多颜色模型分割自学习k-NN设备状态识别方法
2016-07-11 12:13郭雪梅刘桂雄广东省自动化研究所广东广州50070华南理工大学机械与汽车工程学院广东广州5064
中国测试 2016年4期
郭雪梅,刘桂雄(.广东省自动化研究所,广东 广州50070;.华南理工大学机械与汽车工程学院,广东 广州5064)
多颜色模型分割自学习k-NN设备状态识别方法
郭雪梅1,刘桂雄2
(1.广东省自动化研究所,广东广州510070;2.华南理工大学机械与汽车工程学院,广东广州510641)
摘要:在浪涌测试中,由于每次识别对象不同,直接采用特征匹配每次测试前需要根据受试设备重新训练样本。先根据图像中高亮度点、白光所占比例,决策用于图像分割的颜色模型(L*a*b*、HSL、HSV),实现自适应分割;其次,提出自学习k-NN算法,以像素数n、偏心率e、密实度比r、欧拉数E为样本S特征向量X,构建数据集T0,以欧氏距离D实现样本分类;若样本置信度为k,加入预备数据集Tz′中,当Tz′满足条件,则扩充数据集Tz形成数据集Tz+1。结果证明:算法在9组各类样本(共21600帧图像)识别中,准确度可达98.65%;并自学习扩充5组样本,距离矩阵变化较小,可见算法学习效率、学习准确度较高。
关键词:多颜色模型;k近邻算法;自学习;浪涌测试
0 引 言
浪涌测试是CE认证的强制认证项目之一,标准IEC 61000-4-5——2005中将受试设备认为黑匣子,根据设备面板指示灯、显示屏的状态,将抗扰度测试结果分为:工作正常、功能暂时降低或丧失、功能永久性丧失等3种情况[1]。目前浪涌测试常采用人工目视判断或图像特征匹配识别;人工目视判断存在工作量大、效率低、结果判定主观性强、不可溯源等问题[2];图像特征匹配识别简单方便,但每次测试前需要根据受试设备重新训练样本[3],在测试现场存在振动、阴影等干扰的情况下,识别效果难以保证[4]。Amato Giuseppe[5]基于k-NN的图像分类算法,利用标准空间特性分类,算法的效果与分类准确度得到显著提升。华才健[6]采用形状匹配算法与亚像素边缘轮廓测量,实现工件自动判别和定量检测。陈耿新[7]研究一种基于可信的kNN算法,提高分类算法性能。在不同颜色空间中进行图像处理也是一个趋势,尤政[8]基于RGB、HSV颜色空间转换的实现交通图像增强;SOLEIMANIZADEH S[9]提出一种基于RGB、HSV、YCbCr 3种颜色模型直方图的目标识别方法,能够有效识别出被遮挡目标。CHERNOV V[10]提出一种RGB至HSV的快速转换方法。若依据不同环境、识别对象,采用相应颜色模型进行阈值分割,可以在少量提升计算开销的情况下,提高识别准确率。
1 多颜色模型阈值分割方法
1.1 L*a*b*、HSL、HSV颜色模型
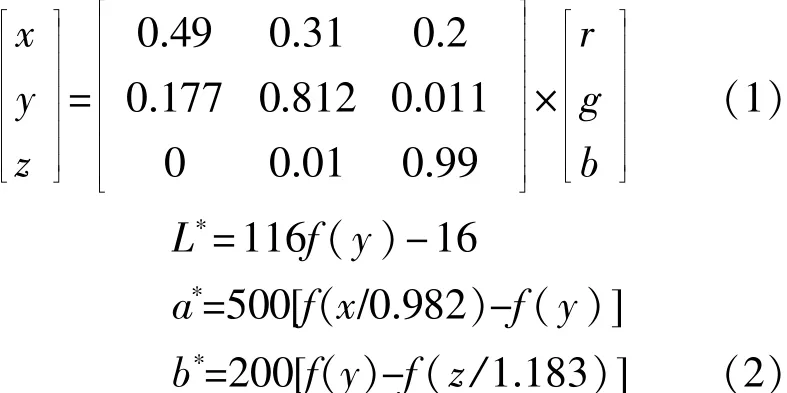
常见的RGB空间将所有的颜色看作是三基色的组合,但3个分量之间存在很强的相关性,不适于直接用于基于3个分量独立运算的图像分割。L*a*b*颜色模型中光照亮度L*线性度最好。从RGB颜色模型到CIE L*a*b*颜色模型,需要先转换为CIE XYZ颜色模型[11],公式为

但在浪涌测试中,存在多种颜色状态灯、灯具识别时白光占优的情况,其性能较差。设m=MAX(r,g,b)、n=MIN(r,g,b),则从RGB颜色模型到HSL颜色模型的转换[12]为

从RGB颜色模型到HSV颜色模型的转换为

由式(4)、式(5)可见,在HSL颜色模型,当且仅当r=g=b=255时,l=255,各种有色光的最大亮度lmax∈[128,255),适合用于白光占比多的情况;在HSV颜色模型中,各种有色光的最大明度νmax=255,适合用于分辨中低亮度下的不同色灯。
1.2 多颜色模型自适应阈值分割
以高亮度点所占比例、白光所占比例决策颜色模型,进行阈值分割,设高亮阈值Tb、高亮比例阈值Rb、白光比例阈值Rw,图像中满足m>Tb、n>Tb像素个数分别为Nm、Nn,图像Ω0总像素值NΩ,则选用不同颜色模型进行阈值分割的规则如图1所示。
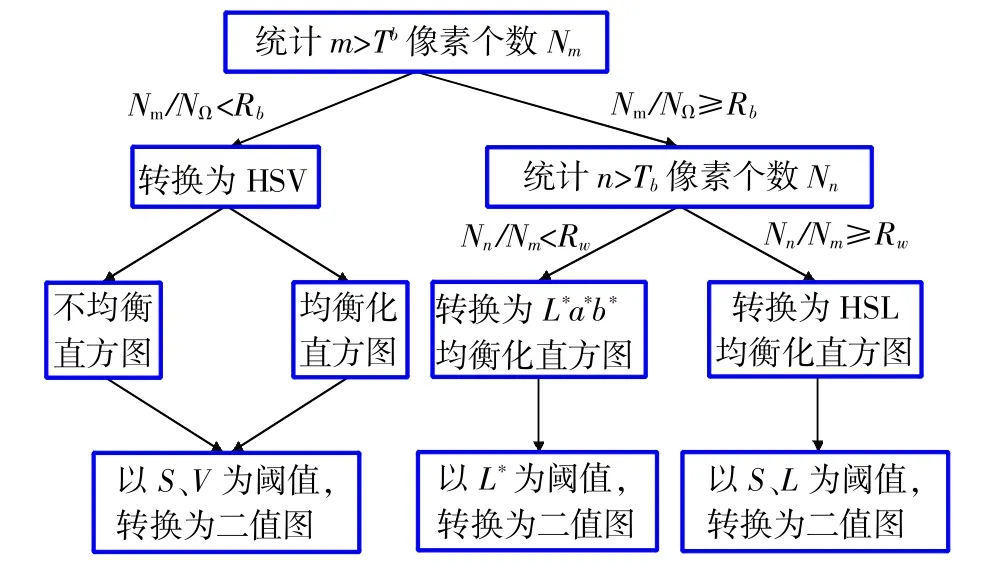
图1 多颜色模型阈值分割方法
设阈值切割后获得二值图像Ω1,点p(x,y)是为Ω1中坐标(x,y,z)点,形态学运算结构为F,结构元素F平移(x,y)后得F(x,y)[13]。则腐蚀运算为

膨胀运算为

先膨胀后腐蚀称为闭运算,即:

先腐蚀后膨胀称为开运算,即:

由于浪涌测试识别对象多为光源,明暗对比大,像散现象严重,在光源边缘会产生彩色边;反射现象可能导致部分非光源位置存在高亮细长区域。
故采用5阶圆形结构元素:

对Ω1先进行1次闭运算、1次开运算,连接邻近物体、消除细长或点状区域,经形态学处理后图像Ω2为

2 自学习k-NN分类算法
在浪涌测试中,由于对象样本与标签可以容易获得,可采用k最近邻(k-Nearest Neighbor,k-NN)分类算法进行模式识别,算法思想为:若样本在特征空间中的k个最相似样本(特征值之间距离最小)中大多数属于类别Cj,则该样本也属于类别Cj。设灯具、显示屏、状态灯、干扰(反光)分别为C1、C2、C3、C4。
设样本S的像素数n、偏心率e、密实度比r、欧拉数E,在特征空间中,S可由特征向量X与标签Y表示:

选择各类别Cj均为N个的5N个样本Si,由式(7)训练构成初始数据集T0,则:

当输入标签Yr未知的样本Sr时,其与数据集Tz(z∈N)中各样本Si的欧几里德距离Dri为

选取k个dri最小的样本,构成集合Nk(Xr),样本Sr的标签Yr可由多数表决法获得:

式中ICj(Yi)为示性函数,当Yi=Cj时,ICj(Yi)=1;反之为0。并且,当识别样本Sr时,集合Nk(Xr)内所有样本均为类别Cj时,则将Sr加入预备数据集Tz′:

若预备数据集中Tz′有4个元素时(4个类别不同样本),令Tz′加入数据集Tz中,形成数据集Tz+1,即:

式(9)~式(12)为自学习k-NN分类方法。该方法仅需由人工训练初始数据集T0,即可在后续使用中,选择置信度为k的样本,扩充数据集Tz。
3 实验与应用验证
应用于威凯检测技术有限公司浪涌测试中,采用TEVO-VX3-1080摄像机与上位机构建试验平台;图2为浪涌测试设备状态识别平台机理。

图2 浪涌测试设备状态识别平台机理图
通过相机获取灯具、显示屏、状态灯、反光等4种状态样本;令高亮阈值Tb=240、高亮比例阈值Rb=0.05、白光比例阈值Rw=0.2,由多颜色模型阈值分割经形态学处理后,获得对应二值图。图3为4种状态样本图像、分割与预处理后二值图像,图中灯具、显示屏、状态灯、反光分别采用红、黄、白、蓝显示,可以准确提取各图像中的ROI。
选择灯具、显示屏、状态灯样本每类15个,共45个,并使试验中存在干扰情况样本15个,以每种情况均出现1次为1组,共15组;其中6组用于分类算法学习,9组用于算法验证。验证用的9组样本,均按照2帧的速率采集图像并识别,识别时间持续5 min,则每种状态识别图像5 400张,并按照标准IEC 61000-4-5——2005给出评价结果。表1为9组验证样本的识别结果,算法对识别对象分类准确率可达98.65%。
训练得数据集T0在9组各类样本的识别中,自学习扩充5组样本为数据集T5。表2为自学习前、后数据集的平均距离矩阵。由表2可见,均有较好的分类效果;在9组样本中训练得5组数据集,且数据集距离矩阵变化较小,可见算法学习效率、学习准确度较高。
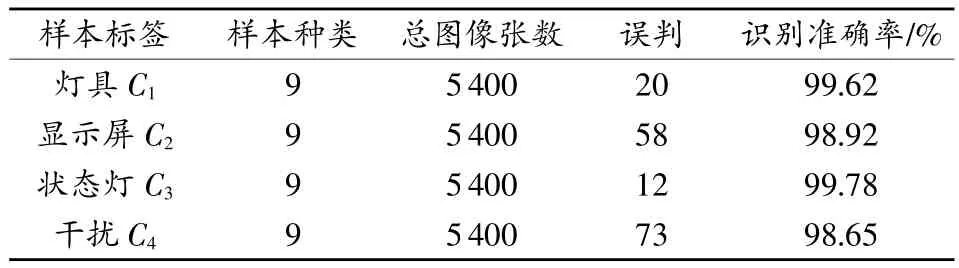
表1 验证样本识别结果
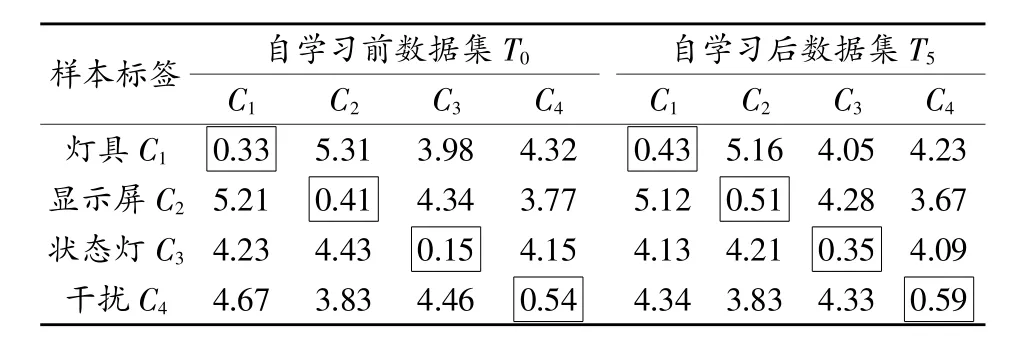
表2 自学习前、后数据集平均欧氏距离矩阵
4 结束语
1)研究基于HSV、L*a*b*、HSL的多颜色模型阈值分割方法,根据图像中高亮度点、白光所占比例,决策用于图像分割的颜色模型,解决高亮度识别、低亮度下不同色灯分辨问题。
2)自学习k-NN分类算法,针对浪涌测试识别对象特征,以像素数n、偏心率e、密实度比r、欧拉数E为样本S特征向量X,构建数据集T0;在样本分类过程中,若样本择置信度为k,加入预备数据集Tz′中,当Tz′满足条件,则扩充数据集Tz形成数据集Tz+1。
3)应用于浪涌测试中,对主要识别对象,最高可以达到100%准确的效果,在9组样本中训练得5组数据集,且新数据集距离矩阵变化较小,可见算法学习效率、学习准确度较高。
参考文献
[1] WILLIAMS T,FLOOD J. Guidance note addresses surge test problems[J]. Compliance Engineering,2002(19):47-49.
[2] DASILVA D A,DACOSTA E C M,DEFRANCO J L,et al. Reliability of directly-molded polymer surge arresters:Degradation by immersion test versus electrical performance[J]. International Journal of Electrical Power and Energy Systems,2013(53):488-498.
[3] XU Y,MAENO K,NAGAHARA H,et al. Camera array calibration for light field acquisition[J]. Front Comput Sci,2015,9(5):691-702.
[4] WANG X D,WU X J,ZHANG X R. Multi-resolution texture synthesis from turntable image sequences[J]. Front Mech Eng,2012,7(1):72-80.
[5] AMATO G,FALCHI F,GENNARO C. Geometric consistency checks for kNN based image classification relying on local features [J]. 4th International Conference on SImilarity Search and APplications,SISAP 2011,June 30,2011-July 1,2011:81-88.
[6]华才健,蹇红梅,张燕.基于机器视觉的火花塞间隙检测技术[J].中国测试,2014,40(5):108-110.
[7]陈耿新,黄坚,刘桂雄.基于可信k-NN的面向EMC浪涌测试多状态灯模式识别[J].电子测量与仪器学报,2015(11):1718-1724.
[8]顾明,郑林涛,尤政.基于颜色空间转换的交通图像增强算法[J].仪器仪表学报,2015(8):1901-1907.
[9] SOLEIMANIZADEH S,MOHAMAD D,SABA T,et al. Recognition ofpartially occluded objects based on the three different color spaces(RGB,YCbCr,HSV)[J]. 3D Research,2015,6(3):1-10.
[10] CHERNOV V,ALANDER J,BOCHKO V. Integer-based accurate conversion between RGB and HSV color spaces[J]. Computers & Electrical Engineering,2015,46(8):328-337.
[11] PENG Z Y,CHANG F L,DONG W H. Color harmony system based on lab perceptual uniform color space[C]∥Communications in Computer and Information Science,2015(525):45-54.
[12] KAARNA A,LIU W,KLVIINEN H. Development of color density concept with color difference formulas in respect to human vision system[J]. Front Elect Electr Eng Chin,2011,6(2):381-387.
[13]黄坚,刘桂雄,王小辉.滤光片表面缺陷视觉检测系统多处理器调度优化[J].中国测试,2015,41(10):90-93.
(编辑:李刚)
Multi-color space threshold segmentation and self-learning k-NN algorithm for surge test EUT status identification
GUO Xuemei1,LIU Guixiong2
(1. Guangzhou Institute of Automation,Guangzhou 510070,China;2. School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510641,China)
Abstract:As the identification objects vary in different surge tests,new samples need to be trained for equipment under test each time when feature matching is used to identify equipment status. Therefore,multi-color space threshold segmentation and self-learning k-NN algorithm were proposed. First,color models(L*a*b*,HSL,HSV)for image segmentation were selected to realize self-adaptive division according to the proportions of high luminance points and white luminance points in the image. Second,k-NN algorithm was proposed to construct a data set T0via a feature vector X of the sample S formed by pixel n,eccentricitye,compactness r and Euler’s numbers E,and the sample S was classified through Euclidean distance D. Third,sample confidence coefficient k was added into a preliminary data set Tz′. When Tz′met the conditions,the data set Tzwas expanded to form data set Tz+1. The results show that the accuracy is up to 98.65% after the k-NN algorithm is used to identify nine groups of different samples(totally 21 600 frames of images),and learns to expand to five additional samples. Moreover,the changes in distance matrix are small. It is thus evident that this algorithm is high in learning efficiency and accuracy.
Keywords:multi-color space;k-nearest neighbor algorithm(k-NN);self-learning;surge test
文献标志码:A
文章编号:1674-5124(2016)04-0107-04
doi:10.11857/j.issn.1674-5124.2016.04.023
收稿日期:2015-12-21;收到修改稿日期:2016-01-13
基金项目:广东省前沿与关键技术创新专项(509164744030)
作者简介:郭雪梅(1975-),女,辽宁沈阳市人,硕士,研究方向为自动化与信息工程。
通讯作者:刘桂雄(1968-),男,广东揭阳市人,教授,博导,主要从事先进传感与网络化控制研究。