引导滤波和三维块匹配结合的红外图像去噪
2016-07-04 10:29高陈强
重庆邮电大学学报(自然科学版) 2016年2期
高陈强,李 佩
(重庆邮电大学 信号与信息处理重庆市重点实验室,重庆 400065)
引导滤波和三维块匹配结合的红外图像去噪
高陈强,李佩
(重庆邮电大学 信号与信息处理重庆市重点实验室,重庆 400065)
摘要:针对红外图像存在噪声较大的问题,提出了一种引导滤波和三维块匹配结合的红外图像去噪方法。该方法通过将引导滤波与三维块匹配方法相结合,采用二次联合滤波的策略减轻了三维块匹配去噪方法在平滑区产生明显的“抓痕”现象。通过BM3D (block method of 3-dimension)去噪方法得到初始滤波图像;对噪声图像在低尺度进行BM3D去噪得到比较平滑的引导图像,用引导图像指导初始滤波图像进行二次滤波。仿真结果表明,提出的算法既保持了BM3D去噪算法的优秀性能,且具有更好的视觉效果和更高的峰值信噪比及结构相似度。
关键词:红外图像去噪; BM3D;引导图像滤波;二次滤波
0引言
目前,红外图像已经广泛地应用于军事、民用等领域,但是由于获取到的红外图像普遍存在模糊和噪声大的问题,直接影响了红外图像后期的目标识别、检测跟踪等,因此,对红外图像进行去噪处理有着非常重大的意义。
红外图像的去噪方法目前主要有双边滤波[1]、维纳滤波[2]、小波多尺度几何分析方法[3-7]、非局部均值(non-local means,NLM)方法[8]、字典稀疏表示方法[9]等。双边滤波、维纳滤波以及基于小波多尺度几何分析的方法能够有效地去除噪声,但这些方法都利用的是像素之间的空间关系,即利用图像中邻域的所有像素值来估计这个邻域的中心像素值,因此被称为局部变换,但是由于这种局部变换方法只考虑了图像的局部特性而忽略了图像的全局特性,往往容易丢失图像的边缘、纹理等细节特征。
文献[10]第1次提出了非局部方法,该方法认为在一幅自然图像中会有若干个非常相似的图像块,通过块匹配方法来找到这些与参考块相似的相似块,然后将这些相似块的中心像素加权平均,并用加权平均得到的结果替代匹配过程中的参考块的中心像素,最终通过遍历图像中的所有像素降低图像中噪声。文献[8]将其用于红外图像去噪,由于NLM方法没有使用任何变换,所以经过NLM方法去噪后的图像不会引入假信号。但是,NLM方法实质上是一种空域滤波方法,必须用足够多的像素来估计某个像素,会不可避免地过度平滑图像细节以及带来很大的计算量。
基于字典的图像稀疏表示方法作为另一类方法被成功地运用到了图像去噪中。它考虑到图像中非噪声部分是有结构的而噪声部分是无结构的,因此,无噪声的部分可以通过构造有原子结构的字典来获取。其关键问题是字典的构造和稀疏系数求解。文献[11]提出 K-奇异值分解(K-singular value decomposition, K-SVD)原子库训练和稀疏表示方法,根据噪声图像构造自适应的字典,取得了较好的去噪效果。文献[9]首次将K-SVD用于红外图像去噪,但是由于字典是根据噪声图像自适应确定,当噪声水平比较高时,K-SVD去噪性能急剧下降。
文献[12]根据图像块之间的相似性和变换域阈值收缩性提出了三维块匹配方法(block method of 3-dimension,BM3D),它是一种强有力的图像去噪方法,该方法不仅有较高的峰值信噪比(peak signal to noise ratio,PSNR)以及结构相似度(structural similarity,SSIM)[13],而且视觉效果也很好。文献[14]将其用于红外图像去噪中,但由于BM3D对每个块的二维变换会引入假信号即“抓痕”,当噪声强度相对较大时引入的假信号尤为明显。
为了克服BM3D的“抓痕”问题,本文引入引导图像滤波方法[15]。该滤波方法能够保留图像的整体特征,同时充分获取引导图像的变化细节。同时,当噪声强度比较大的图像经过下采样后噪声水平有所下降,对下采样后图像进行去噪处理会得到相对平滑的图像。为此,本文提出了基于BM3D的二次滤波方法。该方法将下采样处理后的图像作为引导图,对BM3D去噪处理后的图像进行引导图像滤波,实验结果表明,在噪声强度较大时本文方法既保持了BM3D去噪算法的优秀性能,又由于“抓痕”的减少获得了良好的主观视觉效果。
1引导图像滤波和BM3D算法
1.1引导图像滤波
引导图像滤波(guided image filtering)这一概念是在2010由He等[15]提出并且用于图像去雾。引导图像滤波的关键是假设引导图像与滤波器输出图像之间存在一种局部线性关系。即在以像素k为中心的窗口ωk内存在如下线性关系
(1)
(1)式中:Ii为引导图像的像素值;qi为输出图像的像素值;ωk是半径为r的一个方形窗口;(ak,bk)是窗口ωk中的线性系数。通过对这个线性模型求梯度得到▽q=a▽I,即保证了输出图像产生与引导图像相对应的边缘。这个局部线性模型的关键是求解窗口ωk中线性系数(ak,bk),于是文献[14]引入(2)式的代价函数。
(2)
(2)式中:ε是一个防止ak过大的正则化参数;qi=pi-ni,ni为图像中噪声像素值。pi输入图像的像素值,通过使得滤波输出q和滤波输入p的差最小化,即使得代价函数最小化来求解线性系数(ak,bk)。求解(2)式得
(3)
(4)

(5)


图1 引导图像滤波原理图Fig.1 Guided image filtering illustrative diagram
1.2BM3D算法
BM3D去噪算法是由Dabov[7]于2007年提出,它是一种变换域的非局部去噪方法,它既利用图像块之间相似性和冗余性特征,又利用了变换域阈值去噪的思想,获得了非常理想的去噪效果,是目前去噪性能最好的算法之一。整个算法分为2部分,基础估计和最终估计。其步骤如下。
步骤1基础估计。
1)选定相似块进行分组。将图像分成大小一致的有重叠或无重叠的小块,对各个图像块进行二维的离散余弦变换(discrete cosine transform, DCT)或者是小波阈值变换进行预处理,预处理后对于选定的参考块,找到在给定的窗口内与参考块欧氏距离小于某个阈值的图像块作为相似块,将参考块和相似块叠加在一起聚集成相应的三维数组。
2)三维协同滤波。对形成的三维数组进行第三维的小波硬阈值变换,通过对变换域系数进行硬阈值收缩处理来大幅度降低噪声,随后通过三维反变换来产生所有聚集块的估计值,然后返回这些块的估计值到他们的初始位置。
3)聚集重构。由于对于每一块的返回到原始位置的估计值是重叠或非重叠的,于是对所有重叠的块的估计值进行加权平均,得到重叠块的单个的估计值,从而重构出真实图像的基础估计图像。
步骤2最后估计。
1)选定相似块进行分组。不同于初始估计,该步骤先对基础估计得到的图像进行分块,通过欧氏距离搜索到相似块的位置后分组得到一个来自基础估计图像的三维数组,在相同路径下搜索含有噪声图像中这些相似块的位置进行分组得到另一个三维数组。
2)三维协同滤波。对基础估计的图像进行三维变换,得到变换后的能量谱,用它作为真实的能量谱来指导含噪声图像的三维数组进行小波域的经验维纳滤波,随后通过三维反变换可以得到每个相似块的估计值,然后返回这些估计值到他们的初始位置。
3)聚集重构。由于对于每一块的返回到原始位置的估计值是重叠或非重叠的,于是对所有重叠的块的估计值进行加权平均,得到重叠块的单个的估计值,从而得到重构出真实图像的最终去噪结果。图2给出了BM3D去噪原理图。
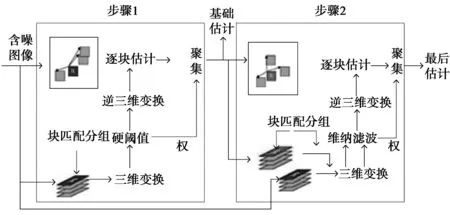
图2 BM3D去噪原理图Fig.2 BM3D denoising illustrative diagram
2算法实现
对一幅噪声图像y,已知y=x+n,其中y为真实的噪声图像,x为要恢复的干净图像,n为0均值、标准差为σ的高斯白噪声。
步骤1对噪声图像y进行BM3D滤波得到初始滤波后图像p;
步骤2对噪声图像y进行均值下采样,对得到的下采样图像进行BM3D滤波,然后对滤波后图像进行双3次插值得到导向图像I;
步骤3将I作为引导图像,对p进行导向滤波,得到最终的输出图像q。
本文方法流程图实现过程如图3所示。
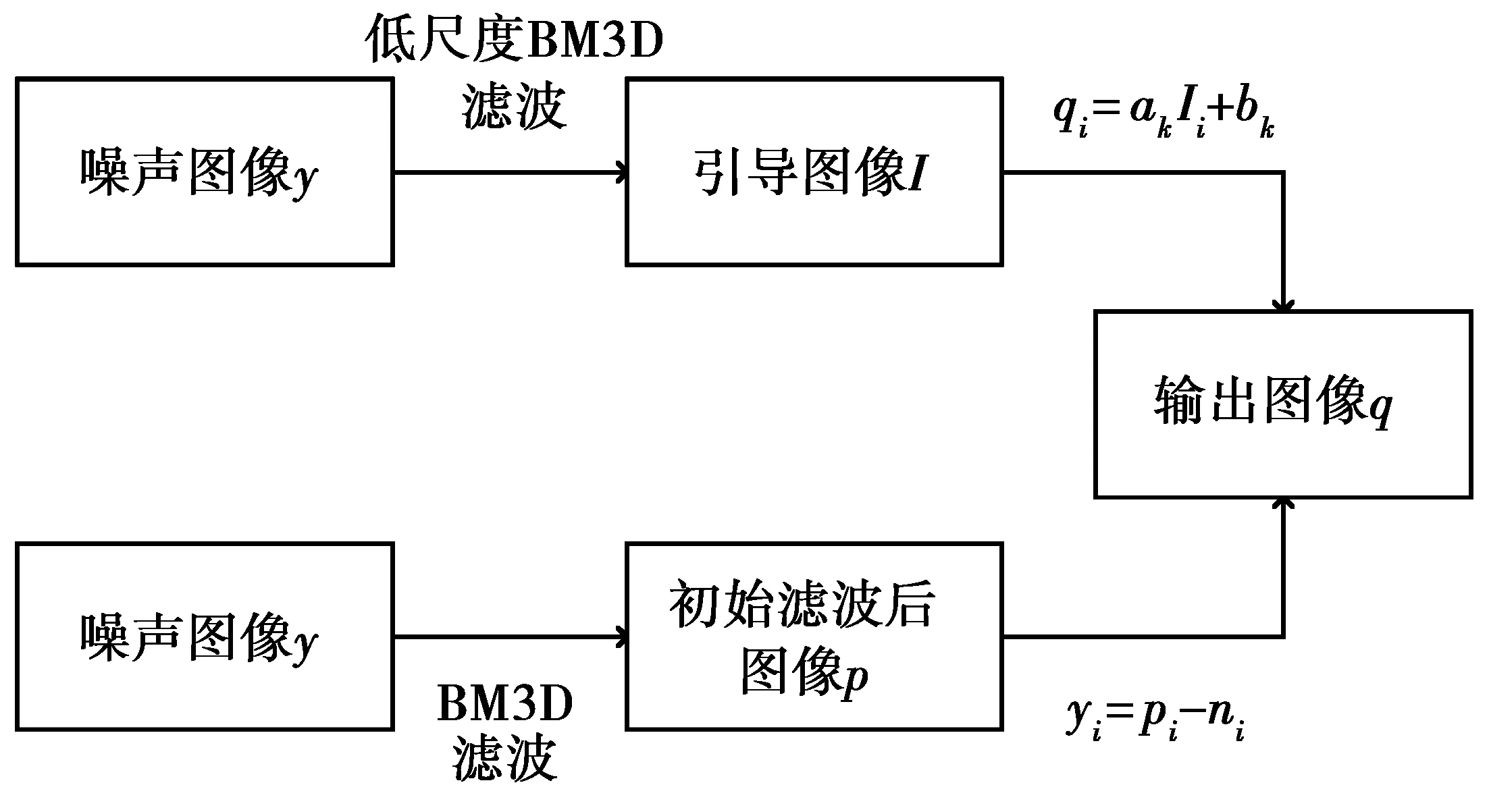
图3 本文算法流程图Fig.3 Paper algorithm flowchart
3仿真结果以及参数分析
本文以Terravic Motion IR Database运动红外数据库作为实验的对象,以PSNR和SSIM作为衡量去噪图像质量的定量指标。图像的PSNR越高,去噪信号就越接近原始信号,去噪的效果也就越好。SSIM是衡量2幅图像相似度的新指标,它从图像亮度(luminance)、图像对比度(contrast)和图像结构(structure)去判断处理过的图像与原图的差异。其范围是0-1,SSIM指标的值越大,代表2个信号的相似性越高。本实验将BM3D算法和改进的BM3D算法分别与文献[1]提出的小波阈值、文献[7] 提出的NLM、文献[8]提出的K-SVD进行了对比分析,并且对该数据集中不同场景下、不同程度噪声水平(σ=25,50,75,100)的图像进行了测试。表1、表2分别给出了测试图像的PSNR,SSIM对比结果。
从表1、表2可以看出,在噪声标准差为25及以上时,BM3D算法对比目前的一些红外图像去噪方法有更高的峰值信噪比以及结构相似度。本文提出的改进的BM3D算法对比BM3D算法不仅有更高的峰值信噪比而且在结构相似度上有明显地提升。图4c—图4g、图6c—图6g分别给出了在室外房子监控场景和水面跟踪场景下在高噪声水平(σ=75)下各方法去噪后的视觉效果对比图。可以看出,小波阈值去噪后噪声仍大量存在,NLM去噪后图像过于平滑,K-SVD去噪后产生大量的“斑点”,BM3D去噪后产生明显的“抓痕”。图5、图7分别给出了在室外房子监控场景和水面跟踪场景下BM3D和本文方法去噪的局部放大图,局部图分别来自原图中右下角部分。可以看出本文方法因为有更少的“抓痕”而产生更好的视觉效果。
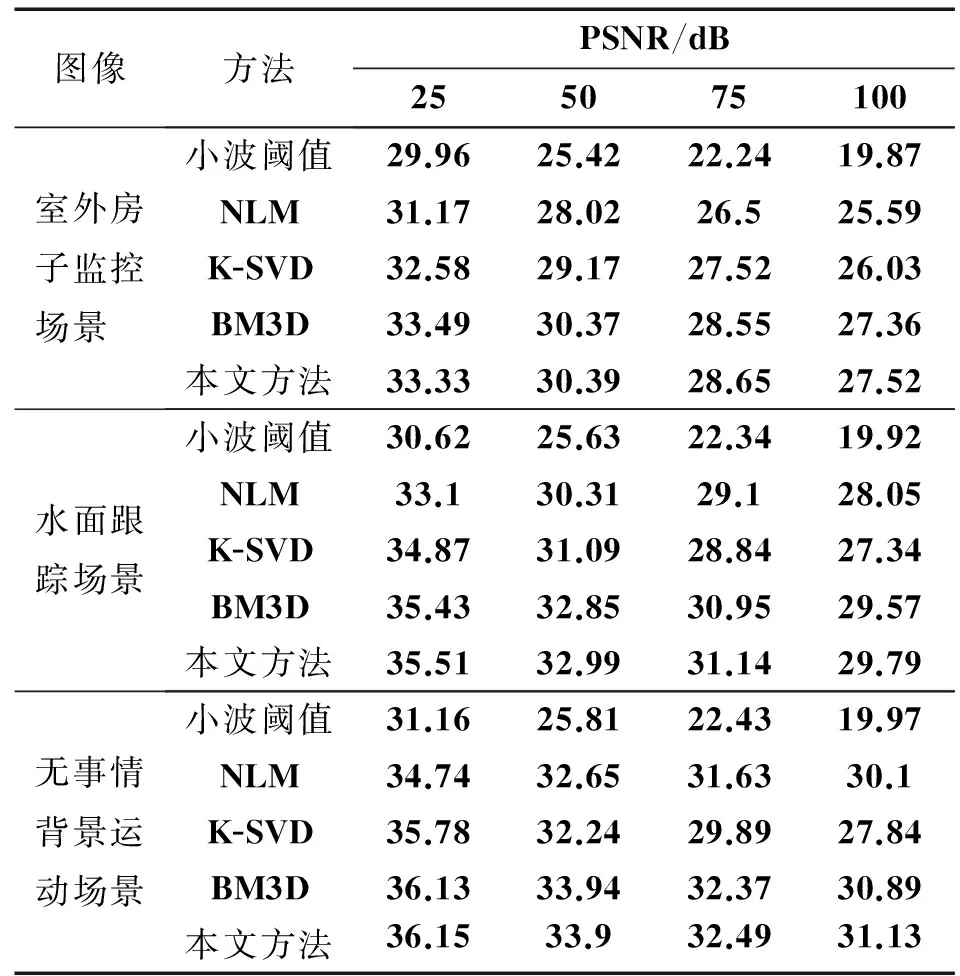
表1 不同场景下峰值信噪比(PSNR)对比
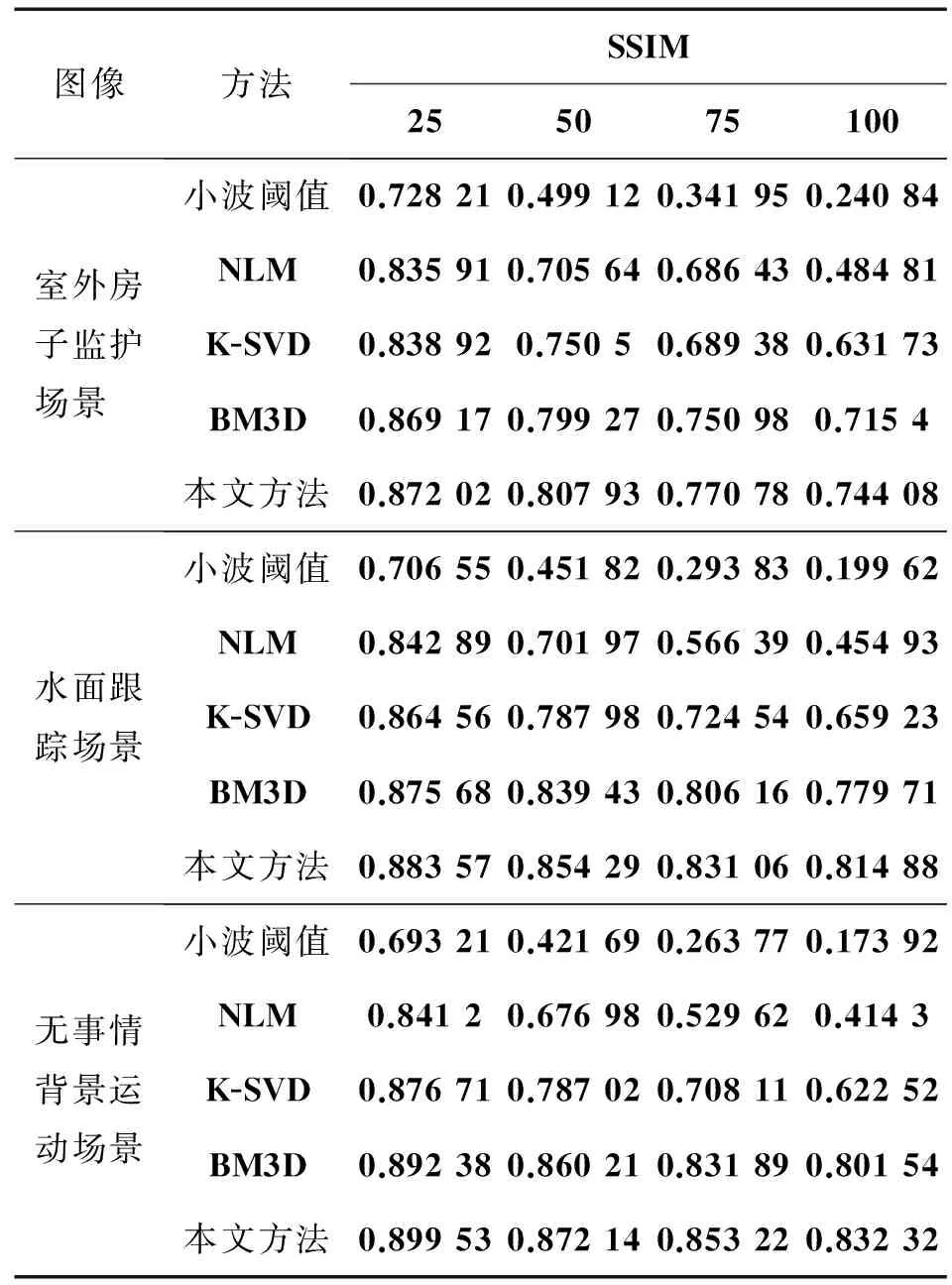
表2 不同场景下结构相似度(SSIM)对比

图4 不同方法在室外房子监控场景下的去噪效果对比图Fig.4 Denoising effects comparison image of different methods under the surveillance scene of outdoor house
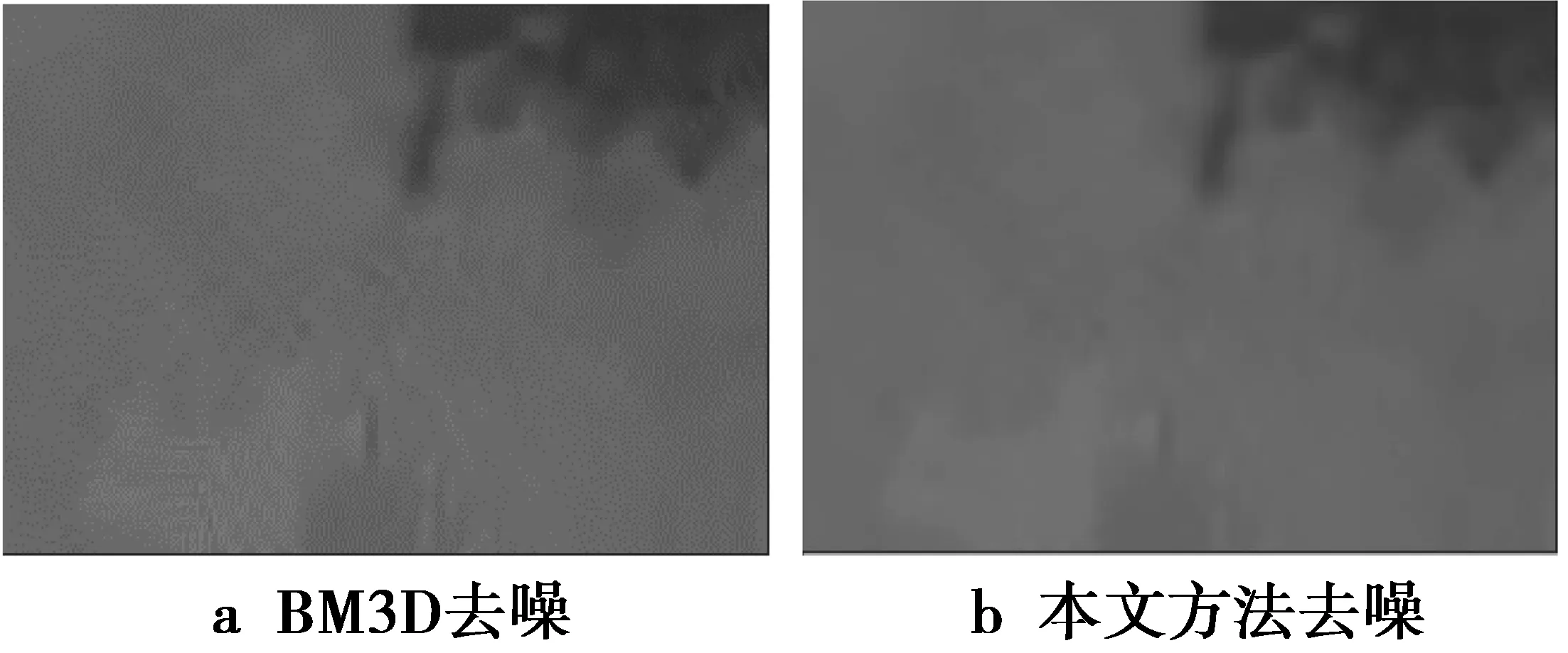
图5 BM3D和本文方法在室外房子监控场景下的去噪细节放大图Fig.5 Enlarged denoising details image between BM3D and the proposed method under the surveillancescene of outdoor house
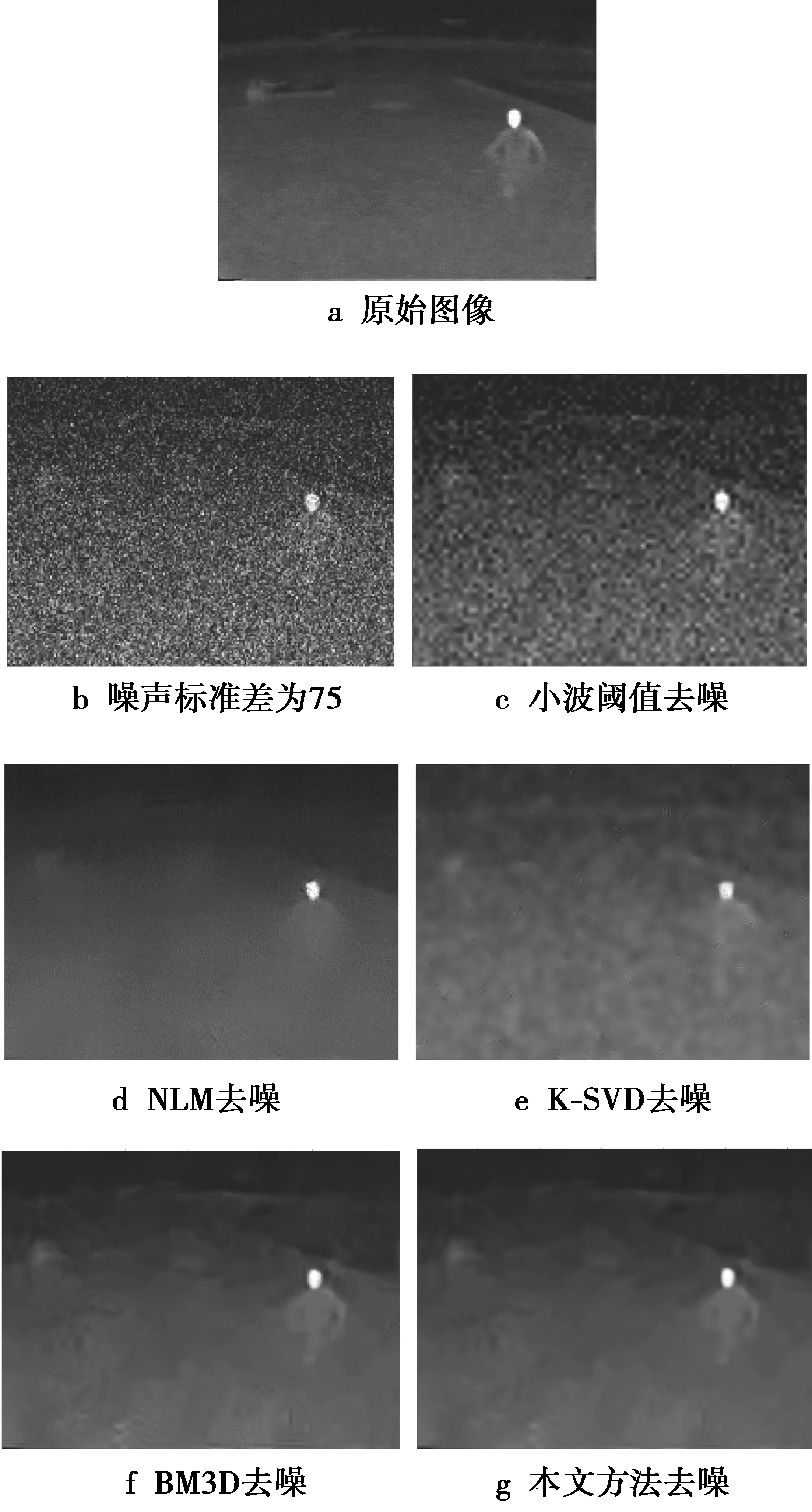
图6 不同方法在水面跟踪场景下的去噪效果对比图Fig.6 Denoising effects comparison image of different methods under the tracking scene of the surfaceof the water
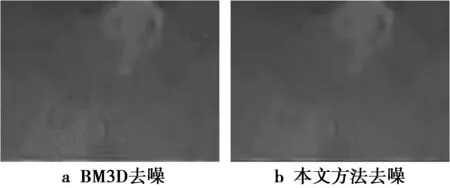
图7 BM3D和本文方法在水面跟踪场景下的去噪细节放大图Fig.7 Enlarged denoising details image between BM3D and the proposed method under the tracking sceneof the surface of the water
4结论
本文将三维块匹配(BM3D)算法用于红外图像去噪,该算法先利用图像的自相似性对图像块分组形成三维数组,然后对三维数组进行变换域的阈值处理以及维纳滤波来减弱噪声,最后对图像块加权平均重构原始图像。实验结果表明,该算法在去噪性能指标和视觉效果上均优于现有的红外图像去噪算法。
本文针对BM3D在高噪声强度下出现明显“抓痕”问题提出将下采样处理后的更加平滑图像作为引导图,对BM3D去噪处理后图像进行引导图像滤波的方法。实验结果表明,该方法进一步提升了BM3D算法的性能,并且取得了更好的视觉效果和更高的峰值信噪比以及结构相似度。
参考文献:
[1]ZHONGCE W, WEI X. Research on a Bilateral Filtering Based Image Denoising Algorithm for Nightly Infrared Monitoring Images[C]//3rd International Conference on Computer Science and Service System(CSSS). Thailand:Atlantis Press, 2014: 199-203.
[2]LI B S, CUI K B, XU X T, et al. Infrared Image Denoising Based on Peer Groups with Median Filtering and Wiener Filtering[J]. Applied Mechanics and Materials, 2013, 48(7): 1059-1062.
[3]YU J, LUO Z, YIN Y, et al. Study on infrared image denoising of friction pairs based on morphological edge detection and wavelet threshold[J].Zhongguo Jixie Gongcheng(China Mechanical Engineering), 2013, 24(9): 1229-1232.
[4]HUANG X, ISLAM S M, LIAO M, et al. Higher quality of infrared images for future network security systems[C]//Wireless Personal Multimedia Communications (WPMC). Atlantic: IEEE Press, 2013: 1-6.
[5]FEI W, XIAOGENG L, YANKAI C, et al. Infrared Image Adaptive Denoising Algorithm in Contourlet Transform with Sharp Frequency Localization[C]//Computational Intelligence and Design (ISCID).New Zealand: IEEE Press, 2011: 44-47.
[6]TANG C J, LIU Y P. Image correlation denoising based on nonsubsampled Contourlet transform[J]. Information and Electronic Engineering, 2012, 10(6): 740-743.
[7]祝强,徐臻.采用小波构造的图像阈值去噪算法[J].重庆理工大学学报:自然科学版,2013(6):61-67.
ZHU Qiang, XU Zhen. The study of image threshold de-noising based on wavelet construction[J]. Journal of Chongqing University of Technology: Natural Science, 2013(6):61-67.
[8]DEE Noor B, STERN A, YITZHAKY Y, et al. Infrared image denoising by nonlocal means filtering[C]// SPIE Defense, Security, and Sensing. Baltimore Convention Center: SPIE, 2012:83990K-83990K-8.
[9]ZHANG Ying , GAO Chenqiang. Infrared image denoising via sparse representation over redundant dictionary//[C]Image and Signal Processing.Dalian: IEEE Press, 2012: 321-325.
[10] BUADES A, COLL B, MOREL J M. A review of image denoising algorithms, with a new one[J]. Multiscale Modeling & Simulation, 2005, 4(2): 490-530.
[11] MICHAEL E, MICHAL A. Image denoising via sparse and redundant representations over learned dictionaries[J]. IEEE Transactions on Image Processing, 2006, 15(12):3736-45.
[12] DABOV K, FOI A, KATKOVNIK V, et al. Image denoising by sparse 3-D transform-domain collaborative filtering[J]. Image Processing, IEEE Transactions on, 2007, 16(8): 2080-2095.
[13] HORE A, ZIOU D. Image quality metrics: PSNR vs. SSIM[C]//Pattern Recognition (ICPR). Turkey: IEEE Press, 2010: 2366-2369.
[14] 康长青, 曹文平, 华丽, 等. 两阶段三维滤波的红外图像去噪算法[J]. 激光与红外, 2013, 43(3): 261-264.
KANG C Q, CAO W Q, HUA L, et al. Infrared image denoising algorithm via two-stage 3D filtering[J]. Laser Infrared, 2013, 43(3): 261-264.
[15] HE K, SUN J, TANG X. Guided image filtering[M]. Greece: Springer Berlin Heidelberg, 2010: 1-14.
Infrared image denoising based on three-dimensional block matching
GAO Chenqiang, LI Pei
(Chongqing Key Laboratory of Signal and Information Processing, Chongqing University of Posts and Telecommunications,Chongqing 400065, P. R. China)
Abstract:Due to high noise exists in infrared image, this paper presents an infrared image denoising method that combines guide filtering and the three-dimensional block matching. By combining the three-dimensional block matching and guide filtering, this method reduces the phenomenon of that three-dimensional block matching method which produces a significant “scratch” in the smooth area by the strategy of second joint filtering. First, the initial filtered image is got by BM3D (Block Method of 3-Dimension) denoising method; Second, smoother boot image is got by BM3D denoising in low scales, and the initial filtered image is filtered again with its guidance based on the principles of guiding image filter. Simulation results show that the proposed algorithm can maintain the excellent denoising performance of BM3D algorithms, and has better visual effects and peak signal to noise ratio and higher structural similarity.
Keywords:infrared image denoising; BM3D; guide image filter; second filtering
DOI:10.3979/j.issn.1673-825X.2016.02.002
收稿日期:2015-01-19
修订日期:2015-03-18通讯作者:李佩lipeisww@gmail.com
基金项目:国家自然科学基金(61102131); 重庆市科委自然科学基金(cstc2014jcyjA40048); 重庆邮电大学文峰创业基金(WF201404)
Foundation Items:The National Natural Science Foundation of China(61102131); The Natural Science Foundation Project of Chongqing Municipal Science and Technology Commission (cstc2014jcyjA40048); The Cooperation of Industry Education and Academy of Chongqing University of Posts and Telecommunications (WF201404)
中图分类号:TN914.53
文献标志码:A
文章编号:1673-825X(2016)02-0150-06
作者简介:
高陈强(1981-),男,重庆人,教授,博士,主要研究方向为图像处理、红外图像仿真、红外弱小目标检测。E-mail : gaocq@cqupt.edu.cn。

李佩(1989-),女,湖北荆州人,硕士研究生,主要研究方向为烟火检测、红外图像去噪。E-mail: lipeisww@gmail.com。
(编辑:张诚)