阴影性质的方法主要依据阴影区域与非阴影区域的差别提取阴影,首先由Jiang等根据阴影区域的亮度比非阴影区域低的性质提出[2]。Funka等提出一种根据光谱性质检测阴影的算法[3];Highnam等提出基于直方图阈值的阴影检测算法[4];Elemadmia等提出基于同态滤波的阴影检测算法[5];Salvador等提出基于色彩不变性的阴影检测算法[6]。王树根等提出基于整体变分模型的影像检测算法[7];杨俊等提出一种S和I分量归一化差值与I分量双阈值检测阴影的算法[8];夏怀英等提出混合灰度共生矩阵能量、熵、对比度和逆差矩4种统计特征量的混合模型阴影检测方法[9];方菊芹等提出结合局部分类水平集与颜色特征的阴影检测方法[10];刘辉提出基于主成分变换和HIS模型的阴影检测方法[11];赵显富等将HSV空间检测结果与C1C2C3空间的C3分量和RGB空间的B分量双阈值检测结果进行与运算达到较好的阴影检测效果[12]。
上述方法在特定领域均得到了很好的应用,但是由于阴影成像机理的复杂性及阴影纹理的复杂性,尚无一种通用的检测方法适用于所有影像。特别是对亮度较高的阴影,以及与阴影具有相似特性的绿地、亮度较暗的非阴影区域,易出现错检或漏检,检测精度较低。针对这一问题,本文在HSV色彩空间通过图像增强构建一种新的阴影指数,并引入双阈值法,剔除植被和亮度较暗的非阴影区域的影响;同时,通过区域生长得到包含亮阴影的完整阴影区域,有效提高了检测精度。
一、阴影检测模型构建
与非阴影区域相比,阴影区域具有亮度值更低、饱和度更高、色调值更大[13]的特点。这些特点体现在影像的HSV色彩空间,因而将原始影像经过HSV变换由RGB转换到HSV空间。
1. 图像增强
影像阴影区域与非阴影区域在HSV空间具备亮度、饱和度和色调差异,为凸显这些差异,有必要对H、S、V分量进行对比度增强处理。伽马变换在对比度操作中具有重大作用。其变换函数[14]为
g=cfγ
(1)
式中,c、γ为正常数(一般取c=1);f为输入灰度值;g为输出灰度值。γ>1时,该变换将较宽范围的暗色输入值映射为较窄范围的输出值,较窄范围的高灰度级输入值映射为较宽范围的输出值;γ<1时,与之相反;γ=1时,式(1)简化成恒等变换。
2. 阴影检测模型
结合高饱和度特征S分量和低亮度特征V分量,构建阴影指数为
(2)

经过伽马变换后,S分量和V分量的对比度均得到增强,S分量中阴影区域的饱和度相比非阴影区域变得更高,V分量中阴影区域的亮度相比非阴影区域变得更低,使得阴影指数SI具有更高的敏感度。
同样对高色调特征H分量按式(1)进行伽马变换(本文选取γ1=γ2=γ3=1.1)得到式(3),其中fH和gH分别为H分量在伽马变换前后的灰度值。
(3)
理论分析和大量试验表明,阴影指数SI能有效区分所有暗阴影和较亮的阴影,但包含部分较暗的非阴影区和植被;gH能有效区分绝大部分暗阴影和较暗的非阴影区、植被,但包含较亮的阴影和部分其他非阴影区。将两者结果进行与运算即可得到剔除植被和较暗非阴影区的绝大部分阴影(不包含较亮的阴影)。因而,采用双阈值法按式(4)的组合方式能得到较理想的阴影检测结果为
(4)
式中,SI(i,j)、gH(i,j)分别为像素(i,j)对应的阴影指数和H分量伽马变换值;T_SI、T_gH分别为阴影指数和H分量伽马变换值的阈值。
二、区域生长
1. 区域生长原理
种子区域生长(SRG)是一种图像分割方法[15],由初始种子点集A1,A2,…,An(Ai(i=1,2,…,n)可为单个或多个像素)扩散开来,每一步生长纳入一个像素至上述集合。考虑Ai集合经m步生长,T表示所有尚未分配的像素(至少与种子集合的一边相邻)

(5)

(6)
式中,g(x)表示像素x的灰度值。当N(x)满足两个或两个以上Ai时,取δ(x)最小值对应的Ai。同时,可以按式(7)定义边界像素集合B,令z∈T,并添加至Ai(z)。

(7)
此时第m+1步生长结束。不断重复上述过程直至所有像素得到分配。整个过程起始于每个种子集合Ai,按式(6)和式(7)的迭代终止条件结束。
由于阴影边界的复杂性,且考虑阴影本身亮度存在的不一致性,本文选取灰度和梯度两个检测量为生长终止条件。灰度限制条件如式(6),梯度采用sobel算子[14]
(8)

2. 阴影检测流程
不同于其他阴影检测方法,本文根据构建的阴影指数提取阴影后,利用区域生长对自动识别的阴影种子点进行扩充,而不是简单的形态学处理。区域生长结合了阴影自身的灰度和纹理特性,能有理有据地识别阴影,尤其对阴影边界和亮度较高的阴影具有更好的效果。具体检测流程如图1所示。

图1 阴影检测流程
1) 将影像从RGB色彩空间转换到HSV色彩空间。
2) 分别对H、S、V分量按式(1)进行伽马变换,并利用S、V按式(2)构建阴影指数SI。
3) 根据式(4)采用双阈值法提取初步的阴影Sd,并进行标记。
4) 自动搜索Sd中大于一定面积的区域,以其中心的若干像素为种子区域,以式(6)和式(8)中灰度和梯度为迭代限制条件进行区域生长,得到最终的阴影区域Sd′。
三、试验结果与分析
本文采用上述方法对多幅具有不同程度阴影的航空遥感影像进行试验,如图 2所示。测试平台为Intel(R) Core(TM) i7-3770 3.4 GHz,4.0 GB内存,Windows 7操作系统。为便于观察,阴影检测结果用白色标记,且与文献[12]使用HSV空间和双阈值的方法进行对比分析(为增强对比,本文对阴影结果未采用形态学处理)如图 3所示。
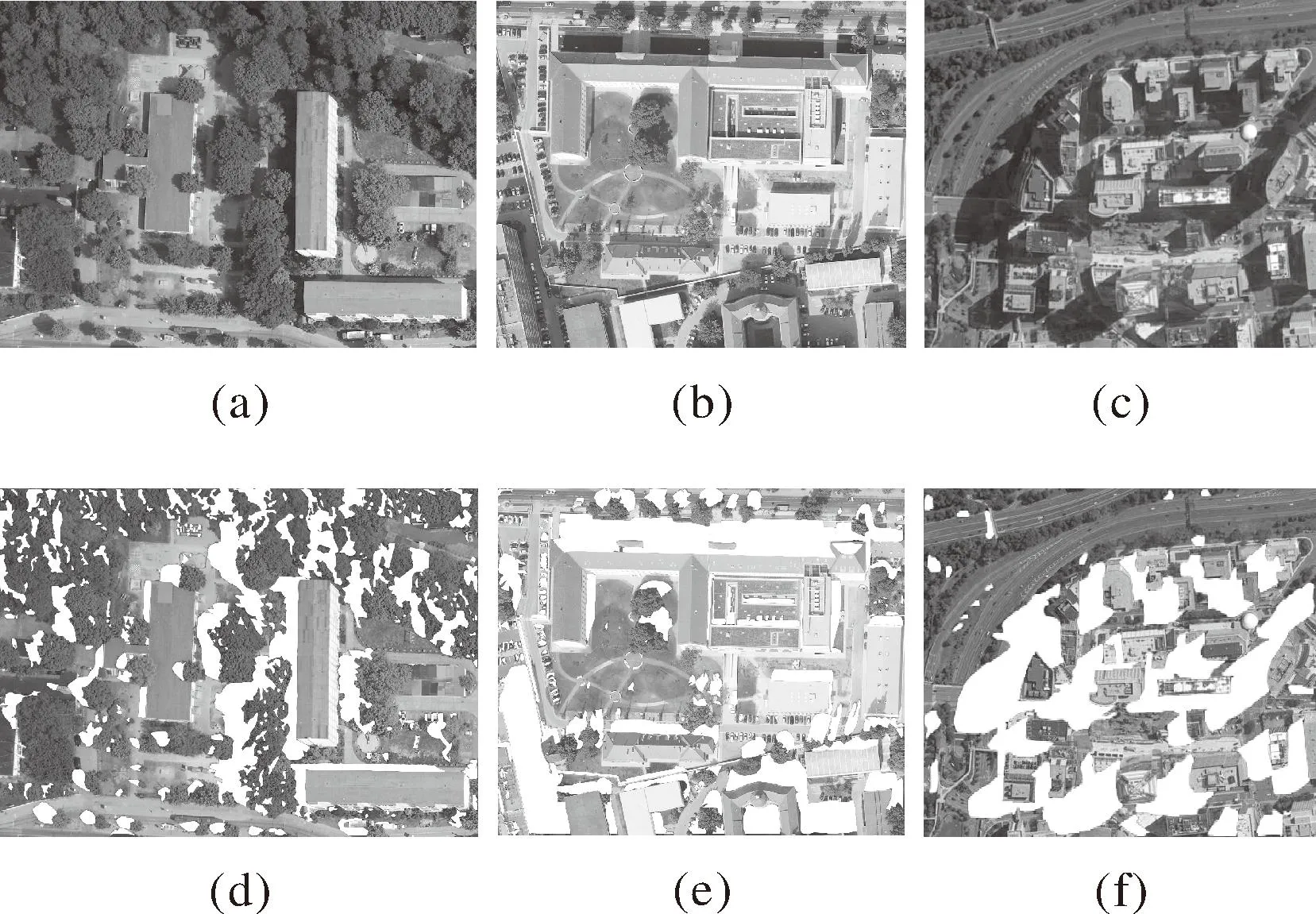
图2 原始影像

图3 阴影检测效果
图 2(a)—图2(c)分别代表大面积绿地、包含亮度较大的阴影(图(b)上部分白色道路)和密集建筑物的原始影像。图 3显示了对图 2中3幅原始影像分别进行阴影检测的结果。其中,(a1)、(b1)、(c1)为文献[12]中方法所得结果;(a2)、(b2)、(c2)为本文所构建的阴影指数SI与H分量双阈值所得结果;(a3)、(b3)、(c3)表示对双阈值结果进行区域生长得到的最终检测结果。
对比分析(a1)、(a2)和(a3)发现,两种方法都能正确检测到绝大部分建筑阴影和绿地阴影。但文献[12]存在部分错检和漏检现象,尤其是绿地阴影噪声较多,建筑物阴影提取不完全。本文的双阈值法能更有效地检测绿地,但是存在少许检测不完全的现象,右上角的大片植被和右下方的建筑物阴影比较稀疏,不符合实际阴影状况。(a3)显示的区域生长结果较好地扩充了阴影,达到了较为理想的效果。
(b1)、(b2)和(b3)显示的结果表明,文献[12]对亮度较高的阴影(最上部分白色道路)不具备辨别能力,且存在错检(中心绿地)和漏检现象(右下角建筑物)。本文双阈值法较好地解决了绿地错检和建筑物漏检问题,区域生长完善了检测不完全的阴影区域((b3)最上部分白色道路得到检测),得到了较理想的检测结果。
对包含密集建筑物的影像,(c1)基本检测到所有建筑物阴影,但错误地提取了绿地。本文方法所得(c2)、(c3)不仅较完整地提取了复杂建筑物的阴影,而且剔除了绿地的影响。
为了更加客观地分析结果,采用文献[16]中提出的正确检测率DR和漏检率FR两个指标对检测结果进行定量分析。指标定义为
(9)
式中,TN表示正确识别的阴影像素数;FN表示非阴影区域误识别为阴影区域的像素数;FS表示漏检的阴影区域像素数。
统计阴影检测数据证实了本文采用的双阈值和区域生长方法相比文献[12]中方法具有更高的检测精度,统计结果见表 1。
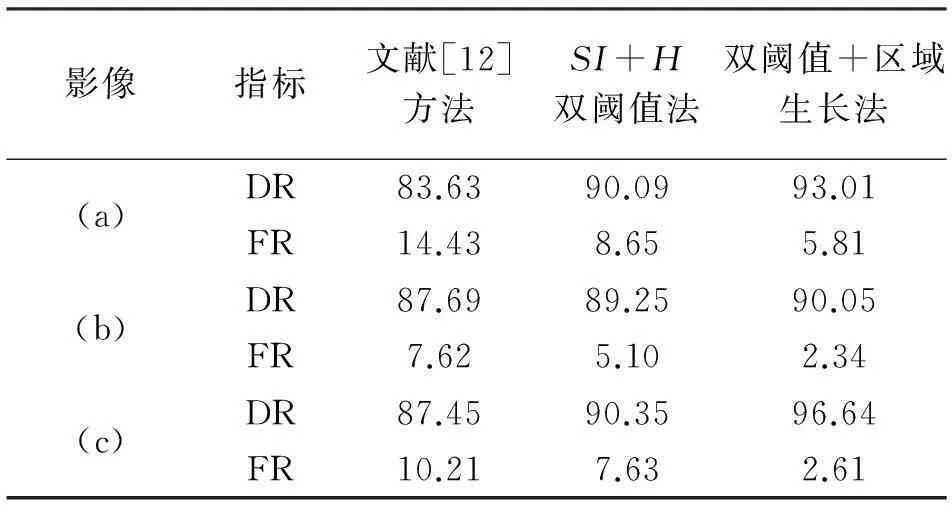
表1 阴影检测结果统计数据 (%)
四、结束语
本文根据阴影的特性选用HSV空间分量构建阴影指数,同时引入图像增强提升各分量的对比度,使阴影指数具有较高的敏感度,采用双阈值法提高了检测精度。区域生长算法对阴影区域进行迭代生长,进一步完善了阴影检测结果。试验结果表明,本文方法能够有效剔除绿地影响,对较亮的阴影区和较暗的非阴影区均有较好的区分能力。本文采用自动搜索大于一定面积的初始阴影区域中心为种子点,自动化程度较高。需要说明的是,区域生长的结果依赖于初始种子点的选取。同时,由于双阈值法设置了阴影指数SI和H分量的阈值,区域生长设定了灰度和梯度两个检测量及其相应的阈值,阈值的选取需要依据影像本身的特性基于统计求取,其过程不够简便,因而阈值的快速自动获取是下一步的研究内容。
参考文献:
[1]FINLAYSON G D,HORDLEY S D,DREW M S. Removing Shadows from Images[J].Lecture Notes in Computer Science,2002,2535:129-132.
[2]JIANG C,WARD M O. Shadow Identification[C]∥ Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Champaign:IEEE,1992.
[3]FUNKA-LEA G,BAJSCY R. Combining Color and Geometry for the Active, Visual Recognition of Shadows[C]∥ Proceedings of Fifth International Conference on Computer Vision.Cambridge:IEEE,1995.
[4]HIGHNAM R,BRADY M. Model-based Image Enhancement of Far Infrared Images[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(4):410-415.
[5]ETEMADNIA H,ALSHARIF M R. Automatic Image Shadow Identification Using LPF in Homomorphic Processing System[C]∥Proceedings of VII Digital Image Computing:Techniques and Applications.Sydney: Committee of DICTA,2003.
[6]SALVADOR E, CAVALLARO A,EBRAHIMI T.Cast Shadow Segmentation Using Invariant Color Features[J]. Computer Vision and Image Understanding, 2004,95(2):238-259.
[7]王树根,王军利,王爱萍.基于整体变分模型的影像阴影检测算法研究[J].武汉大学学报(信息科学版),2006,31 (8):663-666.
[8]杨俊,赵忠明,杨键.一种高分辨率遥感影像阴影去除方法[J].武汉大学学报(信息科学版),2008,33(1):20-33.
[9]夏怀英,郭平.基于统计混合模型的遥感影像阴影检测[J].遥感学报,2011,15(4):132-145.
[10]方菊芹,陈帆,和红杰,等.结合局部分类水平集与颜色特征的遥感影像阴影检测[J]. 自动化学报,2014,40(6):1156-1165.
[11]刘辉.基于改进阴影指数的福州市主城区建筑容积率提取[J]. 武汉大学学报(信息科学版),2014,39(10):1241-1247.
[12]赵显富,胡晓雯,赵轩. 一种基于彩色模型的遥感影像阴影检测方法[J].测绘通报,2014(5):20-22.
[13]HUANG J F, XIE W X, TANG L. Detection and Compensation for Shadows in Colored Urban Aerial Images[J].The 5th World Congress on Intelligent Control and Automation,2004,4:3098-3100.
[14]冈萨雷斯.数字图像处理[M].3版.北京:电子工业出版社,2013.
[15]ADAMS R, BISCHOF L. Seeded Region Growing[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1994,16(6):641-647.
[16]MARTEL B N,SACCHARINE A. Moving Cast Shadow Detection from a Gaussian Mixture Shadow Model[J]. IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2005,2:643-648.
An Improved Method of Automatic Shadow Detection for AerialRemoteSensingImages
WEI Minglu, ZHAN Zongqian
收稿日期:2015-07-03
基金项目:国家科技支撑计划(2012BAJ23B03);国家自然科学基金(41101418;41071292)
作者简介:位明露(1991—),女,硕士,研究方向为摄影测量与计算机视觉。E-mail:minglulwei@whu.edn.cn
中图分类号:P23
文献标识码:B
文章编号:0494-0911(2016)06-0014-04
引文格式: 位明露,詹总谦. 一种改进的航空遥感影像阴影自动检测方法[J].测绘通报,2016(6):14-17.DOI:10.13474/j.cnki.11-2246.2016.0180.
