基于多目标的雷达组网传感器资源管理算法*
2016-07-12 08:23王成伟薛安克
火力与指挥控制 2016年5期
王成伟,陈 霄,薛安克
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州 310018)
基于多目标的雷达组网传感器资源管理算法*
王成伟,陈霄,薛安克
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,杭州310018)
摘要:在雷达组网系统的多目标跟踪过程中,当目标数量过多时,由于传感器资源不足,无法使用传统传感器的管理方法进行资源分配,且运算时间过长,不满足工程实际需求。针对以上问题,提出了一种新的多传感器多目标跟踪任务快速分配算法,该算法将跟踪目标个数和跟踪目标精度作为优化目标,首先按照设定的分配准则对传感器进行一次分配,最大化跟踪目标个数;然后利用一种基于传感器排序的启发式传感器分配方法进行二次分配,通过控制跟踪目标的协方差水平,使目标的跟踪精度尽量接近期望值。仿真结果表明,该算法能够在较短的时间内对多传感器进行有效快速地分配,既跟踪了更多的目标,又达到了期望目标的跟踪精度,并且在一定程度上控制资源消耗,减少系统的总耗能。
关键词:协方差控制,传感器管理,信息增益,快速启发式
0 引言
防空预警体系多采用雷达组网系统,充分利用多个传感器组合跟踪的优势,建立目标的综合跟踪系统[1]。传感器资源管理方法通过对多个传感器的跟踪任务合理分配,不仅可以较好地完成目标跟踪任务,而且可以节约雷达资源,如线性规划方法[2]、基于信息熵值[3]、目标威胁度的管理方法[4]和协方差的控制技术[5]等。在此基础上,文献[6]提出了基于协方差控制的多传感器分配方案。
尽管这些研究取得了很多成果,但是目前已有的大部分多传感器管理算法都是以目标的跟踪精度或类似原则为分配准则。而通常在实际战场中,目标是否能被跟踪是首要需求。此外,大部分算法假设传感器的资源是无限的,即每个传感器的资源可以满足任何一种分配方案的需求。而在实际环境中,当存在大量目标时,有限的雷达资源常无法满足这一假设。更重要的是,当雷达和目标数目较多时,资源管理算法运算速度也是需要关注的重点内容。针对以上问题,本文根据战场实际需求,提出了一种雷达组网多目标跟踪任务资源管理算法,该算法以目标跟踪数目和目标跟踪精度为优化目标,在雷达资源约束下,实现基于多个目标的多传感器跟踪任务的快速分配。
1 多目标多传感器跟踪任务快速分配算法数学模型
在雷达资源有限的情况下,资源分配的任务是在满足传感器资源约束的前提下,保证每个目标至少有一个雷达进行跟踪,并满足目标的期望跟踪精度。为了便于说明问题,本文将雷达资源约束简化为雷达最多可以跟踪的目标个数。基于以上分析,本文建立了多传感器多目标跟踪任务资源分配数学模型如下:
假设组网系统中包含M个雷达,需跟踪N个目标,则目标函数为:

约束条件为:

其中n表示被雷达跟踪的目标个数,Pj(k|k)表示k时刻目标j的滤波协方差,Psjk|k)表示k时刻目标j的期望协方差,X为最终的雷达分配矩阵,X(i,j)=1表示分配雷达i跟踪目标j,X(i,j)=0表示未分配雷达i跟踪目标j,RadarLarge为雷达跟踪能力矩阵,其中RadarLarge=VRmaxi表示雷达i可以跟踪的最多目标个数。
2 算法实现过程
本算法通过两个传感器资源分配过程依次实现两个优化目标,具体过程如下。
2.1雷达多目标跟踪任务的第1次分配
根据实际需求,本算法提炼出3个分配规则,依次基于各个目标,对传感器资源进行第1次分配,将每个目标仅分配一个雷达进行跟踪,从而实现第1个优化目标,最大化可以跟踪的目标个数。3个规则分别为:①优先分配优先级较高的目标;②只让一个目标被一个雷达跟踪;③优先使用跟踪能力最弱的雷达。具体的分配步骤如下:
Step1:将目标按优先级从高到低排序为矩阵Target,建立雷达可用资源矩阵VRadar,其中初始VRada(ri)=VRmaxi,i=1,....,M。
Step2:令j=1,在矩阵Target中选择目标Target (j),在所有雷达中挑选可跟踪目标j的雷达,并按当前最多可跟踪目标个数从低到高对雷达进行排序,选择第1个雷达分配给目标j,同时更新雷达可用资源矩阵VRadar,将对应可跟踪目标个数减1。
Step3:令j=j+1,重复步骤2,直到所有目标均被分配一个雷达为止,从而完成雷达的第1次分配过程。将最后分配结果存到矩阵J1中。
2.2雷达多目标跟踪任务的第2次分配
由于经过第1次分配过程后,部分雷达还有剩余能源没有被利用,而且只经过1次分配的雷达也无法保证能够满足目标的期望跟踪精度。因此,本算法按照目标优先级从高到低的顺序,对能够跟踪到该目标的所有雷达进行第2次分配,从而完成第2个优化目标。为加快算法运行效率,本文采用了基于信息增益的快速启发式算法[7],一旦该目标的期望协方差Ps(jk|k)与滤波协方差P(jk|k)差值的最小值大于零,则把此时分配的方案赋值给该目标,而不是遍历所有可能的传感器组合情况。在分配之前,首先计算每个传感器的信息增益Ji以及每个目标的期望信息增益Jd,其具体公式为:

H,R分别表示传感器的量测矩阵和量测噪声协方差。Pd(k)表示期望协方差,P-1(k|k-1)表示预测协方差。
具体分配步骤如下:令j=1,
Step1:离线计算每个雷达的信息增益Ji。
Step2:在雷达中挑选经第1次分配后还可跟踪目标Target(j)的雷达,和经2.1节后已分配雷达J1 (Target(j))一起组成可选择雷达矩阵SRadar2(Target(j));
Step3:计算SRadar2(Target(j))雷达的个数,若个数小于或等于设定可以跟踪目标Target(j)的最小个数,则直接采用所有的雷达跟踪目标Target (j),然后跳转到Step6。否则首先计算第j个目标的期望信息增益Jd,然后将SRadar2(Target(j))中所有的雷达分别于期望信息增益做绝对值求迹度量,并根据度量结果将传感器由大到小进行排序。即:

Step4:令p=1,在I中挑选第p个和之前所有的雷达进行序贯滤波,并判断其滤波协方差P(jk|k)与目标的期望协方差P(sjk|k)的差值是否满足需求,如果满足,则确定该组合为对第j个目标的最终雷达分配结果,否则,令p=p+1,直到满足条件为止。
Step5:根据Step4的结果,更新雷达可用资源矩阵VRadar,便于下一个目标的分配任务。
Step6:判断j是否等于N,若不等于N,j=j+1,从Step2继续循环,直到就j=N,完成第2次的分配。
3 仿真测试
假定某雷达组网系统使用10个雷达跟踪4个匀速运动目标。每个雷达最多可跟踪4个目标。目标的优先级分别为[0 1 2 3],每个目标所需的最小雷达跟踪数为[1 2 2 3]。其中,目标1~目标3的过程噪声协方差均为diag[1,1,1],目标4的过程噪声协方差为diag[0.1,0.1,0.1],过程噪声和量测噪声均服从零均值的高斯白噪声。4个目标的期望协方差随时间变化,如表1所示。
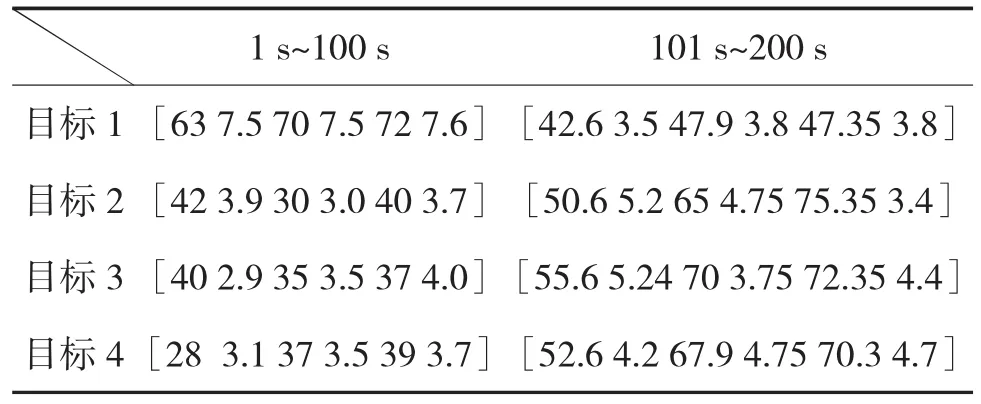
表1 各个目标的期望协方差
采样周期为1 s,仿真时间为200 s。为证明本文算法有效性,分别采用基于协方差控制的传感器管理分配方案和本文提出的传感器管理分配方案对场景中的雷达跟踪任务进行分配,得到的雷达分配结果如图1和图2所示。


图1 采用协方差控制的传感器分配算法得到的雷达分配结果

图2 采用本文算法得到的雷达分配结果
为了进一步比较传感器分配方案的管理效果,以目标4为例,采用这两种分配方案对目标进行跟踪后的目标位置协方差如图3和图4所示。

图3 采用协方差控制的传感器资源管理分配算法得到目标4的状态变量协方差
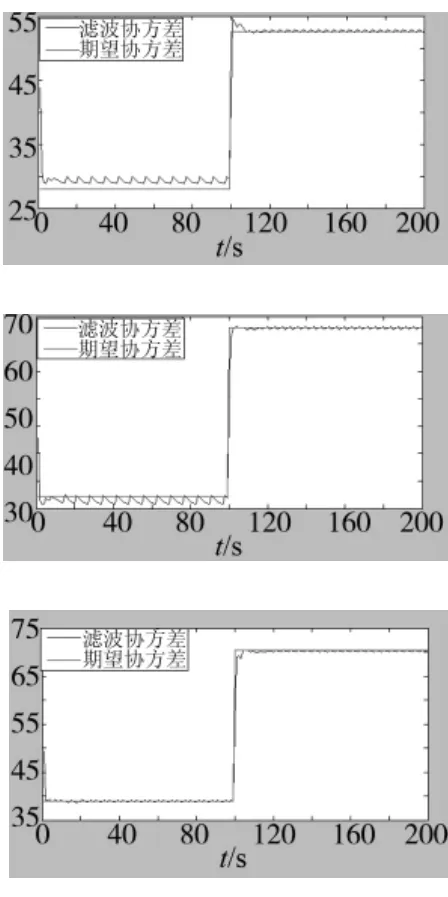
图4 采用本文算法得到的目标4的各状态矢量的期望协方差和滤波协方差
从图1至图4中可以发现,在同一采样时刻,采用本文提出的算法对传感器进行管理时,用于跟踪同一个目标的雷达数目少于基于协方差的控制管理方案,因此,在很大程度上降低了雷达资源的消耗。同时,尽管采用了较少的雷达进行跟踪,从目标的位置协方差结果中可以得知,这样的分配方案同样可以满足目标的期望跟踪精度。此外,为进一步显示算法运行时间的优势,本文在表2中列出了在不同个数目标时,两种算法的运行时间。

表2 两种算法运行时间
从表2可知,随着目标数目的增加,两种算法的运行时间均开始增加,但本算法运行时间增长速度远小于基于协方差控制算法运行时间,两者的时间比值也逐渐增加,当目标增加到20个时,本算法所运行时间仅仅为协方差控制算法的1/5,表明本算法的计算量小,时效性较强。
4 结论
在目标数量过多时,传统的雷达资源分配方法的分配结果无法保证满足传感器资源约束。而且,当传感器和目标大量增多时,由于计算量太大,这种资源管理方法无法应用于实际系统中。本文提出了一种新的多传感器多目标跟踪任务快速分配算法,通过两次传感器分配过程,在传感器资源约束下,使整个雷达组网系统可以跟踪更多的目标,同时使目标的跟踪精度尽量接近期望值。算法在分配过程中均采用了启发式分配方法,避免了可能传感器分配组合的遍历搜索,从而大量节省了运算时间。
参考文献:
[1]WALTZ E,LINAS J. Multi-sensor data fusion[M]. MA:Artech House,1990.
[2]NASH J M. Optimal allocation of tracking resources[C]// Proceeding of IEEE Conference on Decision and Control,1977.
[3]胡俊波,吴学智.一种基于DGDL传感器管理优化策略[J].计算机测量与控制,2005,13(10):1155-1157.
[4]崔博鑫,许蕴山,夏海宝,等.基于任务控制的动态多传感器管理方案[J].系统工程与电子技术,2012,34(12):2473-2478.
[5]KALANDROS M,PAO L Y. Covariance control for multi-sensor systems[J]. IEEE Trans. on AES,2002,38(4):1138-1157.
[6]周文辉,胡卫东,余安喜,等.基于协方差控制的集中式传感器分配算法研究[J].电子学报,2003,31(12A):2158-2162.
[7]徐松柏.基于跟踪反馈的相控阵雷达宏微观资源管理技术研究[D].杭州:杭州电子科技大学,2014.
New Multi- sensor Resource Management Algorithm of Radar Networking Based on Multi- targets Tracking
WANG Cheng-wei,CHEN Xiao,XUE An-ke
(Fundamental Science on Communication Information Transmission and Fusion Technology Laboratory,Hangzhou Dianzi University,Hangzhou 310018,China)
Abstract:For the multi-sensor in the radar networking management in the process of multi-targets tracking task problem,when a lot of targets appear,as for the lack of sensor resources,it is unable to use traditional sensor management method. In the meanwhile,the operation time is too long to demand of practical engineering. To solve above problems,this paper presents a new radar networking multisensor fast tracking task allocation algorithm. This algorithm regards the numbers of tracking targets and tracking accuracy as the optimization goal,the first step in the decision-making to ensure maximum number of radar tracking target. Secondly,for the advantages of covariance control and information gain,using multi-targets tracking task fast allocation heuristics method is made decision. Make the target tracking accuracy close to expectations as far as possible. The simulation results show that the algorithm can both track more targets and track multi -targets with accuracy and timeliness while controlling resource consumption and reducing the total energy consumption of the system.
Key words:covariance control,sensor-management,information gain,fast heuristics method
中图分类号:TN953
文献标识码:A
文章编号:1002-0640(2016)05-0089-04
收稿日期:2015-04-19修回日期:2015-05-17
*基金项目:国家自然科学基金(61104049);国家自然科学基金重点资助项目(61333009)
作者简介:王成伟(1990-),男,山东泰安人,研究生。研究方向:传感器管理。